毫米波雷达图解算法原理(基于TI雷达)_毫米波雷达算法-程序员宅基地
技术标签: 算法
毫米波雷达数据处理原理
前言
原始数据bin文件包可以由结束语下第一个链接获取
由于网上可以找到很多毫米波雷达处理的流程都是基于抽象原理讲解。所以本文章将会基于实际例子进行数据转换的说明。
小编也是刚入门毫米波雷达,如若有讲解不对的地方还请指出。
在未来的几个月里,小编将会把此次处理过程制作成为动画发布,届时将把链接附上,所以文章中如有不对的地方还请大神帮助指出。
11.17日笔记:(小编太懒了,就先不出动画了)
本篇文章基于TI AWR1642雷达生成的.bin文件数据进行说明,同样适用于其他TI系列雷达。
基础
我们将对毫米波雷达的基本参数进行说明,在后续的使用中将会涉及到它们:
(以下名词前4个由下包含至上的结构进行排列,5、6为硬件基础)
- IQ正交采样 复数形式,采样方式决定基本单位大小,正交采样为32bit即4个字节(实数16bit,2个字节,虚数16bit,2个字节)(所以读取第xx帧的时候要多乘个2);
- 采样点数 sampls ,每次脉冲的采样点数;
- 脉冲 chirps 每次脉冲即是一次发射,雷达需要发射n次脉冲以达到1帧;
- 帧数 每帧包含n次脉冲。
- 发射天线 TX发射天线数量;
- 接收天线 RX 接收天线数量;
此次文件设定采样的参数:
2 字节 IQ正交采样
256 sampls 采样点数
128 chirps 脉冲数
1 TX 发射天线
4 RX 接收天线
bin文件解读
1642SRR2m.bin文件为采样回读的文件,大小为125 MB (131,072,000 字节)。
其包含了250帧数据。
1帧解析:4字节x256samplsx128chirpsx4RXx1TX=524288字节
即524288*250=131,072,000字节
读取出的结构(实际是根据操作过程猜测的数据,咱也不知道为啥是这样的??)(目前认为极有可能是TI采用的硬件加速的独用ram有关):
实数1
实数2
虚数1
虚数2
实数3
实数4
虚数3
虚数4
…
…
…
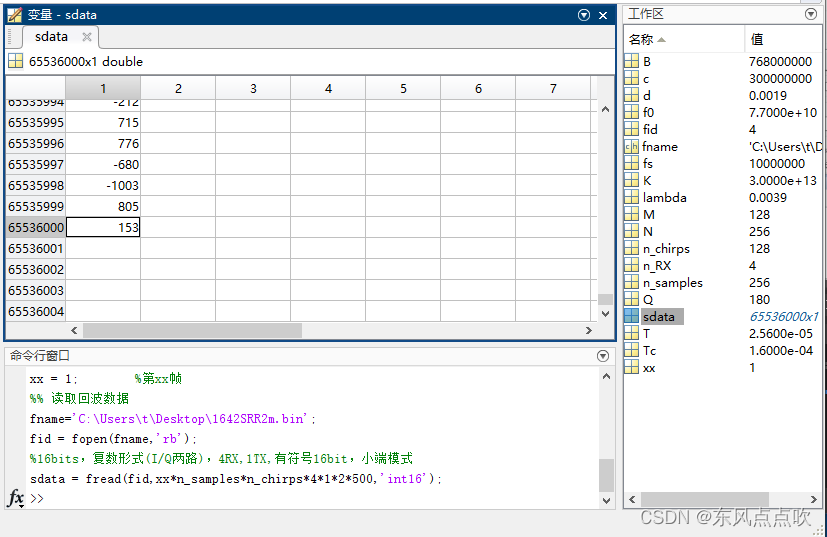
将bin文件读入到matlab中可以看到一共存在65536000行数据
1帧:524288字节(由于实数虚数的长度为16bit而不是8bit,所以每行数据的单位是16bit而不是8bit)
1帧:262144行
