深度学习修炼(一)线性分类器 | 权值理解、支撑向量机损失、梯度下降算法通俗理解-程序员宅基地
技术标签: python 机器学习 深度学习 计算机视觉CV
文章目录
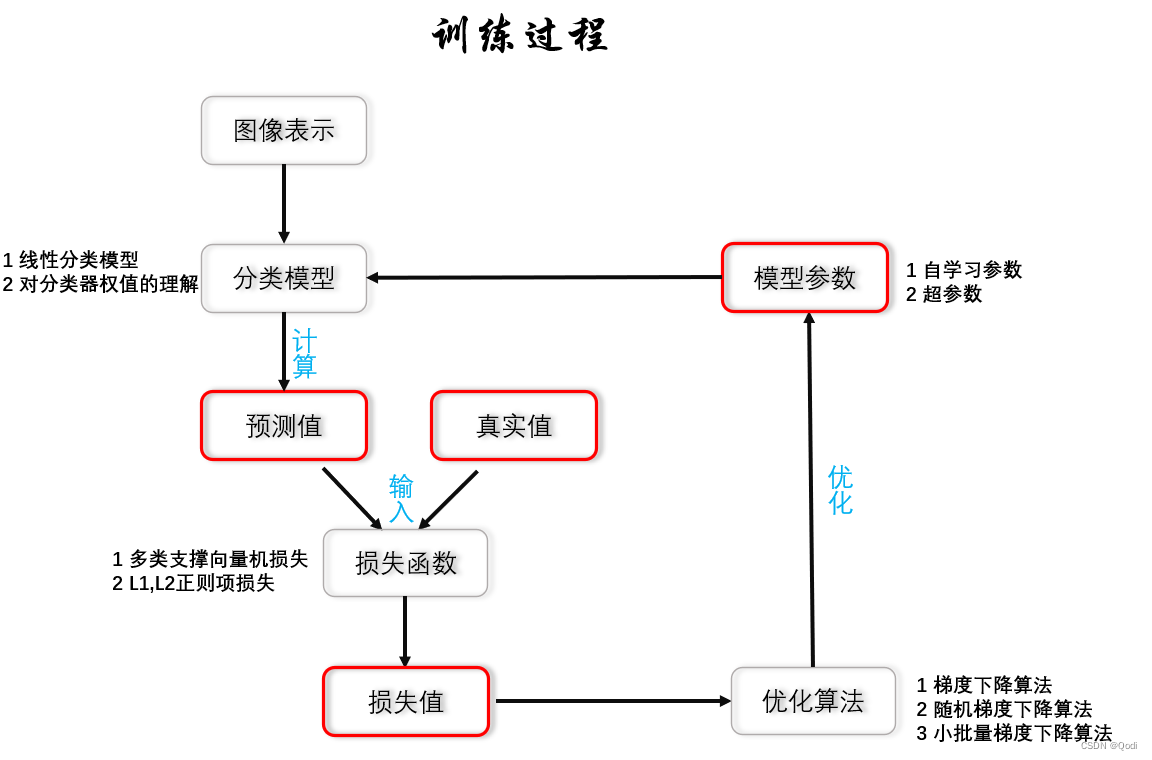
如图是神经网络训练的一般过程总结图
今天从线性分类器开始
为什么我们从线性分类器开始?是由于线性分类器的基本特点决定的
1 基本特点
形式简单、易于理解,通过层级结构(神经网路)或者高维映射(支撑向量机)可以形成功能强大的非线性模型。
从某种意义上来说,未来的卷积网络以及更为复杂的网络都离不开线性分类器
线性分类器是一种线性映射,将输入的图像特征映射为类别分数
2 训练过程
2.1 图像预处理
比如张CIFAR10 中每一张图像像素为32×32 ,每一个(采用RGB)像素通道为3,我们首先要将图片转换为一个向量,转换方式多种,现在我们只做简单的转换方式,用一个32×32×3=3072维的列向量来表示我们这张图片。
2.2 线性分类器构造
f i ( x , w i ) = w i T x + b i f_i(x,w_i)=w_i^Tx+b_i fi(x,wi)=wiTx+bi i = 1 , . . . , c i=1,...,c i=1,...,c
- x代表输入的d维图像向量 这个例子是3072维度的向量
- w i = [ w i 1 , . . . , w i d ] T w_i=[w_{i1},...,w_{id}]^T wi=[wi1,...,wid]T为第i个类别的权值向量,行数由类别数决定,如以上例子有10类,列数由输入的x向量的维度决定,如以上例子为3072维 因而 w i w_i wi的维度为10×3072
- b i b_i bi为偏置值。
当我们把一张图片(转换为3072×1的向量),输入到这个式子中,得到每个类下这张图片的分数(10×1的列向量),分数越高,是该类别的可能性就越大

然后我们就需要让模型不断优化这些参数,使得最后正确的类别的分数尽可能高
在线性模型的例子中,我们本质学习到什么?就是上图的这个W矩阵 ! 也就是分类器的权值,优化模型也就是优化这里的权值
那边该怎么理解这个权值呢?
