几种神经网络整定PID参数原理剖析及simulink案例仿真_神经网络pid-程序员宅基地
目录
3 基于RBF神经网络自适应PID Simulink仿真分析
前言
其实前面也介绍了整定PID的智能算法,如“优胜劣汰”思想的遗传算法和粒子群算法,这类智能算法的特点是:给定输入,选定目标函数进行不断寻优,最终找到一组最优参数。个人觉得这种算法的弊端在于,虽然能够得到寻得最优解,但是所谓的参数并非“动态”自适应。本篇文章介绍的神经网络自适应的特点是,实时在线进行动态寻优,并且参数是变化的。
可能这里叙述这么多,初学者觉得还是一头雾水,接下来作者将通过仿真分析,依次介绍单神经元、BP神经网络、RBF神经网络整定PID的方法,其实其他的神经网络或者控制器以及参数都可按照类似思想进行构建。
网上也有大量类似文章并附有有源程序,但是其实很多都是内容得不到相应结果,或者是纯m语言的仿真,不适合普及仿真分析,所以再思用simulink模型进行仿真分析测试神经网络整定参数的效果。作者也是刚学习完这部分内容,有高见还望读者指出,谢谢理解!
1 基于单神经元自适应PID Simulink仿真分析
1.1 原理简介
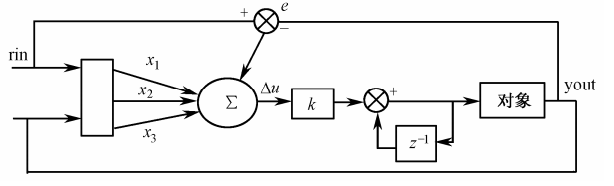
单神经元自适应PID原理框架
上图中:
①x1、x2、x3为PID的离散形式变量,这里以增量式PID为例,即x1=e;x2=e-e_1;x3=e-2e_1+e_2。
![]()
②K为神经原比例系数,K>0,值得说明一下K的选择:K越大,响应越快,单超量增大,甚至可能导致系统不稳定,当系统存在延时环节时,K必须减小以保证系统稳定性。
单神经元的具有结构简单,且有一点自适应能力的特点,也是神经网络的基本框架衍生,对于初学者学习是很友好的,所以也有典型的几种学习规则,顾名思义,就是权重学习方法进行分支,下面先简单介绍一下:
1.1.1 无监督的Hebb学习
学习规则:
![]()
式中:wij为神经元i和神经元j的连接权值,oi和oj表示神经元i、j的激活值,η为学习速率。
无监督的Hebb学习的自适应PID算法:

![]()
![]()
![]()
![]()
x1、x2、x3为增量式PID的变量,即:
![]()
![]()
![]()
1.1.2 有监督的Delta学习
学习规则:
![]()
相比无监督的Hebb学习,其实就是将oj替换成目标输出dj与实际输出oj之差。
有监督的Delta学习自适应PID算法:

![]()
![]()
![]()
![]()
注:有监督的Hebb学习规则类似,只不过权值中不包含xi误差变量。
1.1.3 有监督的Hebb学习
学习规则:
![]()
其实就是将无监督的Hebb学习规则和有监督的Delta学习规则结合构成有监督的Hebb学习规则。
有监督的Hebb学习自适应PID算法:

![]()
![]()
![]()
x1、x2、x3为增量式PID的变量,即:
![]()
![]()
![]()
1.1.4 改进的有监督Hebb学习
学习规则和有监督的Hebb一样,只不过将权值中的误差变量x替换成e+Δe(k)。
改进的有监督Hebb学习自适应PID算法:
![]()
![]()
![]()
权值中的PID变量xi为:
![]()
1.1.5 总结
有点烟花缭乱,但其实就是权值的学习规则差异,再简明点即权值公式小差异,汇总一下 :

1.2 simulink仿真分析
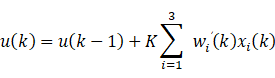
对于simulink这边个人喜欢用s函数去编写模型和控制器,这样更为简介,所以编写程序前先要进行框架构建,考虑一个问题:是否需要状态变量?
个人觉得有3种方法:
①选择wi为离散状态变量;
②不需要状态变量,设定局部或全局状态变量,相当于内部循环;
③不需要状态变量,利用延时模块得到前一时刻的信息进行编写。
结果差异肯定会有一些,但其实过程大同小异!下面我都将进行编写仿真分析,但是由于编写方式不一样,所以参数调节也不一样,故效果仅供参考。
仿真模型:
1.2.1 将权值作为状态变量仿真分析