以下我们取1帧进行操作:
在读取出bin原始数据后和对其进行计算前需要将其转换成合适的矩阵格式以方便计算。
对数据矩阵进行操作前的转换——
由 262144行1列数据经过实数虚数结合后:
变为 1行131072列数据:

对数据进行矩阵排列,变为:chirps/TX行,samples·RX·TX列:

再变换为以发送通道作为行数的阵列(RX*TX):

最终变换(三维数组,samples行*chirp列):

开始计算结果矩阵
排列好的数据需要经过一维FFT(距离维FFT),二维FFT(速度维FFT),以及角度维FFT计算。
FFT:快速傅里叶变换
下面将以matlab语言进行展示程序
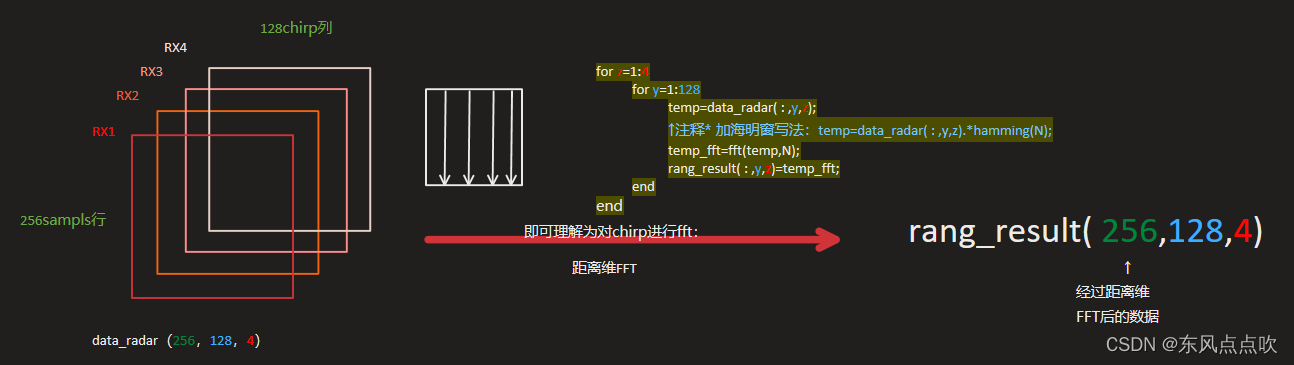
一维FFT(距离)
可以理解为对每组chirp进行FFT(个人理解):
N为FFT点数,取N=sampls。
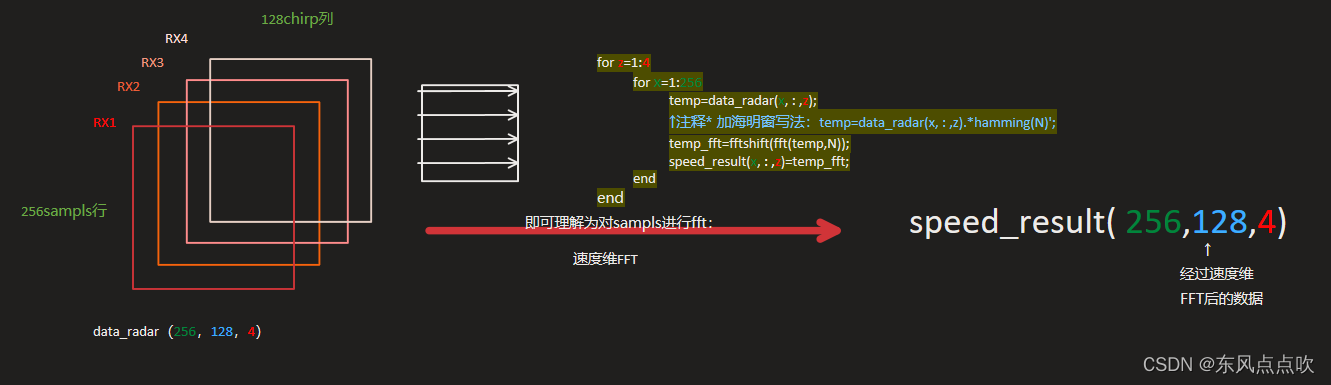
二维FFT(速度)
可以理解为对每组sampls进行FFT(个人理解):
N为FFT点数,取N=chirp。
fft_shift:将零频点移动到频谱中央(因为速度存在正负)
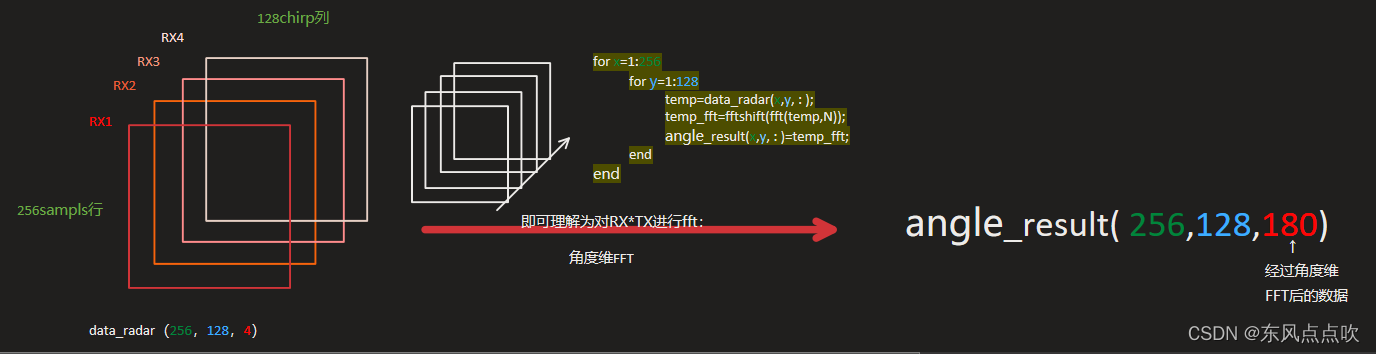
角度维FFT
可以理解为对每组RX*TX通道进行FFT(个人理解):
N为FFT点数,取N=180。
fft_shift:将零频点移动到频谱中央(因为角度存在正负)
(假设利用结果已经获取目标)对目标进行计算,得出距离速度角度信息
已知获得的目标位置[row,col,pag](可以利用峰值计算单个目标,可以利用CFAR计算多个目标)
以下参数为用户雷达设定的参数,全部已知(部分参数请参 照参考文章1 代码部分)
fb = ((row-1) × fs)/N; %差拍频率 fs:采样率/N:一维FFT点数
fd = (col-M/2-1)/(M × Tc); %多普勒频率 M:二维FFT点数/Tc:chirp总周期
fw = (pag-Q/2-1)/Q; %空间频率 Q:角度FFT点数
R = c × (fb-fd)/2/K; %距离公式 ****
v = lambda × fd/2; %速度公式 lambda:波长
theta = asin(fw × lambda/d); %角度公式 d:天线阵列间距
angle = theta × 180/pi;
得出:
目标距离:R m
