FreeRTOS高级篇3---FreeRTOS调度器启动过程分析_while( ( ucmaxpriorityvalue & porttop_bit_of_byte -程序员宅基地
技术标签: FreeRTOS高级篇 嵌入式
使用FreeRTOS,一个最基本的程序架构如下所示:
-
int main(
void)
-
{
-
必要的初始化工作;
-
创建任务
1;
-
创建任务
2;
-
...
-
vTaskStartScheduler();
/*启动调度器*/
-
while(
1);
-
}
任务创建完成后,静态变量指针pxCurrentTCB(见《FreeRTOS高级篇2---FreeRTOS任务创建分析》第7节内容)指向优先级最高的就绪任务。但此时任务并不能运行,因为接下来还有关键的一步:启动FreeRTOS调度器。
调度器是FreeRTOS操作系统的核心,主要负责任务切换,即找出最高优先级的就绪任务,并使之获得CPU运行权。调度器并非自动运行的,需要人为启动它。
API函数vTaskStartScheduler()用于启动调度器,它会创建一个空闲任务、初始化一些静态变量,最主要的,它会初始化系统节拍定时器并设置好相应的中断,然后启动第一个任务。这篇文章用于分析启动调度器的过程,和上一篇文章一样,启动调度器也涉及到硬件特性(比如系统节拍定时器初始化等),因此本文仍然以Cortex-M3架构为例。
启动调度器的API函数vTaskStartScheduler()的源码精简后如下所示:
-
void vTaskStartScheduler(
void )
-
{
-
BaseType_t xReturn;
-
StaticTask_t *pxIdleTaskTCBBuffer=
NULL;
-
StackType_t *pxIdleTaskStackBuffer=
NULL;
-
uint16_t usIdleTaskStackSize =tskIDLE_STACK_SIZE;
-
-
/*如果使用静态内存分配任务堆栈和任务TCB,则需要为空闲任务预先定义好任务内存和任务TCB空间*/
-
#if(configSUPPORT_STATIC_ALLOCATION == 1 )
-
{
-
vApplicationGetIdleTaskMemory( &pxIdleTaskTCBBuffer, &pxIdleTaskStackBuffer, &usIdleTaskStackSize);
-
}
-
#endif /*configSUPPORT_STATIC_ALLOCATION */
-
-
/* 创建空闲任务,使用最低优先级*/
-
xReturn =xTaskGenericCreate( prvIdleTask,
"IDLE",usIdleTaskStackSize, (
void * )
NULL, ( tskIDLE_PRIORITY | portPRIVILEGE_BIT), &xIdleTaskHandle,pxIdleTaskStackBuffer,pxIdleTaskTCBBuffer,
NULL );
-
-
if( xReturn == pdPASS )
-
{
-
/* 先关闭中断,确保节拍定时器中断不会在调用xPortStartScheduler()时或之前发生.当第一个任务启动时,会重新启动中断*/
-
portDISABLE_INTERRUPTS();
-
-
/* 初始化静态变量 */
-
xNextTaskUnblockTime = portMAX_DELAY;
-
xSchedulerRunning = pdTRUE;
-
xTickCount = ( TickType_t )
0U;
-
-
/* 如果宏configGENERATE_RUN_TIME_STATS被定义,表示使用运行时间统计功能,则下面这个宏必须被定义,用于初始化一个基础定时器/计数器.*/
-
portCONFIGURE_TIMER_FOR_RUN_TIME_STATS();
-
-
/* 设置系统节拍定时器,这与硬件特性相关,因此被放在了移植层.*/
-
if(xPortStartScheduler() != pdFALSE )
-
{
-
/* 如果调度器正确运行,则不会执行到这里,函数也不会返回*/
-
}
-
else
-
{
-
/* 仅当任务调用API函数xTaskEndScheduler()后,会执行到这里.*/
-
}
-
}
-
else
-
{
-
/* 执行到这里表示内核没有启动,可能因为堆栈空间不够 */
-
configASSERT( xReturn );
-
}
-
-
/* 预防编译器警告*/
-
(