1.2.2 利用局部变量定义权值仿真分析

1.2.3 利用延时模块仿真分析

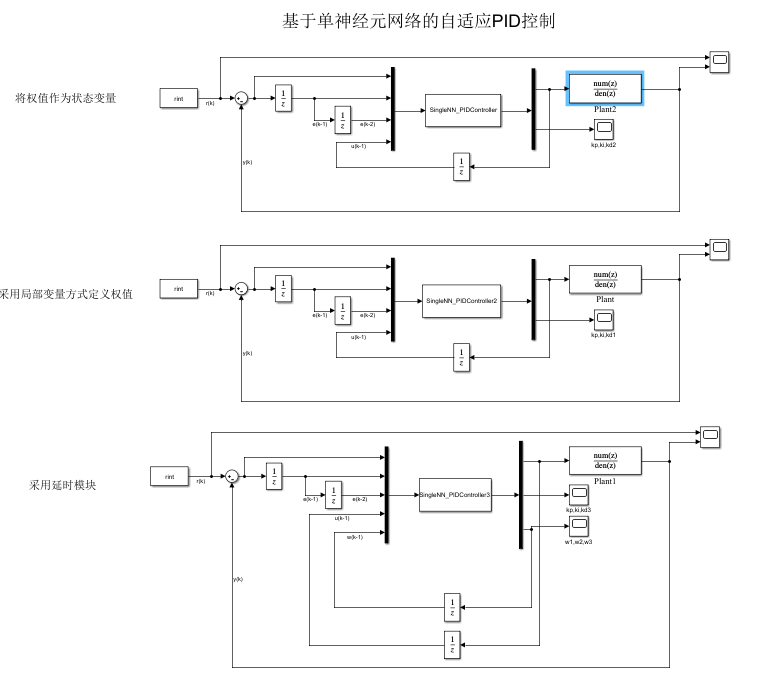
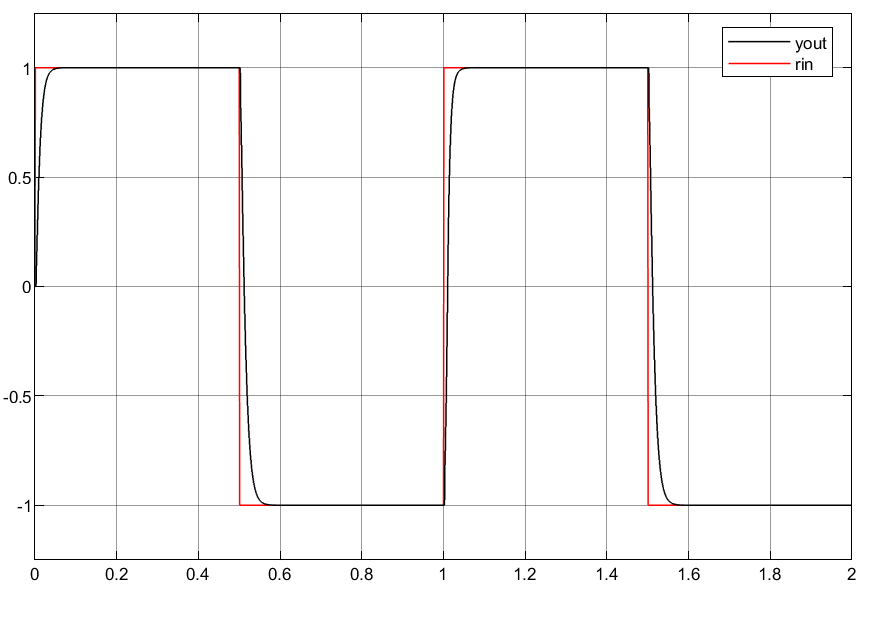
1.2.4 仿真小结
①可以看到利用延时模块的搭建控制器参数自适应更为缓和;
②实际中利用状态变量搭建控制器系统更为稳定以及简洁。
2 基于BP神经网络自适应PID Simulink仿真分析
2.1 原理简介
BP神经网络全称是前向传播神经网络,又名反向传播神经网络,一般由3层网络组成:输入层、隐含层(隐层)、输出层。

BP网络结构
下面分别对基于BP网络与PID结合算法:
①输入层:
![]()
其中,j=1,2....M表示输入变量的个数,数量取决于控制系统复杂度。
②隐层:

式中,上标(1)、(2)代表输入层、隐层;f为激活函数,可选为sigmoid函数中的tanh(x)
![]()
③输出层:
既然是输出,那就需要定义何时输出最优值,所以定义性能指标E=e^2.