2.2.1多角度理解我们分类器的权值W
理解线性分类器的角度一
线性分类器的w权值信息,其实就是训练样本的平均值,统计信息,是每一类别的一个模板。由于W也是3072维的,因而我们可以进行权值模板的可视化
我们可以把它显示为32×32×3的图片,这时候就会得到10张图片,对应10类,我们实际上是将权值W可视化,观察我们可以发现:每一类其实就是该类下各个图片的一个均值,一个统计信息,如果我们新输入的图片和某一类模板相似,就会导致该类模板对应的额分数更高。
比如这里的W8代表马类,观察到两个马头,一个朝左,一个朝右,为什么呢?因为训练样本中就有的马头朝左,有的马头朝右

理解线性分类器权值角度二
如图,我们实际上就是要找一些分界面,来把不同类比的分开,如下面的红蓝绿线
- 我们距离线越远,他的得分越高,也就意味着相应的类别特征越明显
- 距离线越近,得分越低,也就类别特征越模糊
分数等于0的相当于一个决策面 分界面。
w控制着线的方向,b控制着分界面的偏移

但是真实世界中的数据集往往都不是线性可以分开的,线性网络表现会很差
所以在此基础上有很多非线性操作进行改进,如多层感知机,卷积等
2.3 损失函数计算损失值
我们要优化模型参数,就离不开损失函数的帮助
2.3.1 损失函数定义
什么是损失函数呢?
比如我们的真实值是猫咪,设有两组权值他们对于猫咪的预测的分数都是最高的,但我们权值一预测猫咪的分数是900分,权值二预测的分数是100分,很明显权值一更好,因而我们就是通过损失函数来定量的展现这样的差异。
它搭建了模型性能与模型参数之间的桥梁,指导模型参数的优化,
它其实是预测值与真实值的不一致程度,量化了这个指标,我们把它称为损失值,损失值越大,不一致程度越大,也就预测的越不准确
我们的每一次学习结束后,都可以对应得到一些新的参数,我们检测新的参数的好坏。
可以拿一百张新的图像去测试,然后把每一张图片的测试结果都对应得到一个损失值,把这一百个损失值加起来除以测试总数一百,就得到我们平均的损失值。反映了这一组参数的整体的水平,抽象为数学表达式为
L = 1 N ∑ ( L i ) L=\frac{1}{N}\sum(L_i) L=N1∑(Li)
L i L_i Li为 单张图片的损失值
损失函数有很多,先举一个例子
2.3.2 损失举例:多类支撑向量机损失
单样本的多类支撑向量机损失
L i = ∑ m a x ( 0 , s i j − s y i + 1 ) L_i=\sum{max(0,s_{ij}-s_{yi}+1)} Li=∑max(0,sij−syi+1)
如何直观理解多类支撑向量机损失?