void ) xIdleTaskHandle;
-
}
这个API函数首先创建一个空闲任务,空闲任务使用最低优先级(0级),空闲任务的任务句柄存放在静态变量xIdleTaskHandle中,可以调用API函数xTaskGetIdleTaskHandle()获得空闲任务句柄。
如果任务创建成功,则关闭中断(调度器启动结束时会再次使能中断的),初始化一些静态变量,然后调用函数xPortStartScheduler()来启动系统节拍定时器并启动第一个任务。因为设置系统节拍定时器涉及到硬件特性,因此函数xPortStartScheduler()由移植层提供,不同的硬件架构,这个函数的代码也不相同。
对于Cortex-M3架构,函数xPortStartScheduler()的实现如下所示:
-
BaseType_t xPortStartScheduler(
void )
-
{
-
#if(configASSERT_DEFINED == 1 )
-
{
-
volatile uint32_tulOriginalPriority;
-
/* 中断优先级寄存器0:IPR0 */
-
volatile uint8_t * constpucFirstUserPriorityRegister = ( uint8_t * ) (portNVIC_IP_REGISTERS_OFFSET_16 +portFIRST_USER_INTERRUPT_NUMBER );
-
volatile uint8_tucMaxPriorityValue;
-
-
/* 这一大段代码用来确定一个最高ISR优先级,在这个ISR或者更低优先级的ISR中可以安全的调用以FromISR结尾的API函数.*/
-
-
/* 保存中断优先级值,因为下面要覆写这个寄存器(IPR0) */
-
ulOriginalPriority = *pucFirstUserPriorityRegister;
-
-
/* 确定有效的优先级位个数. 首先向所有位写1,然后再读出来,由于无效的优先级位读出为0,然后数一数有多少个1,就能知道有多少位优先级.*/
-
*pucFirstUserPriorityRegister= portMAX_8_BIT_VALUE;
-
ucMaxPriorityValue = *pucFirstUserPriorityRegister;
-
-
/* 冗余代码,用来防止用户不正确的设置RTOS可屏蔽中断优先级值 */
-
ucMaxSysCallPriority =configMAX_SYSCALL_INTERRUPT_PRIORITY &ucMaxPriorityValue;
-
-
/* 计算最大优先级组值 */
-
ulMaxPRIGROUPValue =portMAX_PRIGROUP_BITS;
-
while( (ucMaxPriorityValue &portTOP_BIT_OF_BYTE ) ==portTOP_BIT_OF_BYTE )
-
{
-
ulMaxPRIGROUPValue--;
-
ucMaxPriorityValue <<= ( uint8_t )
0x01;
-
}
-
ulMaxPRIGROUPValue <<=portPRIGROUP_SHIFT;
-
ulMaxPRIGROUPValue &=portPRIORITY_GROUP_MASK;
-
-
/* 将IPR0寄存器的值复原*/
-
*pucFirstUserPriorityRegister= ulOriginalPriority;
-
}
-
#endif /*conifgASSERT_DEFINED */
-
-
/* 将PendSV和SysTick中断设置为最低优先级*/
-
portNVIC_SYSPRI2_REG |=portNVIC_PENDSV_PRI;
-
portNVIC_SYSPRI2_REG |=portNVIC_SYSTICK_PRI;
-
-
/* 启动系统节拍定时器,即SysTick定时器,初始化中断周期并使能定时器*/
-
vPortSetupTimerInterrupt();
-
-
/* 初始化临界区嵌套计数器 */
-
uxCriticalNesting =
0;
-
-
/* 启动第一个任务 */
-
prvStartFirstTask();
-
-
/* 永远不会到这里! */
-
return
0;
-
}
