基于MAX7800羽毛板语音控制ESP8266小车-程序员宅基地
技术标签: 人工智能 # MAX78000 语音识别
1. 项目介绍
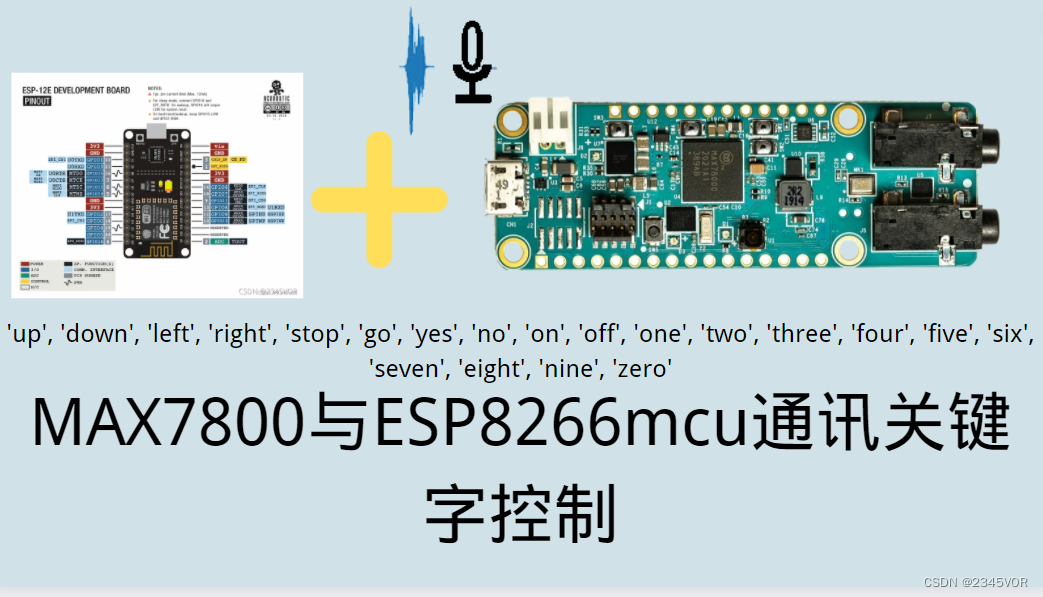
基于MAX7800羽毛板语音控制ESP8266小车
采用现成的KWS20关键词,['up', 'down', 'left', 'right', 'stop', 'go', 'yes', 'no', 'on', 'off', 'one', 'two', 'three', 'four', 'five', 'six', 'seven', 'eight', 'nine', 'zero'],进行语音关键字识别远程控制小车。
2. 项目设计思路
搭建环境《——》学习基本例程《——》熟悉基本编译下载调试功能《——》重点解析参考目标案例《——》各个模块功能调试《——》整体联调维护相关功能《——》演示总结
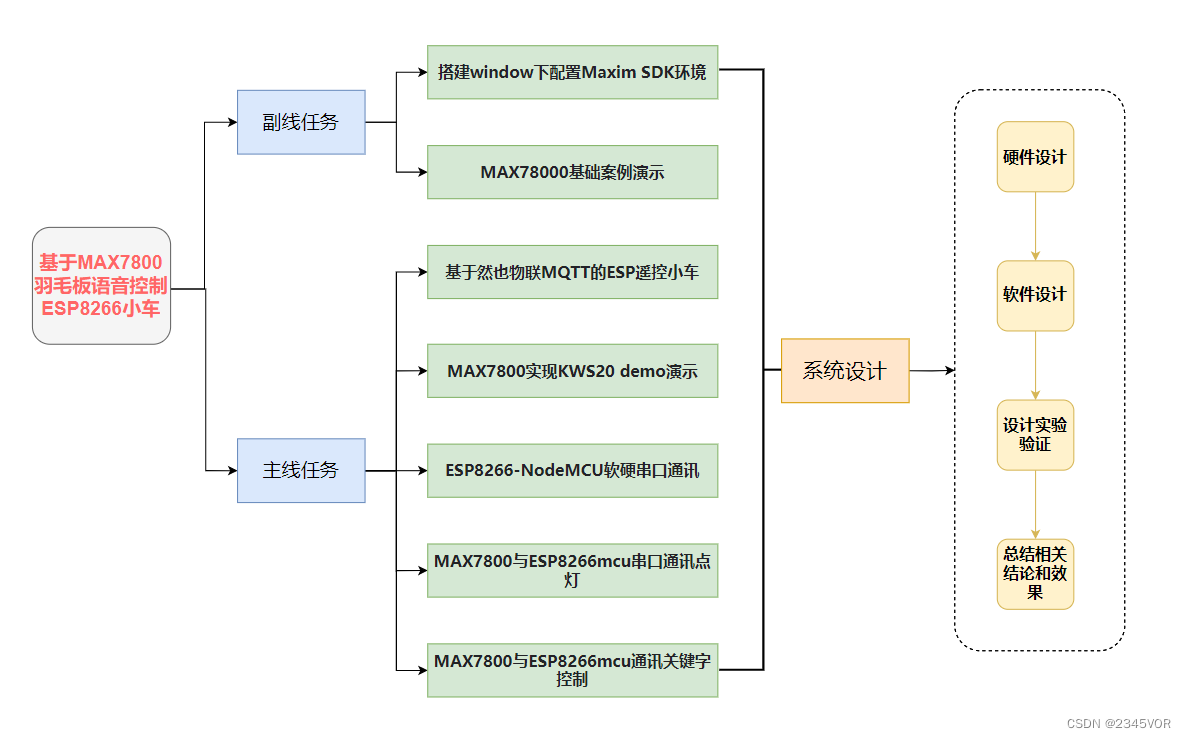