式中,由于PID参数一般为非负数,所以激活函数g选取为非负的sigmoid函数:
![]()
![]() 为输出层惯性项,用于快速收敛得到性能函数极小值:
为输出层惯性项,用于快速收敛得到性能函数极小值:

式中,η为学习速率,α为惯性系数。
由于输入就是选取变量,所以没什么好说的,最终得到隐层和输出层学习算法分别为:
隐层权值学习算法:
![]()

![]()
式中,Q为输出层数,这里即优化PID参数,选为3。
注:可以看到隐层惯性项中存在δ3,所以算法编写中要先编写输出层。
输出层权值学习算法:
![]()

2.2 仿真分析
同样可以用以上3中方法进行离散控制器搭建,但是由于权重维度原因,不建议采用状态变量搭建,所以本文用局部变量和延时模块两种方法进行搭建控制器,并且为了对比结果,还是采用同1中模型和跟踪函数,方便进行比对。
仿真模型:

2.2.1 利用局部变量定义权值仿真分析



2.2.2 利用延时模块仿真分析



2.1.3 仿真小结
①不知道什么原因,调了几分钟,总是产生超调,但是换一个模型时又不会;
②反而比单层神经元结果更差,但是换个模型还是不错的;
③可以看到,控制器编写的方法不同,虽然控制器优化的参数会有差异,但是得到的控制输入大小和趋势相同。
3 基于RBF神经网络自适应PID Simulink仿真分析
3.1 原理简介
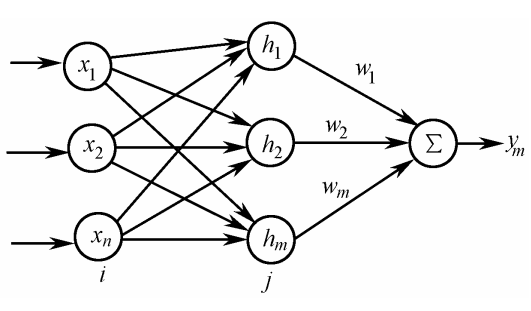
RBF网络结构
RBF神经网络全称径向基函数神经网络,它的逼近能力很强,但实际上训练能力不如BP神经网络,也是很多场合用BP网络做训练的原因所在。
RBF网络也是一种3层网络,输入映射是非线性的,常用高斯基函数作为非线性映射函数。

式中,X=[x1,x2,...xn]为网络输入向量, Cj=[c1,c2,...cm]为网络中心节点向量。
而隐层到输出层映射是线性的,这也从原理上大致说明其逼近能力强的特点,且避免局部极小值问题。
做如下向量定义:
H=[h1,h2,...,hm]'为RBF网络径向基向量;
B=[b1,b2,...,bm]'为RBF网络的基宽向量;
W=[w1,w2,....,wm]'为RBF网络的权向量。
所以RBF网络的输出为:y=W'*H=w1*h1+w2*h2+....wm*hm
权向量W、基宽向量B和中心节点向量C的的学习算法采用梯度下降法:
![]()
![]()
![]()
![]()
![]()
式中,η为学习速率;α为动量因子,可以理解为补偿作用。
雅可比矩阵:
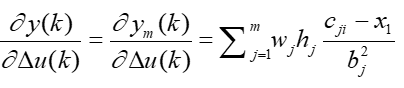
式中,x1=Δu(k);雅可比矩阵决定了输出相对控制输入的灵敏度,求取雅可比矩阵的过程即融合了RBF网络输出的线性映射,所以可以理解为网络的辨识输出。
本文将RBF网络应用于整定PID控制参数上,所以相应的PID参数学习算法为:

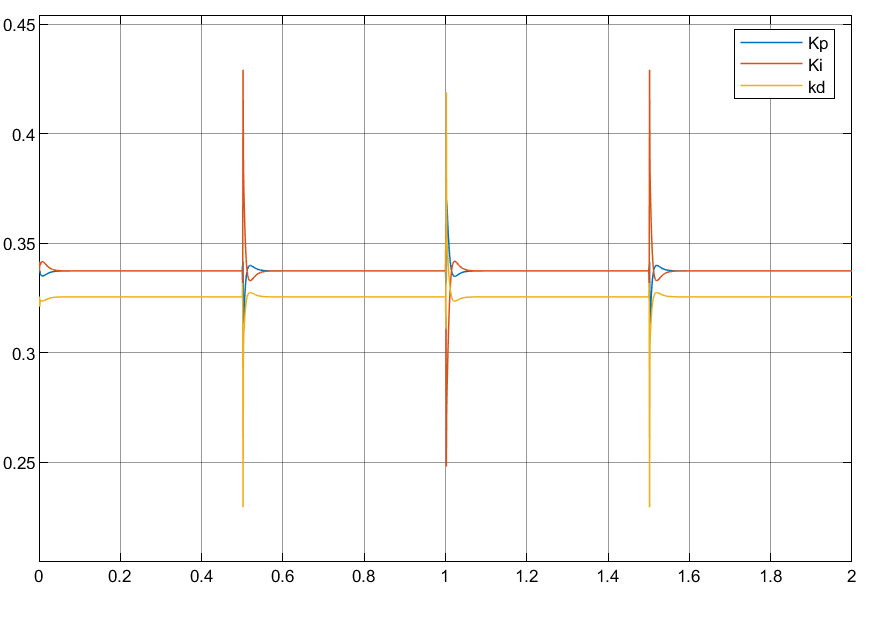
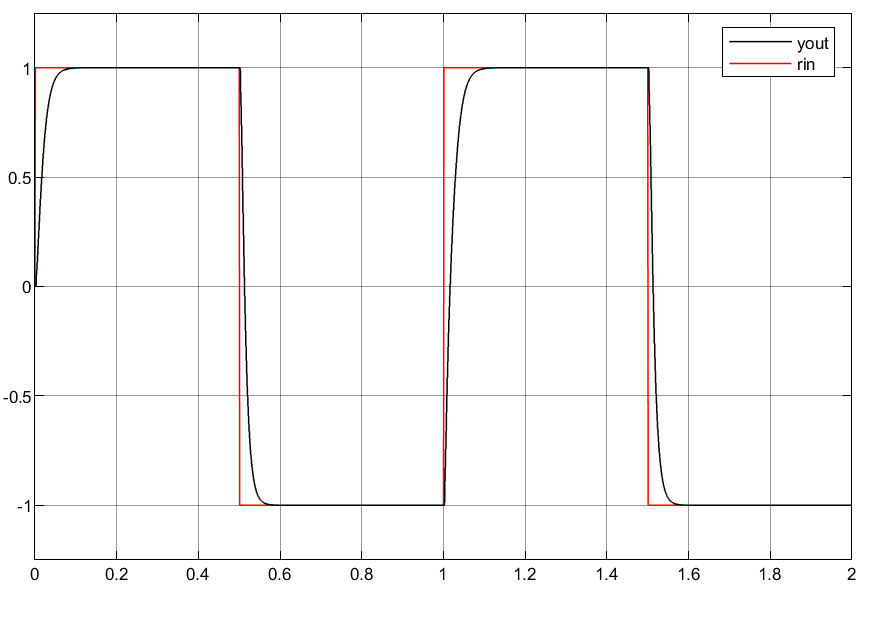
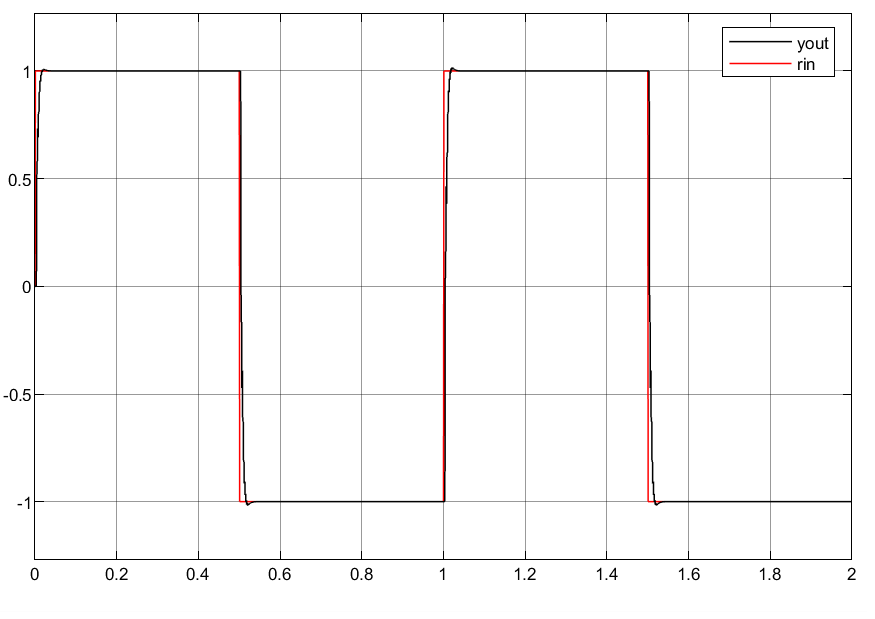
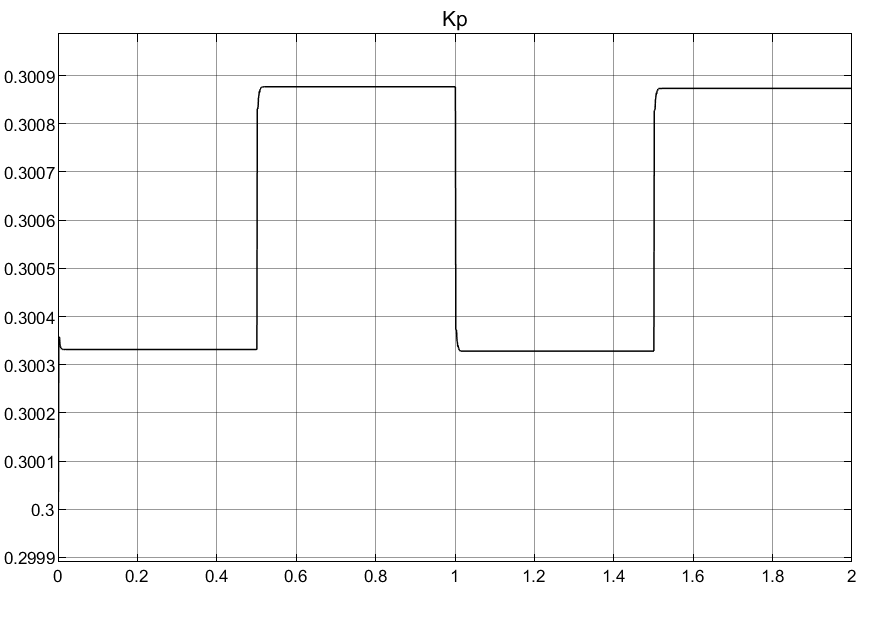
