FreeRTOS移植详解-程序员宅基地
前言
在裸机开发中,我们的程序往往都是写在while(1)的死循环里面,程序的执行顺序是依次从上到下执行的。假设我们while(1)死循环里面有A、B、C三个任务,如下图所示。三个任务依次执行,那么在执行的过程中就存在这么一种现象。下面举几个例子说明这个现象
- 如果此时A在执行任务,那么B和C就会堵塞,B必须等到A执行完才能执行,C更惨,得等到B执行完后才能执行;
- 如果此时B在执行任务,那么A和C就会堵塞,C必须等到B执行完才能执行,A风水轮流转,现在轮到它最惨了,它必须得等到C执行完后才能执行;
- 如果此时C在执行任务,这时候就轮到A等C执行完成,而轮到B最惨了。
那有没有办法,让A、B、C同时执行,或者我不想按照A、B、C这个顺序循环去执行,我想根据实际需求动态去调节这些任务的顺序呢?答案是有的。RTOS(Real Time Operating System)就可以很好的解决上述问题(对于多个任务同时执行问题实际上还是有先后的,只不过因为每个任务等待时间很短,看起来就像同时执行,这一点利用极限的思想就可以很好理解这个问题了)。
1. FreeRTOS源码初探
RTOS系统有很多,我们这里用的是FreeRTOS。我们直奔主题,这里我们是要在STM32F103C8T6单片机中,将LED点灯程序改成FreeRTOS下发任务完成。我们将尽可能详细的展示具体的实现过程。
1.1 获取FreeRTOS源代码
这里推荐FreeRTOS官方网站下载。FreeRTOS官方网站:https://www.freertos.org/
- 进入官网,点击Download FreeRTOS

- 点击Download(浏览器自动翻译成中文了)

这里我们下载最新的版本。如果不想下载最新版本,可以在 GitHub 下载早期版本。
1.2 FreeRTOS系统源码内容
下载打开后,文件夹里面的内容如下图所示。文件夹中几个关键的文件具体描述为:
- FreeRTOS:FreeRTOS内核
- FreeRTOS-Plus:FreeRTOS组件
- tools:相关工具
- GitHub-FreeRTOS-Home:FreeRTOS的GitHub仓库链接
- Quick_Start_Guide:FreeRTOS快速入门官方指导手册
- Upgrading-to-FreeRTOS:升级到指定FreeRTOS版本官方文档链接
- History:FreeRTOS历史更新记录

一般来说FreeRTOS有2种移植方式,一种是直接在官方给出Demo中编写自己业务需求代码,一种是将FreeRTOS内核相关文件移植到自己已有的项目中。入门的话,建议采用第一种,这里我们用的是第二种。将FreeRTOS内核相关文件移植到我们的项目中。
1.3 FreeRTOS文件夹内容
不管采用上面哪一种方法,和我们切相关的是FreeRTOS内核,也即FreeRTOS系统内核文件夹里的内容。以Keil工具下STM32F103芯片为例,它的FreeRTOS的目录如下:

2 FreeRTOS移植
2.1 移植准备
-
准备一个工程模板(这里为自制的LED点亮模板)。
-
将FreeRTOS文件夹中的Source文件夹复制到工程模板并改名为FreeRTOS。
-
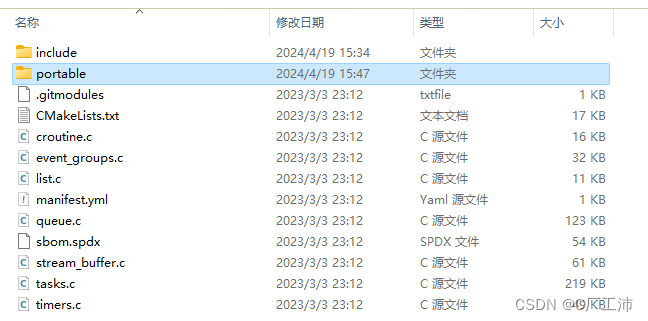
portable文件夹中只保留keil、MemMang和RVDS这三个文件夹,其他的都可以删除,其他用不到,为了简化,将不需要的删掉。
-
其实keil文件也可以删除,他们放的txt只是起引导作用,让我们去看RVDS文件夹。MemMang里面放的是内存管理文件。具体想知道各文件的功能,可以参考韦东山的书,其他被删除的文件也可以自行查询其用途。
-
由于我们的STM32103是M3内核,所以RVDS文件夹我们只保留要用的ARM_CM3文件夹即可,将其他删除。