系统设计图
我们开始主线任务和副线任务吧
3. 主线任务
主线任务围绕语音关键字识别远程控制三部分展开!
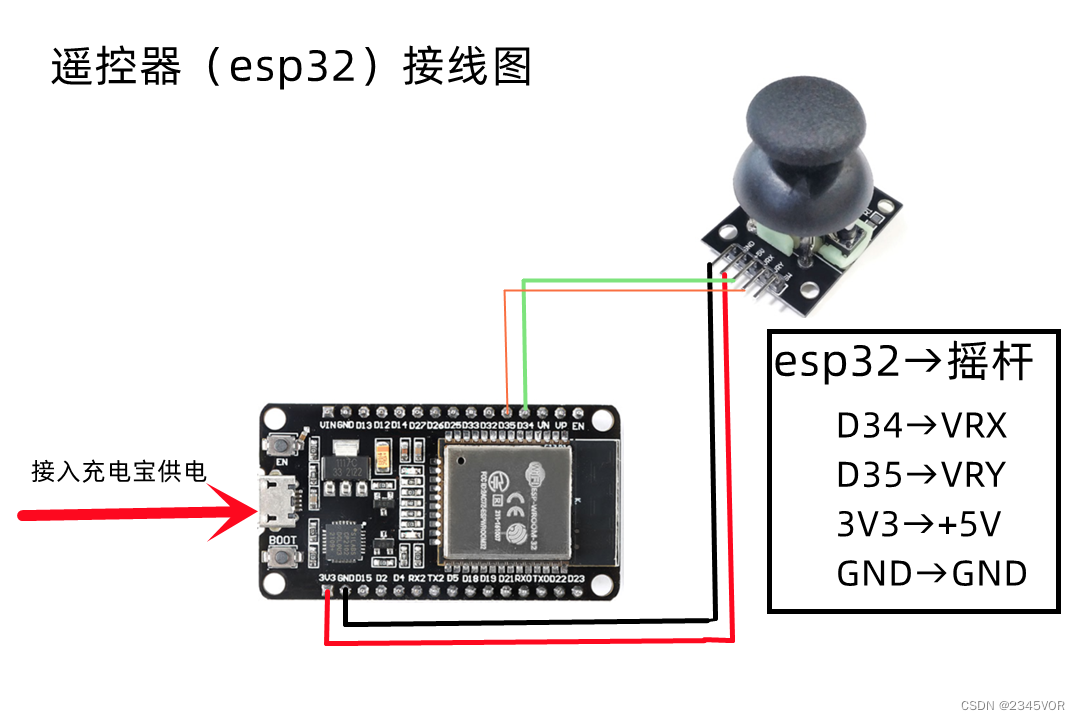
3.1 远程遥控ESP8266小车——主线1
一步一个脚印,MQTT的ESP遥控小车从原理到实现,涉及硬件电路,程序设计,然后也探讨了个人见解,希望把两个归中传感器数值传递过去,减少实验步骤,提高速成感和成就感!♂️
见项目进度主线1
- 发射机
- 接收机
- 最后效果
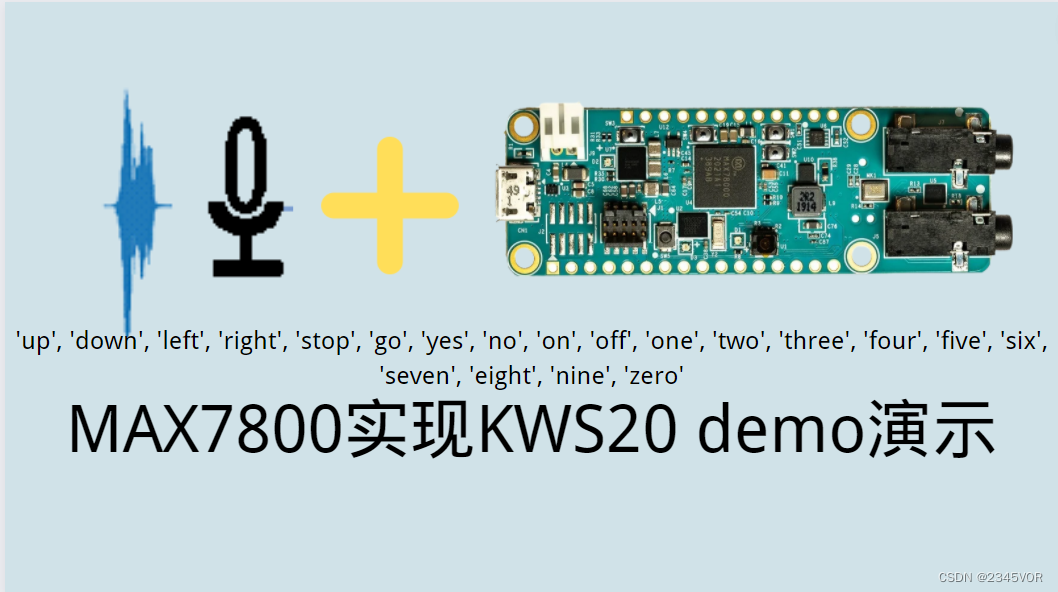
3.2 MAX7800实现KWS20 demo演示——主线2
Keyword Spotting Demo 软件演示了如何使用MAX78000 EVKIT 识别大量关键字。
KWS20 演示软件使用第二版 Google 语音命令数据集此演示使用了完整数据集中的以下 20 个关键字子集:
[‘up’, ‘down’, ‘left’, ‘right’, ‘stop’, ‘go’, ‘yes’, ‘no’, ‘on’, ‘off’, ‘one’, ‘two’, ‘three’, ‘four’, ‘five’, ‘six’, ‘seven’, ‘eight’, ‘nine’, ‘zero’]
其余关键字和无法识别的词属于“Unknown”类别,理解语音识别原理和相关神经网络代码调用。
见网址:【MAX7800实现KWS20 demo演示】_2345VOR的博客-程序员宅基地_ai8x 训练
见项目进度主线2
3.3 ESP8266-NodeMCU软硬串口通讯——主线3
本次采用ESP8266node MCU开发板,利用自身软硬件串口通讯,采用关键字符串实现开灯功能
见项目进度主线3

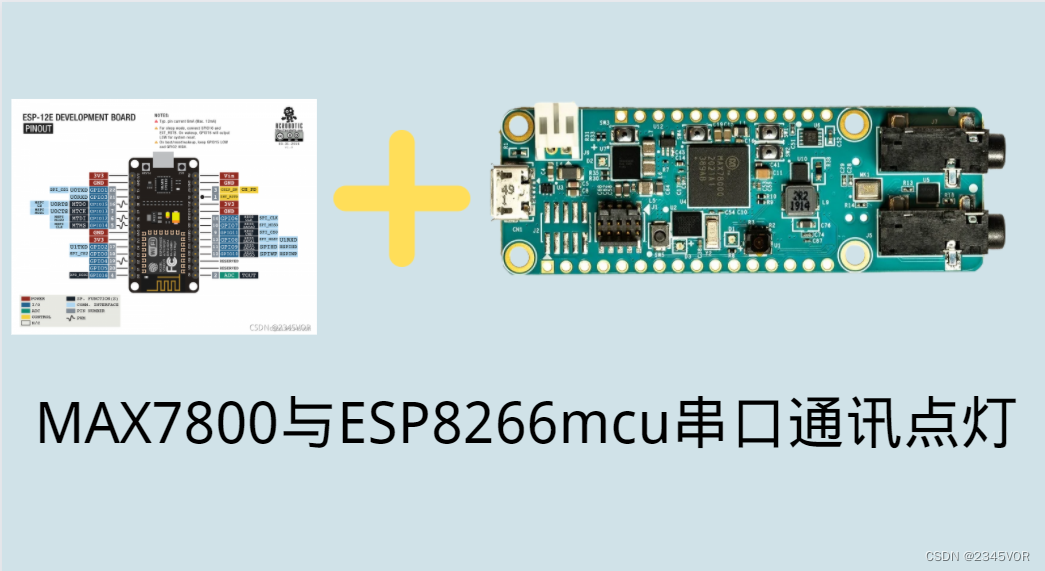
3.4 MAX7800与ESP8266mcu串口通讯点灯——主线4
前期搭好MAX7800 的eclipse和ESP82666的Arduino开发环境,现在开始慢慢实现这两者的通讯,目前MAX7800 羽毛板可以发送字符串,但是ESP8266无法连续接收,因此采用简单的单个字符的串口通讯实现点灯功能。
见项目进度主线4
3.5 MAX7800与ESP8266mcu通讯关键字控制——主线5
前期搭好MAX7800 的eclipse和ESP82666的Arduino开发环境,现在开始慢慢实现这两者的通讯,目前MAX7800 羽毛板可以发送字符串,但是ESP8266无法连续接收,因此采用简单的单个字符的串口通讯实现点灯功能,现在可以与esp8266实现KWS20关键字识别控制串口输出字符操作数。
见项目进度副线1
4. 副线任务
副线任务围绕MAX7800基础案例开发,熟悉基本语法、相关外设驱动部分展开!
4.1 搭建window下配置Maxim SDK环境——副线1
下面介绍如何在Windows下搭建Maxim SDK开发环境,我们就可以点灯,hello world啦!