如果模型给 正确类别打的分数比给错误类别的分数高1分及以上,这时损失函数返回为0。
否则的话就是把模型给错误类别的分数加上1分减去我们正确类别的分数就是我们得到的损失值。
看个例子就明白了
横行是模型给一张图的类别判断,分越高,模型觉得图形是哪一类

如上
- 第一行的正确类为鸟类,模型给错误类猫类分数比鸟类分数高2.9 超过一分,该项损失值为0,但对于汽车类模型没有高超过一分(反而低),因而错误的汽车类分数+1得到2.9再减去正确类鸟类的分数0.6等于2.3 1.9+1-0.6=2.3 总损失0+2.3=2.3
- 第二行的正确类为猫类,比错误类鸟类分数高超过一分,该项损失值为0,但对于汽车类没有高超过一分,因而错误的汽车类分数+1得到3.3再减去正确类猫类的分数2.9等于0.4 2.3+1-2.9=0.4 总损失0+0.4=0.4
- 第三行的正确类为汽车类,比其他错误类的分数都大于一分,因而总损失为零
2.3.3 优化损失函数
即便有了损失值,有时候我们也会出现损失值一模一样的情况,这时候如何评定参数好坏呢?就是通过添加包含超参数正则项损失 其中 λ \lambda λ 是超参数(超参数 不通过学习设置的参数,预先人为设定好的参数)这个超参数的作用是控制着正则项损失在总损失中占得比重
- λ \lambda λ为0的时候只依靠前面的损失函数
- λ \lambda λ为无穷的时候仅考虑正则项损失
L = 1 N ∑ ( L i ) + λ R ( W ) L=\frac{1}{N}\sum(L_i)+\lambda R(W) L=N1∑(Li)+λR(W)
正则项具体可以分为:
L1 正则项 把权值矩阵W的每个元素取绝对值后再相加
L2 正则项 把权值矩阵W的每个元素先平方再相加
如何直观理解正则项
正则项对于大数权值进行惩罚,喜欢分散权值,鼓励分类器将所有维度的特征值用起来。而不是强烈的依赖其中少说的几维特征。防止模型训练的太好,过拟合(即只能学会自己的数据)。
使得每个维度的特征运用起来,有什么意义呢?
- 避免受到噪声影响,假设它强烈依赖某一维度,那么一但那一维度受到噪声污染,判断就会严重错误,而如果分散权值,那么即便某一维度受到影响,也不影响整体判断
- 还有避免模型产生偏好,对某一维度的特征喜欢,产生记忆,因而也就会产生过拟合,所以正则项的一个重要作用就是防止过拟合!!!
我们目前更多地是使用L2正则项,原因是计算方便
不过L1损失函数也有优点,就是L1对于异常值更不敏感,鲁棒性更强
2.4 优化算法
2.4.1 优化的定义?
是机器学习的核心步骤,利用函数的输出值作为反馈信号来调整分类器参数,以提升分类器对训练样本的预测性能。
实际上我们就是要找使得损失函数的值是最小的那一组参数!!!而我们对这类问题并不陌生,高中的时候学习导数的时候讲过求最值问题,实际上是要找一些导数为零的点,这些导数为零的点中就有我们的最小值点。
假如我们只有一个参数W,且损失函数是
L = W 2 + 2 W + 1 L=W^2+2W+1 L=W2+2W+1
我们想要使得损失函数最小,我们可以很轻松知道是在W=-1的位置
但是实际问题中,我们的损失函数L往往非常复杂,同时W也十分庞大,如下图一个简单的线性模型,他的要学习的W的参数量就达到了10*3072维=30720。直接求导数为零的点就会变得十分困难,所以我们通过梯度下降算法来使得损失减小。

2.4.2 梯度下降算法
它是其中的一种简单而高效的优化算法
设想我们被遮住了双眼,被困在一个寂静的山谷,我们只知道只能在山谷最低的地方才有机会存活下来。我们该怎么办
唯一的办法是四处摸,找到向下的路,然后一点一点从高处移动到低处。
这 便是梯度下降算法的核心思想
我们需要把全部训练数据样本传入我们的分类器,这时候他就会根据我们的输出类别分数的好坏去调整参数W
相当于此时我们是 L ( W i ) L(W{_i}) L(Wi) 自变量是W,因变量是损失值L
我们只需要解决两个问题
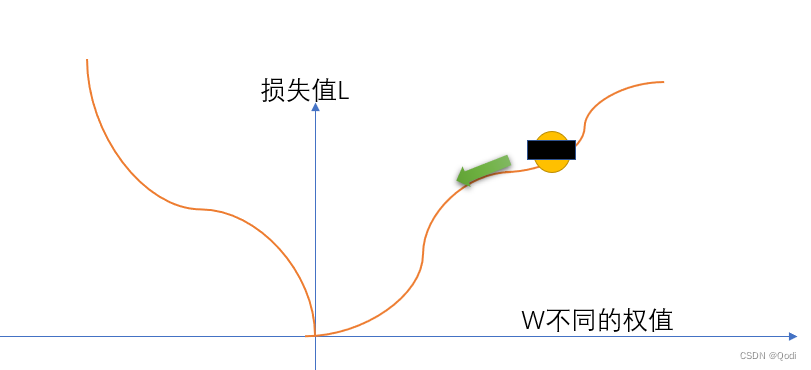
往哪走?