目标速度:v m/s
目标角度:angle °
结束
参考文章:
1.回波3DFFT处理(测距、测速、测角):
此博主包含原始bin文件,需要用网盘下载。请支持博主一下
2.调皮连续波:TI毫米波雷达IWR6843ISK室内人员检测算法(附MATLAB程序和数据)
此博主有公众号,大家可以关注。
如有不对之处还请大家帮忙指正
1.11.17-感谢某位研究生纠正前方TX/RX搞反的情况
2.11.18-之前一维二维FFT的对象搞反了,这里请注意冒号的用法。
智能推荐
GIS与BIM融合_gis与bim融合咋来的-程序员宅基地
文章浏览阅读607次。GIS与BIM融合GIS与BIM融合GIS与BIM融合美国时间2017年11月15日,Esri和Autodesk在拉斯维加斯召开联盟发布会,正式宣布合作。通过此次合作,双方计划在BIM与GIS技术间建立桥梁,将建筑环境、自然环境、人和网络组织在一起并可视化表达,为各行各业提供更优的基础数据。两大巨头都是看准了BIM与GIS的融合的未来,其实这个问题一直都存在,这个需求一直都有,为什么直到现在都没有实现?下面有一张2014年来自FME公司对GIS背景人员针对BIM与GIS融合的调查,希望大家看完之后可_gis与bim融合咋来的
matlab图像局部放大算法_matlab 图像放大后计算原坐标-程序员宅基地
文章浏览阅读9.7k次。此代码可从https://github.com/TimeIvyace/Partial-Enlargement-of-Image.git中下载本算法简单的实现了图像局部放大的效果,算法需要确定放大区域的中心坐标点,以及放大圆形区域的半径和放大强度,来进行放大区域内的等比例放大,与美图秀秀的大眼功能类似。以人脸图像放大眼睛为例。在使用机器学习等算法得到人脸68个特征点的基础上,我们可以大致确定眼珠_matlab 图像放大后计算原坐标
数据驱动的业务智能:提高企业业务效率-程序员宅基地
文章浏览阅读800次,点赞19次,收藏22次。1.背景介绍在当今的数字时代,数据已经成为企业竞争力的重要组成部分。企业需要通过大数据技术来分析和挖掘数据,以提高企业业务效率。数据驱动的业务智能(Data-Driven Business Intelligence,简称DBI)是一种利用数据分析和挖掘来提高企业业务效率的方法。1.1 数据驱动的业务智能的概念数据驱动的业务智能是一种利用数据分析和挖掘来提高企业业务效率的方法。它的核心思...