见网址:【window下配置Maxim SDK环境】_2345VOR的博客-程序员宅基地_maxim sdk
见项目进度副线1
4.2 MAX78000基础案例演示——副线2
挑选ADC、GPIO、UART三个幸运的例程进行学习演示,总结项目编译下载调试开发功能,熟悉语言规范。
见网址:【MAX78000基础案例演示】_2345VOR的博客-程序员宅基地
见项目进度副线2
5. 具体实验
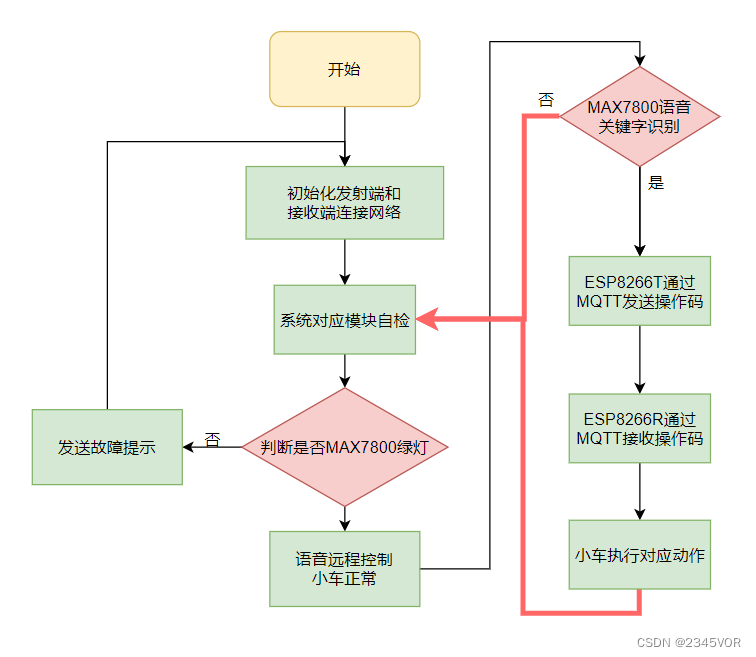
改善小车硬件结构,使羽毛板嵌入进去,设计控制逻辑程序,完成语音识别、串口驱动、关键字符解码、MQTT发送接收、设备驱动执行,程序控制流程图如下
5.1 前期构思
下面是语音关键字控制小车状态定义
5.1.1 语音匹配
['up', 'down']小车左右手部舵机状态
['left', 'right']小车左右转方向控制
['stop', 'go']小车状态控制
['yes', 'no']小车前进后退方向控制
['on', 'off']车灯控制状态
['one', 'two', 'three', 'zero']速度大小控制
['four', 'five', 'six', 'seven', 'eight', 'nine', 'unknow']无效关键字,保持小车原有状态
以上一共有15个字符MAX7800负责识别,然后发送到esp8266接收对应15个操作码。下图这是我通过MAX7800与esp8266通讯找到的,从225到339的15个操作码
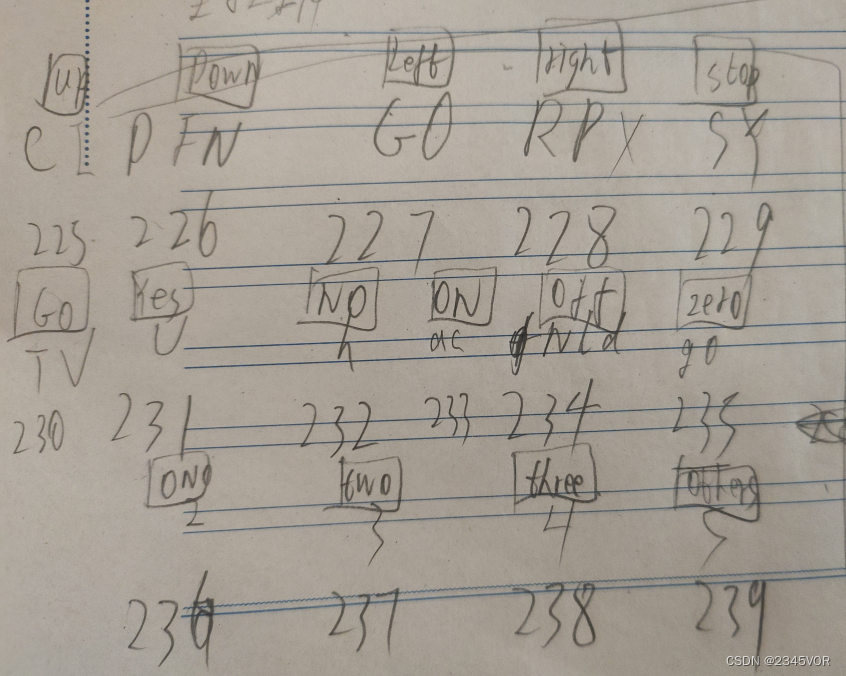
| 关键字 | up | down | left | right | stop | go | yes | no | on | off | one | two | three | zero | others |