负梯度方向,也就是向导数为负数且变化最快的点走,导数为负的点可以让函数值减小,也就是损失减小
走多远?
步长(也就学习率)来决定,步长也是我们的认识到的第二个超参数
因而我们把问题由找到导数为零的点转换为求某一点的梯度, ∂ f ∂ W i \frac{\partial f}{\partial W_{i}} ∂Wi∂f进而来不断更新权值
权值的梯度 <=计算梯度(损失,训练样本,权值)
权值 <=权值-学习率*权值的梯度
如何来求某一点的梯度呢?也就是在 一个已知一个权值矩阵的基础上如何确定他的梯度
1、 数值法
也就是利用求导的定义式,所以求得的是一个近似值
数值法求梯度主要用于检验解析梯度是否正确
2、 解析法
求这一点的导数,然后代入这一点的值
但这有一个问题,我们每次迭代计算都得把样本中的每一个数据都算一遍!当数据集样本足够大的时候,运算速度就会很慢,因而我们采用以下的方式改进
2.4.3 随机梯度下降算法
也就是我们这次不参考全部样本,而是从样本集合中随机抽取一个来更新。这样就会计算很多了,但是这样有一个问题,就是可能会抽取到噪声等一些不太好的样本,这时候会把我们带偏,但是这种方法依然可行,因为在大量抽样的情况下,整体还是向着梯度下降的方向去的。
2.4.4 小批量梯度下降算法
既然全部抽取速度太慢,部分抽取又可能会不稳定,那我们很容易想到取中间,也就是说我们随机抽取m个样本,计算损失并更新梯度。
这样的话我们计算效率会更高,同时也会更稳定!!!
梯度下降算法(Gradient Descent)的原理和实现步骤 - 知乎 (zhihu.com)
[梯度下降算法原理讲解——机器学习_zhangpaopao0609的博客-程序员宅基地_梯度下降](
智能推荐
自定义log4j的appender_log4j appender 自定义-程序员宅基地
文章浏览阅读7k次。实现自定义log4j Appender其实很简单:1、继承log4j公共的基类:AppenderSkeleton2、打印日志核心方法:abstract protected void append(LoggingEvent event);3、初始化加载资源:public void activateOptions(),默认实现为空4、释放资源:public void close()_log4j appender 自定义
termux获取sd卡读写权限_stm32 SPI读写储存卡(MicroSD TF卡)-程序员宅基地
文章浏览阅读2.4k次。简述花了较长的时间,来弄读写储存卡(大部分教程讲的比较全但是不是很容易懂),这里希望我的代码经验能够帮助到你。操作分析及实现0.整个流程1、上电以后储存卡的初始化2、如何进行读写实现1.上电以后储存卡的初始化上电给MicroSD卡至少74个时钟信号发送CDM0 (x041)复位发送CMD1 让MicroSD卡进入SPI模式2.如何进行读写这里主要对1,3进行详细的讨论你需要知道的是spi通信是怎样..._termux sd卡权限
VS code 配置java环境并运行_visio studio code java project怎么运行-程序员宅基地
文章浏览阅读6.4k次,点赞5次,收藏27次。环境准备jdk1.8 jdk1.8.0_121maven apache-maven-3.6.01、安装java运行环境插件Language Support for Java by Red HatDebugger for JavaJavaTest RunnerMaven for JavaProject Manager for JavaJava Extension Pack插件用途java运行环境调试(debug)java所需单元测试java所需maven 环境,如果你是_visio studio code java project怎么运行
分布式光纤传感器的全球与中国市场2022-2028年:技术、参与者、趋势、市场规模及占有率研究报告_预计2026年中国分布式传感器市场规模有多大-程序员宅基地