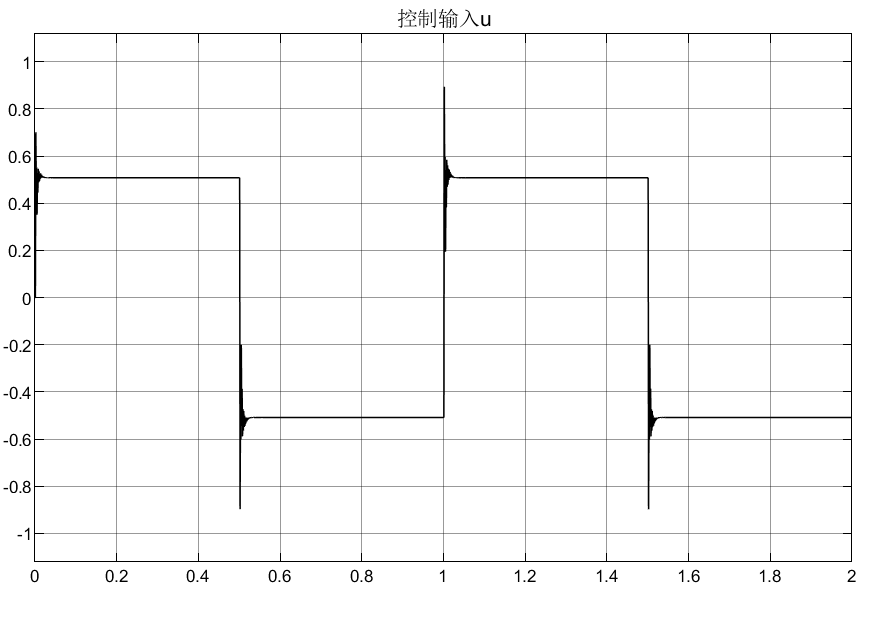
3.2 仿真分析
同理,仍选用与单神经元、BP神经网络相同的目标轨迹和模型,仍采用延时模块和局部/全局变量两种方式编写控制器,所建立的simulink模型展示如下:

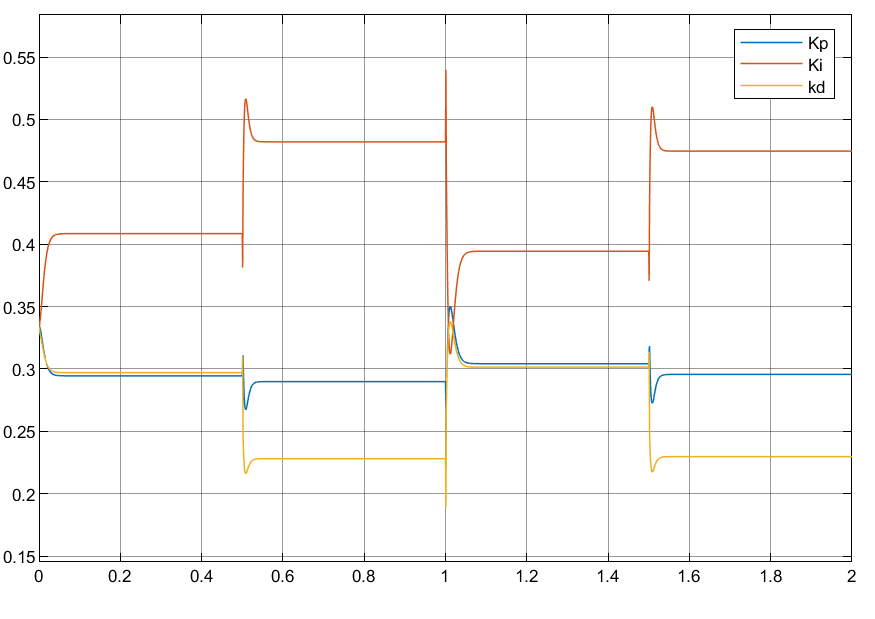
3.2.1 采用局部/全局变量方法


3.2.2 采用延时模块方法
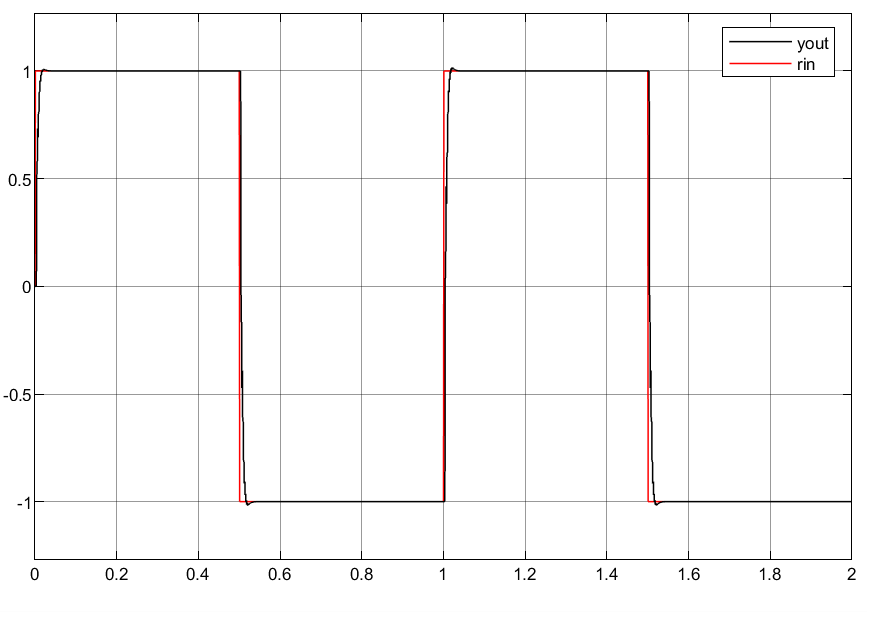