-
去FreeRTOS—>Demo—>CORTEX_STM32F103_Keil中复制FreeRTOSConfig.h文件。

-
将其粘贴至工程文件所在的include文件夹中,顾名思义,FreeRTOSConfig.h文件是用来配置FreeRTOS系统的。

2.2开始移植
Step 1:打开基础工程,创建FreeRTOS_core和FreeRTOS_port文件。

Step 2:将FreeRTOS所有.c文件添加进FreeRTOS_core。将FreeRTOS—>portable—>RVDS—>ARM_CM3的中port.c文件添加进FreeRTOS_port;将FreeRTOS—>portable—>MemMang中的heap_4.c(管理内存的文件,每个文件的用法,可以去看相关文献)文件添加进FreeRTOS_port。添加完后如下图所示。

Step 3:添加对应的头文件路径,这里用到两个,如下图所示。

Step 4:修改FreeRTOSConfig.h文件,在其中添加以下几行
#define vPortSVCHandler SVC_Handler
#define xPortPendSVHandler PendSV_Handler
#define xPortSysTickHandler SysTick_Handler

这么做的目的是更改底层映射函数(此步也可以通过其他方式完成,但此方法较为简单)。其中vPortSVCHandler,xPortPendSVHandler和xPortSysTickHandler是在port.c文件里面定义的。SVC_Handler,PendSV_Handler和SysTick_Handler在startup_stm32f10x_md.s文件里面进行了定义。这里我们需在stm32f10x_it.c中将这三个函数注释掉。如

否则程序会卡死在下图所示的位置,大家可以自行实验一下。

Step 5:添加需要用到的头文件
/* Scheduler includes. */
#include "FreeRTOS.h"
#include "task.h"
#include "queue.h"
Step 6:添加时钟代码,没有配置时钟,系统将无法运行
static void prvSetupHardware( void )
{
/* Start with the clocks in their expected state. */
RCC_DeInit();
/* Enable HSE (high speed external clock). */
RCC_HSEConfig( RCC_HSE_ON );
/* Wait till HSE is ready. */
while( RCC_GetFlagStatus( RCC_FLAG_HSERDY ) == RESET )
{
}
/* 2 wait states required on the flash. */
*( ( unsigned long * ) 0x40022000 ) = 0x02;
/* HCLK = SYSCLK */
RCC_HCLKConfig( RCC_SYSCLK_Div1 );
/* PCLK2 = HCLK */
RCC_PCLK2Config( RCC_HCLK_Div1 );
/* PCLK1 = HCLK/2 */
RCC_PCLK1Config( RCC_HCLK_Div2 );
/* PLLCLK = 8MHz * 9 = 72 MHz. */
RCC_PLLConfig( RCC_PLLSource_HSE_Div1, RCC_PLLMul_9 );
/* Enable PLL. */
RCC_PLLCmd( ENABLE );
/* Wait till PLL is ready. */
while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET)
{
}
/* Select PLL as system clock source. */
RCC_SYSCLKConfig( RCC_SYSCLKSource_PLLCLK );
/* Wait till PLL is used as system clock source. */
while( RCC_GetSYSCLKSource() != 0x08 )
{
}
/* Enable GPIOA, GPIOB, GPIOC, GPIOD, GPIOE and AFIO clocks */
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB |RCC_APB2Periph_GPIOC
| RCC_APB2Periph_GPIOD | RCC_APB2Periph_GPIOE | RCC_APB2Periph_AFIO, ENABLE );
/* SPI2 Periph clock enable */
RCC_APB1PeriphClockCmd( RCC_APB1Periph_SPI2, ENABLE );
/* Set the Vector Table base address at 0x08000000 */
NVIC_SetVectorTable( NVIC_VectTab_FLASH, 0x0 );
NVIC_PriorityGroupConfig( NVIC_PriorityGroup_4 );
/* Configure HCLK clock as SysTick clock source. */
SysTick_CLKSourceConfig( SysTick_CLKSource_HCLK );
}
Step 7:编译0错误0警告,移植成功!!!