从源码中可以看到,开始的一大段都是冗余代码。因为Cortex-M3的中断优先级有些违反直觉:Cortex-M3中断优先级数值越大,表示优先级越低。而FreeRTOS的任务优先级则与之相反:优先级数值越大的任务,优先级越高。根据官方统计,在Cortex-M3硬件上使用FreeRTOS,绝大多数的问题都出在优先级设置不正确上。因此,为了使FreeRTOS更健壮,FreeRTOS的作者在编写Cortex-M3架构移植层代码时,特意增加了冗余代码。关于详细的Cortex-M3架构中断优先级设置,参考《FreeRTOS系列第7篇---Cortex-M内核使用FreeRTOS特别注意事项》一文。
在Cortex-M3架构中,FreeRTOS为了任务启动和任务切换使用了三个异常:SVC、PendSV和SysTick。SVC(系统服务调用)用于任务启动,有些操作系统不允许应用程序直接访问硬件,而是通过提供一些系统服务函数,通过SVC来调用;PendSV(可挂起系统调用)用于完成任务切换,它的最大特性是如果当前有优先级比它高的中断在运行,PendSV会推迟执行,直到高优先级中断执行完毕;SysTick用于产生系统节拍时钟,提供一个时间片,如果多个任务共享同一个优先级,则每次SysTick中断,下一个任务将获得一个时间片。关于详细的SVC、PendSV异常描述,推荐《Cortex-M3权威指南》一书的“异常”部分。
这里将PendSV和SysTick异常优先级设置为最低,这样任务切换不会打断某个中断服务程序,中断服务程序也不会被延迟,这样简化了设计,有利于系统稳定。
接下来调用函数vPortSetupTimerInterrupt()设置SysTick定时器中断周期并使能定时器运行这个函数比较简单,就是设置SysTick硬件的相应寄存器。
再接下来有一个关键的函数是prvStartFirstTask(),这个函数用来启动第一个任务。我们先看一下源码:
-
__
asm
void prvStartFirstTask(
void )
-
{
-
PRESERVE8
-
-
/* Cortext-M3硬件中,0xE000ED08地址处为VTOR(向量表偏移量)寄存器,存储向量表起始地址*/
-
ldr r0, =
0xE000ED08
-
ldr r0, [r0]
-
/* 取出向量表中的第一项,向量表第一项存储主堆栈指针MSP的初始值*/
-
ldr r0, [r0]
-
-
/* 将堆栈地址存入主堆栈指针 */
-
msr msp, r0
-
/* 使能全局中断*/
-
cpsie i
-
cpsie f
-
dsb
-
isb
-
/* 调用SVC启动第一个任务 */
-
svc
0
-
nop
-
nop
-
}
程序开始的几行代码用来复位主堆栈指针MSP的值,表示从此以后MSP指针被FreeRTOS接管,需要注意的是,Cortex-M3硬件的中断也使用MSP指针。之后使能中断,使用汇编指令svc 0触发SVC中断,完成启动第一个任务的工作。我们看一下SVC中断服务函数:
-
__
asm
void vPortSVCHandler(
void )
-
{
-
PRESERVE8
-
-
ldr r3, =pxCurrentTCB
/* pxCurrentTCB指向处于最高优先级的就绪任务TCB */
-
ldr r1, [r3]
/* 获取任务TCB地址 */
-
ldr r0, [r1]
/* 获取任务TCB的第一个成员,即当前堆栈栈顶pxTopOfStack */
-
ldmia r0!, {r4-r11}
/* 出栈,将寄存器r4~r11出栈 */
-
msr psp, r0
/* 最新的栈顶指针赋给线程堆栈指针PSP */
-
isb
-
mov r0, #
0
-
msr basepri, r0
-
orrr14, #
0xd
/* 这里0x0d表示:返回后进入线程模式,从进程堆栈中做出栈操作,返回Thumb状态*/
-
bx r14
-
}
通过上一篇介绍任务创建的文章,我们已经认识了指针pxCurrentTCB。这是定义在tasks.c中的唯一一个全局变量,指向处于最高优先级的就绪任务TCB。我们知道FreeRTOS的核心功能是确保处于最高优先级的就绪任务获得CPU权限,因此可以说这个指针指向的任务要么正在运行中,要么即将运行(调度器关闭),所以这个变量才被命名为pxCurrentTCB。
根据《FreeRTOS高级篇2---FreeRTOS任务创建分析》第三节我们可以知道,一个任务创建时,会将它的任务堆栈初始化的像是经过一次任务切换一样,如图1-1所示。对于Cortex-M3架构,需要依次入栈xPSR、PC、LR、R12、R3~R0、R11~R4,其中r11~R4需要人为入栈,其它寄存器由硬件自动入栈。寄存器PC被初始化为任务函数指针vTask_A,这样当某次任务切换后,任务A获得CPU控制权,任务函数vTask_A被出栈到PC寄存器,之后会执行任务A的代码;LR寄存器初始化为函数指针prvTaskExitError,这是由移植层提供的一个出错处理函数。