dh css7124s,大华监控云存储部署方案-程序员宅基地
文章浏览阅读1.1k次。1 云存储1.1 产品形态一套完整云存储系统包括元数据服务器,云存储数据存储节点? 元数据服务器:DH-CSS9064X(最常见)? 云存储数据节点:最常见的型号为DH-CSS7024S-ERD,长的和EVS、NVR差不多,其它还有36盘位、48盘位DH-CSS7024S-ERD(最常见)1.2 云存储组网1.2.1 确认数据节点型号通过标签或者网口数量判断是否为直存设备:? 通过存储节点标签标注..._大华监控存储服务器如何设置 csdn网站
Win10——问题解决:此环境变量太大。此对话框允许将值设置为最长2047个字符_此环境变量太大,此对话框允许将值设置为最长2047个字符-程序员宅基地
文章浏览阅读1.2k次。解决windows下环境变量太大的问题(终极!!可用)补充:环境变量下的用户变量和系统变量的区别_此环境变量太大,此对话框允许将值设置为最长2047个字符
ubuntu18.04安装以及卸载ROS-Melodic详细教程_ubuntu 18.04删除ros-程序员宅基地
文章浏览阅读1.4w次,点赞15次,收藏155次。引言ROS (Robot Operating System, 机器人操作系统) 提供一系列程序库和工具以帮助软件开发者创建机器人应用软件。它提供了硬件抽象、设备驱动、函数库、可视化工具、消息传递和软件包管理等诸多功能。ROS遵循BSD开源许可协议。以上简介是ROS官网:http://wiki.ros.org/ 对ROS的介绍,ROS是一个机器人操作系统,通过使用ros,我们可以控制现实生活中的硬件,然后使得硬件之间根据编写的代码配合行动,做出我们想要的机器人,比如现在很火的无人驾驶汽车,也是用到ros系_ubuntu 18.04删除ros
随便推点
css 实现div垂直居中的几种方法_css垂直居中div-程序员宅基地
文章浏览阅读1.9k次。转自http://www.haorooms.com/post/css_div_juzhong前言我们都知道,固定高宽的div在网页中垂直居中很简单,相信大家也很容易的写出来,但是不是固定高宽的div如何垂直居中呢?我们在网页布局,特别是手机等web端网页经常是不固定高宽的div,那么这些div如何垂直居中呢?这篇文章,我总结一下。固定高宽div垂直居中如上图,固定高宽的很简_css垂直居中div
Vue学习笔记-问题3 - vue/multi-word-component-names 错误-程序员宅基地
文章浏览阅读1.4k次。vue/multi-word-component-names 错误_vue/multi-word-component-names
公务员常考应用文公文格式模板_公报没有落款-程序员宅基地
文章浏览阅读503次,点赞7次,收藏11次。意见:多是主观判断,具有较强的指导性 建议:多是客观判断,希望使某件事或某个人朝着好的方向完善。应用文考过:简报2、方案2、发言提纲、短评、回信、意见、编者按、推介书、公开信、倡议书、报告。用于说明自己撰写著作的目的、过程、资料来源,说明书中阐述的观点和结论,帮助理解整部著作。双方签署人身份、姓名、年月日、签署地点。6.导言/引言/绪论/摘要。2.通知/通报/报告 汇报。二:无主送机关,有落款。三:有主送机关,有落款。7.微博、短信(格式)2.公告/通告/告知。1.意见/建议/提案。_公报没有落款
配置多台服务器之间免密登录_三台服务器免密登录-程序员宅基地
文章浏览阅读628次。配置多台服务器之间ssh免密登录_三台服务器免密登录
递归与分治之Srassen矩阵乘法_设计分治算法实现矩阵乘法-程序员宅基地
文章浏览阅读302次。Srassen矩阵乘法矩阵乘法的传统做法的复杂度:O(n^3)使用分治法的方法跟处理大整数乘法的做法一致,就是拆分矩阵,最后合并。只不过这次我们是将矩阵分割为几个大小相等的子矩阵,具体如下:这里的A,B,C都代指矩阵块,而非矩阵中的元素。显然其复杂度仍然是O(n^3)为了降低复杂度我们仍选择用加法来替代乘法,只不过这次的元素将比大整数乘法中复杂得多。此时的复杂度O(n^(log7))=O(n^(2.81))据研究,目前最好的计算时间上界是O(n^2.376)..._设计分治算法实现矩阵乘法
基于小波变换DWT实现图像修复(含MSE PSNR)Matlab仿真_图像恢复的相关指标psnr-程序员宅基地
文章浏览阅读768次,点赞21次,收藏18次。图像修复是数字图像处理中的一项重要技术,它可以通过一系列算法和方法,修复损坏或受损的图像,使其恢复到原始状态。其中,小波变换DWT是一种常用的图像修复方法,它可以通过分解图像的高低频信息,对图像进行修复,并且能够保持图像的细节信息和清晰度。本文将详细介绍基于小波变换DWT实现图像修复的方法,并且介绍MSE和PSNR两种评价指标,帮助读者更好地了解图像修复的过程和效果。一、小波变换DWT小波变换DWT是一种常用的数字信号处理方法,它可以将信号分解成不同频率的子带,从而更好地分析和处理信号。_图像恢复的相关指标psnr