2.3 实验验证
LED灯接在PA0口。成功点亮了,真亮啊!!!

好了简单的移植就这么结束了。下面是我的main.c文件。
/*
*
* FreeRTOS移植模板—LED灯点亮
* 作者:陈小沛
* 学院:自动化学院
* 地点:广东工业大学
* 时间:2024年04月19日
* 个人博客:https://blog.csdn.net/weixin_47577143?spm=1011.2415.3001.5343
*
*/
//单片机头文件
#include "stm32f10x.h" // Device header
//硬件驱动
#include "Delay.h"
#include "LED.h"
//C库
#include <string.h>
#include <stdio.h>
/* Scheduler includes. */
#include "FreeRTOS.h"
#include "task.h"
#include "queue.h"
/*
* Configure the clocks, GPIO and other peripherals as required by the demo.
*/
static void prvSetupHardware( void );
/*
* Configures the timers and interrupts for the fast interrupt test as
* described at the top of this file.
*/
extern void vSetupTimerTest( void );
//任务1:LED灯点亮
void LED_Task1Function(void * param)
{
while (1)
{
LED1_ON();
}
}
int main(void)
{
/*------------------------------------------------模块初始化-------------------------------------------------------------------------*/
prvSetupHardware();
LED_Init(); //客厅灯(LED初始化)
/*-----------------------------------------------------------*/
/*任务创建
** xTaskCreate( vTaskCode, "NAME", STACK_SIZE, NULL, tskIDLE_PRIORITY, &xHandle )
** vTaskCode:任务函数 "NAME:任务名称 STACK_SIZE:任务堆栈大小 NULL:传递给任务函数的参数 tskIDLE_PRIORITY:任务优先级 StartTask_Handler:任务句柄
*/
xTaskCreate(LED_Task1Function, "Task1", 1000, NULL, 0, NULL);
/*-----------------------------------------------------------*/
/*开启任务调度
*启动RTOS,其实就是启动“任务管理器”,启动之后任务管理器就开始调度线程
*此时pc(程序计数器)就指向某线程的指令,开始多线程并发运行
*如果没创建多线程的话,那就只有一个线程
*/
vTaskStartScheduler();
/*-----------------------------------------------------------*/
/*由于调用了vTaskStartScheduler之后,PC就指向了线程中的指令,因此vTaskStartScheduler后面代码
*并不会被CPU执行,所以vTaskStartScheduler后的代码没有意义
*/
while (1);
}
/*-----------------------------------------------------------*/
static void prvSetupHardware( void )
{
/* Start with the clocks in their expected state. */
RCC_DeInit();
/* Enable HSE (high speed external clock). */
RCC_HSEConfig( RCC_HSE_ON );
/* Wait till HSE is ready. */
while( RCC_GetFlagStatus( RCC_FLAG_HSERDY ) == RESET )
{
}