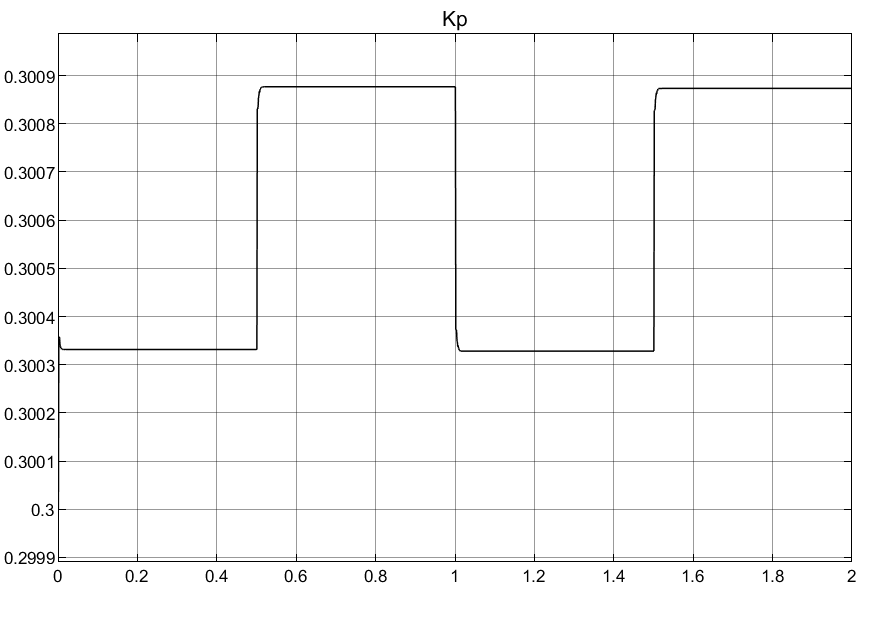
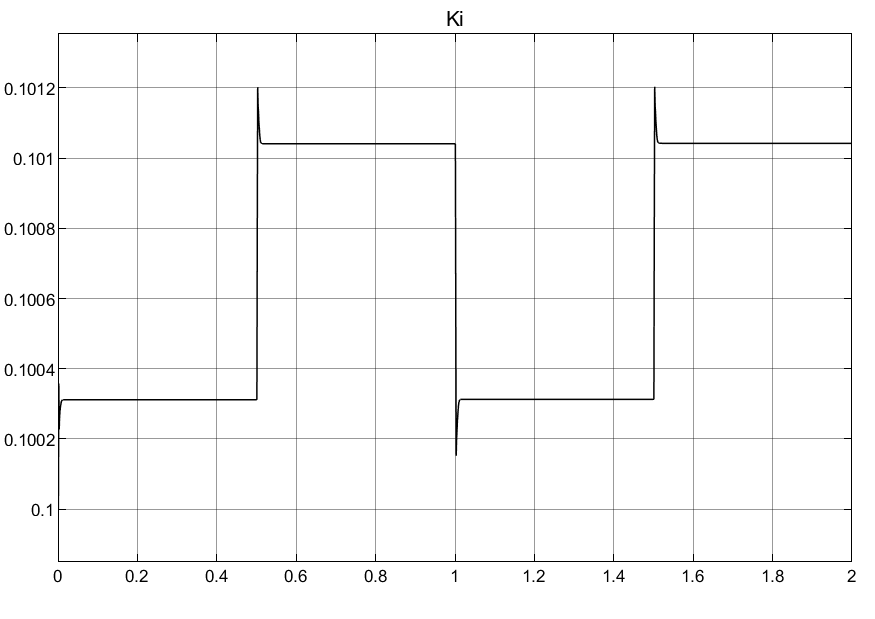
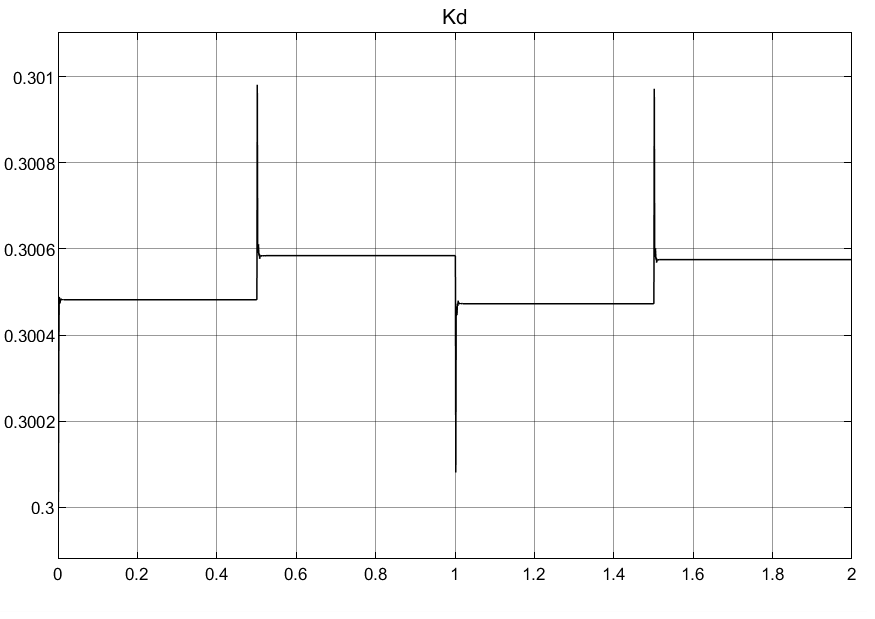