任务TCB结构体成员pxTopOfStack表示当前堆栈的栈顶,它指向最后一个入栈的项目,所以在图中它指向R4,TCB结构体另外一个成员pxStack表示堆栈的起始位置,所以在图中它指向堆栈的最开始处。
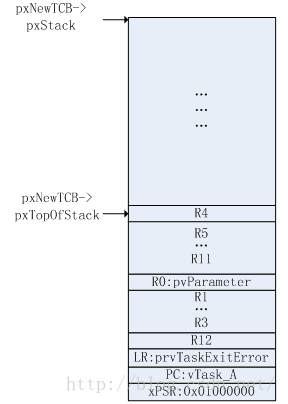
图1-1:任务创建后任务堆栈分布情况
所以,SVC中断服务函数一开始就使用全局指针pxCurrentTCB获得第一个要启动的任务TCB,从而获得任务的当前堆栈栈顶指针。先将人为入栈的寄存器R4~R11出栈,将最新的堆栈栈顶指针赋值给线程堆栈指针PSP,再取消中断掩蔽。到这里,只要发生中断,就都能够被响应了。
中断服务函数通过下面两句汇编返回。Cortex-M3架构中,r14的值决定了从异常返回的模式,这里r14最后四位按位或上0x0d,表示返回时从进程堆栈中做出栈操作、返回后进入线程模式、返回Thumb状态。
-
orr r14, #
0xd
-
bx r14
执行bx r14指令后,硬件自动将寄存器xPSR、PC、LR、R12、R3~R0出栈,这时任务A的任务函数指针vTask_A会出栈到PC指针中,从而开始执行任务A。
至此,任务vTask_A获得CPU执行权,调度器正式开始工作。
智能推荐
手把手完成智慧路灯的开发,完成设备上云【华为云IoT】_当光照值小于预设值时,调用云平台相应api,实现灯的开启;当光照值大于等于预设-程序员宅基地
文章浏览阅读4.8k次,点赞5次,收藏32次。通过智慧路灯的项目,介绍了一个物联网设备如何上云,云平台如何配置,数据可视化大屏如何对接显示的整个流程。 如果手上没有智慧路灯的硬件,也可以通过文中介绍的MQTT客户端软件,模拟设备数据进行数据上传,一样可以完成云端的所有操作。 有了可视化大屏,就可以实时查看设备的状态,本次的例子里设计的界面比较简单,如果想设计酷炫,可以查看官方的模板,在新建大屏的时候可以选择模板进行创建。_当光照值小于预设值时,调用云平台相应api,实现灯的开启;当光照值大于等于预设
Model Predictive Control-程序员宅基地
文章浏览阅读2.7k次。大量的预测控制权威性文献都无一例外地指出, 预测控制最大的吸引力在于它具有显式处理约束的能力, 这种能力来自其基于模型对系统未来动态行为的预测, 通过把约束加到未来的输入、输出或状态变量上, 可以把约束显式表示在一个在线求解的二次规划或非线性规划问题中.预测算法的三要素:内部(预测)模型、滚动优化、反馈控制。1.基于模型的预测在MPC算法中,需要一个描述对象动态行为的模型,这个模型的作用是预..._model predictive con
混合开发 Hybird Ionic Angular Cordova web 跨平台 MD-程序员宅基地
文章浏览阅读201次。Markdown版本笔记 我的GitHub首页 我的博客 我的微信 我的邮箱 MyAndroidBlogs baiqiantao baiqiantao bqt20094 [email protected]混合开发 Hybird Ionic Angular Cordova web 跨平台 MD..._> ionic integrations enable cordova [info] downloading integration cordova [
javaWeb基础之Servlet的三种实现方式以及两种配置方式_servlet需要重写什么方法-程序员宅基地
文章浏览阅读4.5k次。一、Servlet的三种实现方式Servlet(Server Applet)是Java Servlet的简称,称为小服务程序或服务连接器,用Java编写的服务器端程序,主要功能在于交互式地浏览和修改数据,生成动态Web内容。1、Servlet的第一种创建方式:继承HttpServlet(最优) 重写doGet(HttpServletRequest request, HttpS..._servlet需要重写什么方法
strlen函数以及string类使用心得_string strlen-程序员宅基地
文章浏览阅读3.1k次。复习一下strlen函数其实,给strlen函数之后它就会向下偏移统计个数,遇到当前位置字符为'\0'才会停下来。如果没有的话就有可能接着往下走下去,甚至会超过开辟空间的区域指向一片未开辟空间赋值的空间。所以服务端这边接收的buffer要比需要接收的数据大小大一点才不会在strlen的时候出现问题,因为数组里面的数据都占满了,最后一个'\0'的位置没留下来,粗心大意。函数原型..._string strlen