/* 2 wait states required on the flash. */
*( ( unsigned long * ) 0x40022000 ) = 0x02;
/* HCLK = SYSCLK */
RCC_HCLKConfig( RCC_SYSCLK_Div1 );
/* PCLK2 = HCLK */
RCC_PCLK2Config( RCC_HCLK_Div1 );
/* PCLK1 = HCLK/2 */
RCC_PCLK1Config( RCC_HCLK_Div2 );
/* PLLCLK = 8MHz * 9 = 72 MHz. */
RCC_PLLConfig( RCC_PLLSource_HSE_Div1, RCC_PLLMul_9 );
/* Enable PLL. */
RCC_PLLCmd( ENABLE );
/* Wait till PLL is ready. */
while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET)
{
}
/* Select PLL as system clock source. */
RCC_SYSCLKConfig( RCC_SYSCLKSource_PLLCLK );
/* Wait till PLL is used as system clock source. */
while( RCC_GetSYSCLKSource() != 0x08 )
{
}
/* Enable GPIOA, GPIOB, GPIOC, GPIOD, GPIOE and AFIO clocks */
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB |RCC_APB2Periph_GPIOC
| RCC_APB2Periph_GPIOD | RCC_APB2Periph_GPIOE | RCC_APB2Periph_AFIO, ENABLE );
/* SPI2 Periph clock enable */
RCC_APB1PeriphClockCmd( RCC_APB1Periph_SPI2, ENABLE );
/* Set the Vector Table base address at 0x08000000 */
NVIC_SetVectorTable( NVIC_VectTab_FLASH, 0x0 );
NVIC_PriorityGroupConfig( NVIC_PriorityGroup_4 );
/* Configure HCLK clock as SysTick clock source. */
SysTick_CLKSourceConfig( SysTick_CLKSource_HCLK );
}
3. 参考资料
[1] 韦东山. FreeRTOS完全开发手册之上册—快速入门
4. 总结
以上即是本次的内容。我也是第一次使用RTOS,如有错误的,欢迎大家讨论交流。完整的代码我已经打包上传到我的博客,欢迎大家使用其作为自己的模板。当然最好是能自己建一个自己的模板,起码对移植中的bug有点了解,有利于更好理解RTOS。
智能推荐
学习Rust的第29天: cat in Rust
否则,假设提供了文件名,并且它将继续读取和打印这些文件的内容,当前将其作为注释保留。函数将命令行参数收集到字符串向量中,删除第一个参数(程序名称本身),然后。方法当前留空,可能会被实现来读取和打印指定文件的内容。方法读取由名称指定的文件的内容并将其作为 a 返回。它首先检查是否没有提供文件名,在这种情况下它调用。它检查是否没有提供文件名,在这种情况下它调用。文件名中是否存在该标志,如果存在,则调用该。文件名中是否存在该标志,如果存在,则调用该。否则,它会迭代每个文件名,使用 读取其内容。
GitHub Copilot Workspace:欢迎进入原生Copilot开发环境
一旦你对计划感到满意,你可以直接在Copilot Workspace中运行你的代码,跳入底层的GitHub Codespace,并调整所有代码更改直到你对最终结果感到满意。在去年GitHub Universe的早期展示后,今天,我们正重新想象开发者体验的本质,推出了GitHub Copilot Workspace的技术预览版:一个原生支持Copilot的开发环境。然后剩下的就是提交你的拉取请求,运行你的GitHub Actions,进行安全代码扫描,并请求你的团队成员进行人工代码审查。而且完全可以编辑……
【微机原理复试面试简答题汇总】_微机原理复试常见问题-程序员宅基地
文章浏览阅读1.2k次,点赞6次,收藏29次。提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档。_微机原理复试常见问题