| 字符 | CI | DFN | GO | RPX | SY | TV | U | h | ac | fnld | 2 | 3 | 4 | go | 5 |
| 操作数 | 225 | 226 | 227 | 228 | 229 | 230 | 231 | 232 | 233 | 234 | 236 | 237 | 238 | 235 | 239 |
关键代码展示
/* Set of detected words */
const char keywords[NUM_OUTPUTS][10] = { "UP", "DOWN", "LEFT", "RIGHT", "STOP", "GO",
"YES", "NO", "ON", "OFF", "ONE", "TWO",
"THREE", "FOUR", "FIVE", "SIX", "SEVEN", "EIGHT",
"NINE", "ZERO", "Unknown" };
const uint8_t TestTxData[BUFF1_SIZE]="CDGRSTUhaf234555555g5";5.1.2 操作码匹配
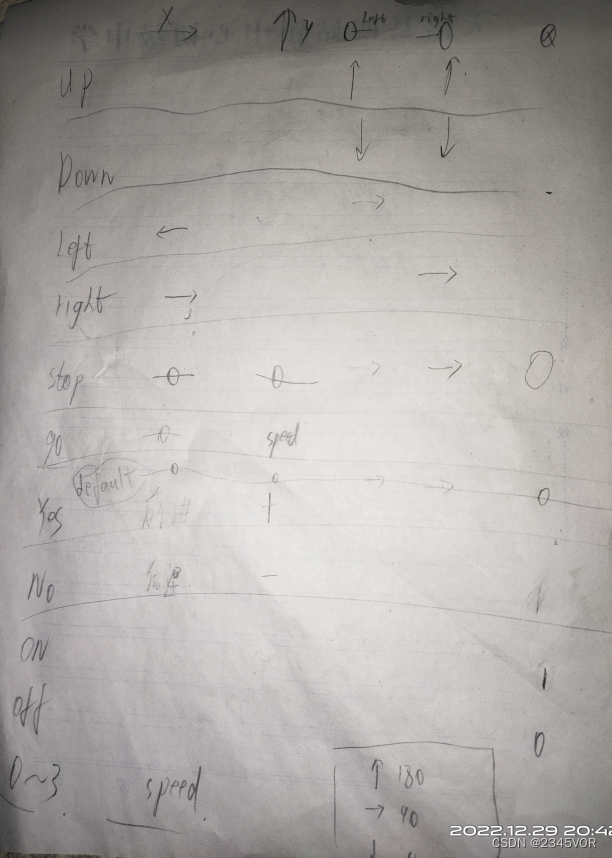
- 横坐标依次是小车关键状态
小车左右转方向,小车油门大小(有方向),左边舵机手,右边舵机手,车灯
- 纵坐标依次是语音关键字
['up', 'down', 'left', 'right', 'stop', 'go', 'yes', 'no', 'on', 'off', 'one', 'two', 'three', 'four', 'five', 'six', 'seven', 'eight', 'nine', 'zero']
下图显示小车关键状态与语音关键字一一对应关系!!!