面试官:小伙子你来介绍一下MyBatis_spring cloud mybatis 面试项目介绍怎么说-程序员宅基地
文章浏览阅读598次。虽然目前 Spring Security 一片火热,但是 Shiro 的市场依然存在,今天我就来稍微的说一说这两个框架的,方便大家在实际项目中选择适合自己的安全管理框架。首先我要声明一点,框架无所谓好坏,关键是适合当前项目场景,作为一个年轻的程序员更不应该厚此薄彼,或者拒绝学习某一个框架。小孩子才做选择题,成年人两个都要学!所以接下来主要结合我自己的经验来说一说这两个框架的优缺点,没有提到的地方也欢迎大家留言补充。Spring Security 并非一个新生的事物,它最早不叫 Spring Security_spring cloud mybatis 面试项目介绍怎么说
随便推点
LVS负载均衡服务器搭建_lvs搭建-程序员宅基地
文章浏览阅读2k次。现在LVS已经是Linux标准内核的一部分,在Linux2.4内核以前,使用LVS时必须重新编译内核以支持LVS功能模块,但是从Linux2.4内核心之后,已经完全内置了LVS的各个功能模块,无需给内核打任何补丁,可以直接使用LVS提供的各种功能。使用LVS技术要达到的目标是:通过LVS提供的负载均衡技术和Linux操作系统实现一个高性能,高可用的服务器群集,它具有良好的可靠性、可扩展性和可操作性。从而以低廉的成本实现最优的服务性能。......_lvs搭建
数据库谓词-程序员宅基地
文章浏览阅读2.1k次,点赞3次,收藏5次。谓词:属于函数的一种,但其返回值是真值(true/false/unknown)判断是否存在满足某种条件的记录,存在返回TRUE、不存在返回FALSE。比较多用到的几种谓词:LIKEBETWEENIS NULL/IS NOT NULLINEXISTSLIKE谓词——字符串的部分一直查询(模糊查询)--MySQL--DDL:创建表CREATE TABLE SampleLike..._数据库 连接谓词是什么
论文学习笔记-MobileNet v3_mobilenetv3扩张尺寸-程序员宅基地
文章浏览阅读9.3k次,点赞5次,收藏36次。『写在前面』新一代MobileNet,性能全面提升。作者机构:Andrew Howard等,Google。文章标题:《Searching for MobileNetV3》原文链接:https://arxiv.org/abs/1905.02244v2相关repo:摘要结合网络设计和NAS技术提出新一代MobileNets; 发布了两种网络结构:MobileNetV3..._mobilenetv3扩张尺寸
2022(软考高级)信息系统项目管理师认证招生简章_山东省信息系统项目管理专业院校-程序员宅基地
文章浏览阅读331次。信息系统项目管理师是全国计算机技术与软件专业技术资格(水平)考试(简称软考)项目之一,是由国家人力资源和社会保障部、工业和信息化部共同组织的国家级考试,既属于国家职业资格考试,又是职称资格考试。信息系统项目管理师,属于软考三个级别中的“高级”。从1999年开始实施系统集成项目管理工程师/信息系统项目管理师,到目前为止,累计报名人数超过了300万人次,累计合格人数接近50万人。【报考要求】不设学历与资历条件、年龄以及专业等限制,考生可根据自己的技术水平选择合适的级别合适的资格进行报考。凡遵守中华人_山东省信息系统项目管理专业院校
python2.7实战教程_实战 - 廖雪峰 Python 2.7 中文教程-程序员宅基地
文章浏览阅读82次。看完了教程,是不是有这么一种感觉:看的时候觉得很简单,照着教程敲代码也没啥大问题。于是准备开始独立写代码,就发现不知道从哪开始下手了。这种情况是完全正常的。好比学写作文,学的时候觉得简单,写的时候就无从下笔了。虽然这个教程是面向小白的零基础Python教程,但是我们的目标不是学到60分,而是学到90分。所以,用Python写一个真正的Web App吧!目标我们设定的实战目标是一个Blog网站,包含..._python快速编程入门第二版2.7.1实训案例
神经网络是线性还是非线性,神经网络的非线性_非线性神经网络-程序员宅基地
文章浏览阅读4.5k次。BP算法的基本思想是:学习过程由信号正向传播与误差的反向回传两个部分组成;正向传播时,输入样本从输入层传入,经各隐层依次逐层处理,传向输出层,若输出层输出与期望不符,则将误差作为调整信号逐层反向回传,对神经元之间的连接权矩阵做出处理,使误差减小。经反复学习,最终使误差减小到可接受的范围。具体步骤如下:1、从训练集中取出某一样本,把信息输入网络中。2、通过各节点间的连接情况正向逐层处理后,得到神经网络的实际输出。3、计算网络实际输出与期望输出的误差。..._非线性神经网络