3.2.3 仿真小结
①RBF的网络对于PID参数的初值选取以及权重选取都很重要;
②两种建模方法的结果有较大差异。
4.学习问题
(1) 基于BP神经网络的控制器,由于激活函数的原因,导致PID参数只能在0-1范围,如何解决,有高手请评论区点播一些谢谢!
(2) 输入向量的选择非常重要,此外涉及的维度关系问题很是关键!
智能推荐
稀疏编码的数学基础与理论分析-程序员宅基地
文章浏览阅读290次,点赞8次,收藏10次。1.背景介绍稀疏编码是一种用于处理稀疏数据的编码技术,其主要应用于信息传输、存储和处理等领域。稀疏数据是指数据中大部分元素为零或近似于零的数据,例如文本、图像、音频、视频等。稀疏编码的核心思想是将稀疏数据表示为非零元素和它们对应的位置信息,从而减少存储空间和计算复杂度。稀疏编码的研究起源于1990年代,随着大数据时代的到来,稀疏编码技术的应用范围和影响力不断扩大。目前,稀疏编码已经成为计算...
EasyGBS国标流媒体服务器GB28181国标方案安装使用文档-程序员宅基地
文章浏览阅读217次。EasyGBS - GB28181 国标方案安装使用文档下载安装包下载,正式使用需商业授权, 功能一致在线演示在线API架构图EasySIPCMSSIP 中心信令服务, 单节点, 自带一个 Redis Server, 随 EasySIPCMS 自启动, 不需要手动运行EasySIPSMSSIP 流媒体服务, 根..._easygbs-windows-2.6.0-23042316使用文档
【Web】记录巅峰极客2023 BabyURL题目复现——Jackson原生链_原生jackson 反序列化链子-程序员宅基地
文章浏览阅读1.2k次,点赞27次,收藏7次。2023巅峰极客 BabyURL之前AliyunCTF Bypassit I这题考查了这样一条链子:其实就是Jackson的原生反序列化利用今天复现的这题也是大同小异,一起来整一下。_原生jackson 反序列化链子
一文搞懂SpringCloud,详解干货,做好笔记_spring cloud-程序员宅基地
文章浏览阅读734次,点赞9次,收藏7次。微服务架构简单的说就是将单体应用进一步拆分,拆分成更小的服务,每个服务都是一个可以独立运行的项目。这么多小服务,如何管理他们?(服务治理 注册中心[服务注册 发现 剔除])这么多小服务,他们之间如何通讯?这么多小服务,客户端怎么访问他们?(网关)这么多小服务,一旦出现问题了,应该如何自处理?(容错)这么多小服务,一旦出现问题了,应该如何排错?(链路追踪)对于上面的问题,是任何一个微服务设计者都不能绕过去的,因此大部分的微服务产品都针对每一个问题提供了相应的组件来解决它们。_spring cloud
Js实现图片点击切换与轮播-程序员宅基地
文章浏览阅读5.9k次,点赞6次,收藏20次。Js实现图片点击切换与轮播图片点击切换<!DOCTYPE html><html> <head> <meta charset="UTF-8"> <title></title> <script type="text/ja..._点击图片进行轮播图切换
tensorflow-gpu版本安装教程(过程详细)_tensorflow gpu版本安装-程序员宅基地
文章浏览阅读10w+次,点赞245次,收藏1.5k次。在开始安装前,如果你的电脑装过tensorflow,请先把他们卸载干净,包括依赖的包(tensorflow-estimator、tensorboard、tensorflow、keras-applications、keras-preprocessing),不然后续安装了tensorflow-gpu可能会出现找不到cuda的问题。cuda、cudnn。..._tensorflow gpu版本安装
随便推点
物联网时代 权限滥用漏洞的攻击及防御-程序员宅基地
文章浏览阅读243次。0x00 简介权限滥用漏洞一般归类于逻辑问题,是指服务端功能开放过多或权限限制不严格,导致攻击者可以通过直接或间接调用的方式达到攻击效果。随着物联网时代的到来,这种漏洞已经屡见不鲜,各种漏洞组合利用也是千奇百怪、五花八门,这里总结漏洞是为了更好地应对和预防,如有不妥之处还请业内人士多多指教。0x01 背景2014年4月,在比特币飞涨的时代某网站曾经..._使用物联网漏洞的使用者
Visual Odometry and Depth Calculation--Epipolar Geometry--Direct Method--PnP_normalized plane coordinates-程序员宅基地
文章浏览阅读786次。A. Epipolar geometry and triangulationThe epipolar geometry mainly adopts the feature point method, such as SIFT, SURF and ORB, etc. to obtain the feature points corresponding to two frames of images. As shown in Figure 1, let the first image be and th_normalized plane coordinates
开放信息抽取(OIE)系统(三)-- 第二代开放信息抽取系统(人工规则, rule-based, 先抽取关系)_语义角色增强的关系抽取-程序员宅基地
文章浏览阅读708次,点赞2次,收藏3次。开放信息抽取(OIE)系统(三)-- 第二代开放信息抽取系统(人工规则, rule-based, 先关系再实体)一.第二代开放信息抽取系统背景 第一代开放信息抽取系统(Open Information Extraction, OIE, learning-based, 自学习, 先抽取实体)通常抽取大量冗余信息,为了消除这些冗余信息,诞生了第二代开放信息抽取系统。二.第二代开放信息抽取系统历史第二代开放信息抽取系统着眼于解决第一代系统的三大问题: 大量非信息性提取(即省略关键信息的提取)、_语义角色增强的关系抽取
10个顶尖响应式HTML5网页_html欢迎页面-程序员宅基地
文章浏览阅读1.1w次,点赞6次,收藏51次。快速完成网页设计,10个顶尖响应式HTML5网页模板助你一臂之力为了寻找一个优质的网页模板,网页设计师和开发者往往可能会花上大半天的时间。不过幸运的是,现在的网页设计师和开发人员已经开始共享HTML5,Bootstrap和CSS3中的免费网页模板资源。鉴于网站模板的灵活性和强大的功能,现在广大设计师和开发者对html5网站的实际需求日益增长。为了造福大众,Mockplus的小伙伴整理了2018年最..._html欢迎页面
计算机二级 考试科目,2018全国计算机等级考试调整,一、二级都增加了考试科目...-程序员宅基地
文章浏览阅读282次。原标题:2018全国计算机等级考试调整,一、二级都增加了考试科目全国计算机等级考试将于9月15-17日举行。在备考的最后冲刺阶段,小编为大家整理了今年新公布的全国计算机等级考试调整方案,希望对备考的小伙伴有所帮助,快随小编往下看吧!从2018年3月开始,全国计算机等级考试实施2018版考试大纲,并按新体系开考各个考试级别。具体调整内容如下:一、考试级别及科目1.一级新增“网络安全素质教育”科目(代..._计算机二级增报科目什么意思
conan简单使用_apt install conan-程序员宅基地
文章浏览阅读240次。conan简单使用。_apt install conan