文章浏览阅读3.2k次。本文研究全球与中国市场分布式光纤传感器的发展现状及未来发展趋势,分别从生产和消费的角度分析分布式光纤传感器的主要生产地区、主要消费地区以及主要的生产商。重点分析全球与中国市场的主要厂商产品特点、产品规格、不同规格产品的价格、产量、产值及全球和中国市场主要生产商的市场份额。主要生产商包括:FISO TechnologiesBrugg KabelSensor HighwayOmnisensAFL GlobalQinetiQ GroupLockheed MartinOSENSA Innovati_预计2026年中国分布式传感器市场规模有多大
07_08 常用组合逻辑电路结构——为IC设计的延时估计铺垫_基4布斯算法代码-程序员宅基地
文章浏览阅读1.1k次,点赞2次,收藏12次。常用组合逻辑电路结构——为IC设计的延时估计铺垫学习目的:估计模块间的delay,确保写的代码的timing 综合能给到多少HZ,以满足需求!_基4布斯算法代码
OpenAI Manager助手(基于SpringBoot和Vue)_chatgpt网页版-程序员宅基地
文章浏览阅读3.3k次,点赞3次,收藏5次。OpenAI Manager助手(基于SpringBoot和Vue)_chatgpt网页版
随便推点
如何用《玉树芝兰》入门数据科学?-程序员宅基地
文章浏览阅读589次。链接起散落的文章,给《玉树芝兰》数据科学系列教程做个导读,帮你更为高效入门数据科学。(由于微信公众号外部链接的限制,文中的部分链接可能无法正确打开。如有需要,请点击文末的..._玉树芝兰深度学习优酷
macOS使用brew包管理器_brew清理缓存-程序员宅基地
文章浏览阅读2.1k次。macOS使用brew包管理器安装brewbrew权限修复brew常用命令Brew-cask相关命令brew serivces 相关命令brew 指南https://www.cnblogs.com/gee1k/p/10655037.html安装brew#- 该教程适用于macOS10.13以上版本#- 先安装XCode或者Command Line Tools for Xcode。Xcode可以从AppStore里下载安装,Command Line Tools for Xcode需要在终端中输入以下_brew清理缓存
【echarts没有刷新】用按钮切换echarts图表的时候,该消失的图表还在,加个key属性就解决了_echarts 怎么加key值-程序员宅基地
文章浏览阅读789次,点赞6次,收藏2次。【echarts没有刷新】用按钮切换echarts图表的时候,该消失的图表还在,加个key属性就解决了_echarts 怎么加key值
常用机器学习的模型和算法_常见机器学习模型算法整理和对应超参数表格整理-程序员宅基地
文章浏览阅读102次。本篇介绍了常用机器学习的模型和算法_常见机器学习模型算法整理和对应超参数表格整理
【Unity3d Shader】水面和岩浆效果_unity 岩浆shader-程序员宅基地
文章浏览阅读2.8k次,点赞3次,收藏18次。游戏水面特效实现方式太多。咱们这边介绍的是一最简单的UV动画(无顶点位移),整个mesh由4个顶点构成。实现了水面效果(左图),不动代码稍微修改下参数和贴图可以实现岩浆效果(右图)。有要思路是1,uv按时间去做正弦波移动2,在1的基础上加个凹凸图混合uv3,在1、2的基础上加个水流方向4,加上对雾效的支持,如没必要请自行删除雾效代码(把包含fog的几行代码删除)S..._unity 岩浆shader
广义线性模型——Logistic回归模型(1)_广义线性回归模型-程序员宅基地
文章浏览阅读5k次。广义线性模型是线性模型的扩展,它通过连接函数建立响应变量的数学期望值与线性组合的预测变量之间的关系。广义线性模型拟合的形式为:其中g(μY)是条件均值的函数(称为连接函数)。另外,你可放松Y为正态分布的假设,改为Y 服从指数分布族中的一种分布即可。设定好连接函数和概率分布后,便可以通过最大似然估计的多次迭代推导出各参数值。在大部分情况下,线性模型就可以通过一系列连续型或类别型预测变量来预测正态分布的响应变量的工作。但是,有时候我们要进行非正态因变量的分析,例如:(1)类别型.._广义线性回归模型