vue快速入门(五十五)插槽基本用法
注释很详细,直接上代码……
Hbase 的架构详解_hbase架构-程序员宅基地
文章浏览阅读5.6k次,点赞10次,收藏19次。Hbase 作为 NoSQL 数据库的代表,属于三驾马车之一 BigTable 的对应实现,HBase 的出现很好地弥补了大数据快速查询能力的空缺。在前面咱们也有介绍过 HBase 的数据模型,感兴趣的小伙伴可以翻看下。谈谈你对HBase数据模型的认识?HBase 的核心架构由五部分组成,分别是 HBase Client、HMaster、Region Server、ZooKeeper 以及 HDFS。它的架构组成如下图所示。下面我们对 HBase 架构组成的每一部分详细介绍一下。1.HBas_hbase架构
Windows下Java环境配置教程_windows java环境配置-程序员宅基地
文章浏览阅读3.7w次,点赞171次,收藏430次。这篇博客介绍Java环境的配置,主要是安装JDK,以及path、JAVA_hOME、CLASSPAT的配置,还会介绍配置这些的原因。_windows java环境配置
随便推点
WML(Wireless Markup Language - 无线标记语言)_无线标记语言的特点-程序员宅基地
文章浏览阅读583次。WML WML(Wireless Markup Language - 无线标记语言)。它是一种从 HTML 继承而来的标记语言,但是 WML 基于 XML,因此它较 HTML 更严格。 WML 被用来创建可显示在 WAP 浏览器中的页面。用WML编写的页面被称为 DECKS。DECKS 是作为一套 CARDS 被构造的。 这种描述语言同我们常听说的HTML语言同出一家,都属于XML语言这一大_无线标记语言的特点
23种设计模式(第三章结构型模式7种)_设计模式符合-程序员宅基地
文章浏览阅读307次。结构型模式结构型模式描述如何将类或对象按某种布局组成更大的结构。它分为类结构型模式和对象结构型模式,前者采用继承机制来组织接口和类,后者釆用组合或聚合来组合对象。由于组合关系或聚合关系比继承关系耦合度低,满足“合成复用原则”,所以对象结构型模式比类结构型模式具有更大的灵活性。结构型模式分为以下 7 种:代理模式适配器模式装饰者模式桥接模式外观模式组合模式享元模式5.1 代理模式5.1.1 概述由于某些原因需要给某对象提供一个代理以控制对该对象的访问。这时,访问对象不适合或者不能_设计模式符合
链表中为何使用二级指针_链表初始化为什么要二级指针-程序员宅基地
文章浏览阅读3.6k次,点赞30次,收藏128次。本篇目录前言参数的调用方式传值调用传址调用传引用调用示例说明使用二级指针/一级指针创建链表时的对比主函数中作此调用使用二级指针创建链表使用一级指针创建链表会成功吗销毁链表时二级指针和一级指针的对比使用二级指针销毁链表使用一级指针销毁链表会成功吗总结完整代码参考来源前言在学习数据结构时,在链表初始化或者销毁链表的时候,经常使用二级指针或者一级指针的引用,这是为什么呢?同样是指向内存单元的地址,为什么就不能使用一级指针呢?使用一级指针去初始化或者是销毁链表的时候,究竟会发生什么呢?到底什么时候该用二级指针,_链表初始化为什么要二级指针
win10通过pycharm远程登录到Linux服务器,并通过matplotlib作图_pycharm连接服务绘图-程序员宅基地
文章浏览阅读3.6k次,点赞9次,收藏24次。准备工作:1.下载专业版本的Pycharm。这里为大家提供18版本的链接: https://pan.baidu.com/s/1-GYSJvUx9JoUujPfu3EPwA密码: p283 或者直接去官网下载: https://www.jetbrains.com/pycharm/download/download-thanks.html?platform=windows2.安装并..._pycharm连接服务绘图
更改 MATLAB 当前文件夹 或 将其文件夹添加到 MATLAB 路径。出错_manually add this path to the matlab path-程序员宅基地
文章浏览阅读8.7k次。更改 MATLAB 当前文件夹 或 将其文件夹添加到 MATLAB 路径。出错_manually add this path to the matlab path
iOS之UIView动画_oc uiview animate 关键帧-程序员宅基地
文章浏览阅读5.5k次。在AppStore中的应用越来越重视动画效果的使用,一个良好动画效果可以让两个状态之间平滑地过度,也可以利用动画吸引住用户的眼球_oc uiview animate 关键帧