关键代码展示
int A[4]={400,1850,3400,4200},B[6]={600,1850,3700,4200,3400,4090},C[4]={90,120,180,200},D[4]={90,60,0,200},E[4]={0,1,5,10};
int action[2][5] = {
{ A[3], B[3], C[3], D[3], E[3] },
{ A[1], B[1], C[1], D[1], E[0]}
};
int mylist[15][5] = {
{ A[3], B[3], C[2], D[2], E[3] },//up
{ A[3], B[3], C[0], D[0], E[3] },//down
{ A[0], B[3], C[1], D[2], E[3] },//left
{ A[2], B[3], C[2], D[1], E[3] },//right
{ A[1], B[1], C[1], D[1], E[0] },//stop
{ A[3], B[2], C[3], D[3], E[1] },//go
{ A[3], B[1], C[3], D[3], E[3] },//yes
{ A[3], B[0], C[3], D[3], E[3] },//no
{ A[3], B[3], C[3], D[3], E[1] },//on
{ A[3], B[3], C[3], D[3], E[0] },//off
{ A[3], B[1], C[3], D[3], E[3] },//zero
{ A[3], B[4], C[3], D[3], E[3] },//1
{ A[3], B[2], C[3], D[3], E[3] },//2
{ A[3], B[5], C[3], D[3], E[3] },//3
{ A[3], B[3], C[3], D[3], E[3] }//unknow
};5.2 硬件结构
此部分搭建系统的原理图和实物连接
原理图源码见:嘉立创EDA(标准版) - 免费、易用、强大的在线电路设计软件
5.2.1 原理图
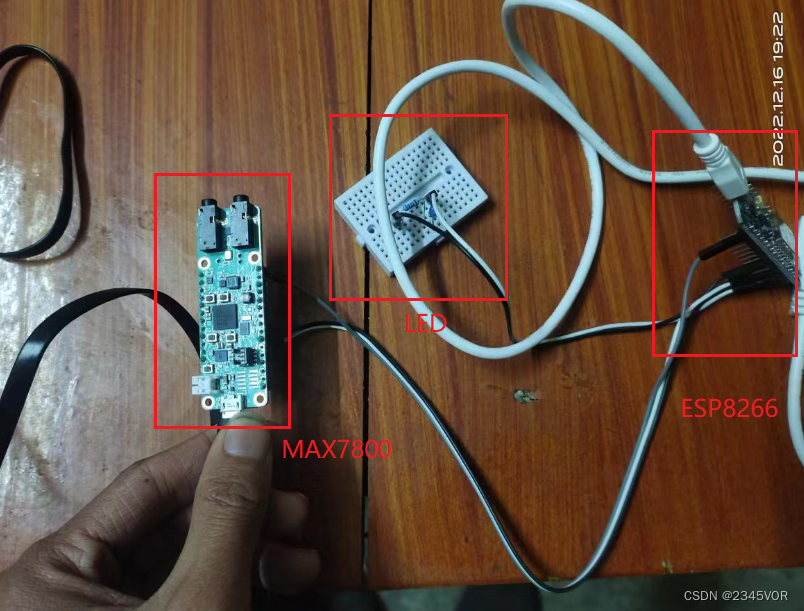
- 发射机
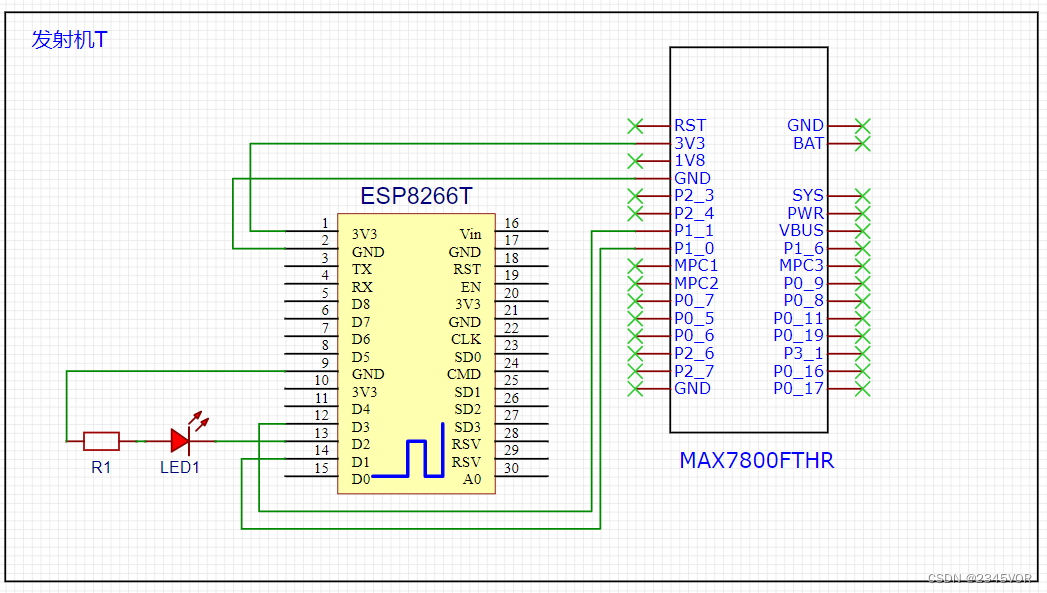
物料说明:
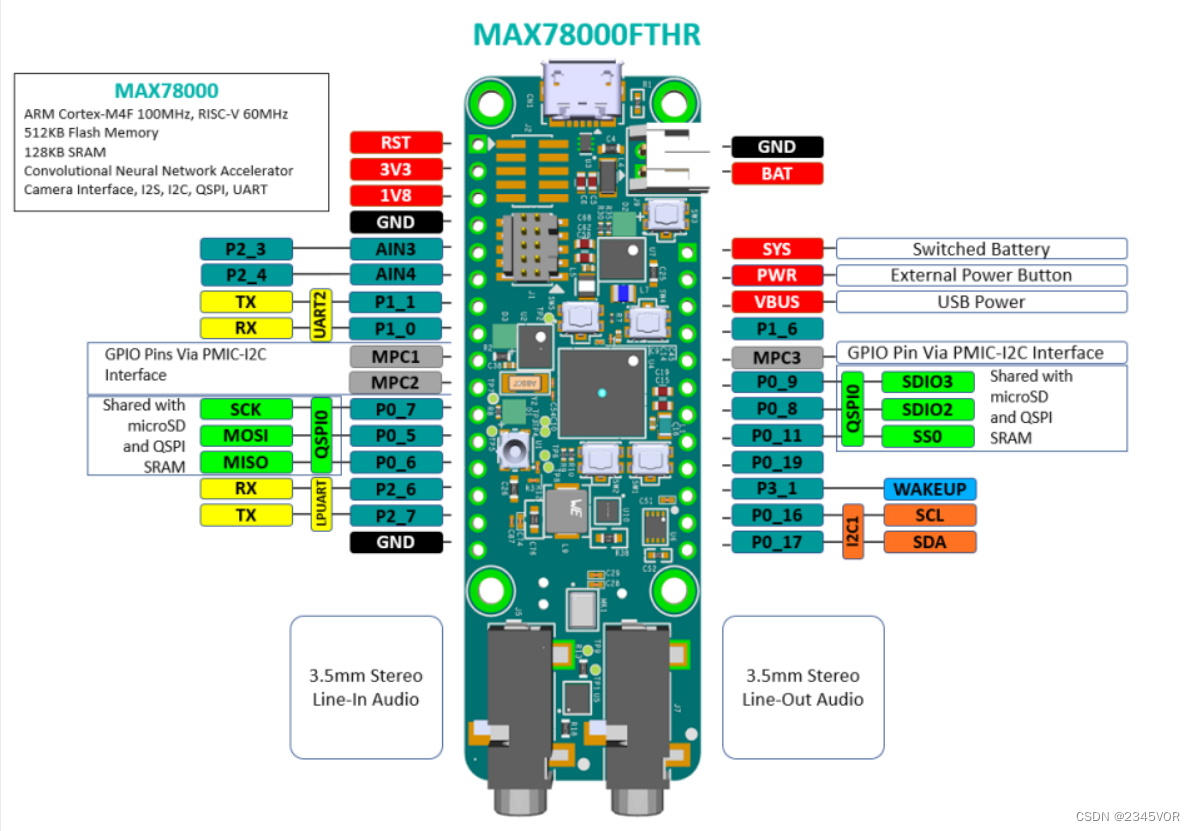
MAX7800:主控,语音识别20个关键单词,发送特定字符到esp8266,并SD卡记录,显示屏显示(没有设计TFT显示屏接线)
ESP8266T:中转器,接收MAX7800特定字符,匹配对应操作码关联小车状态参数,采用然也物联网平台使用MQTT远程传输小车状态参数指令
LED1:显示器,通过PWM驱动显示传输时的小车速度,采用亮暗程度表达

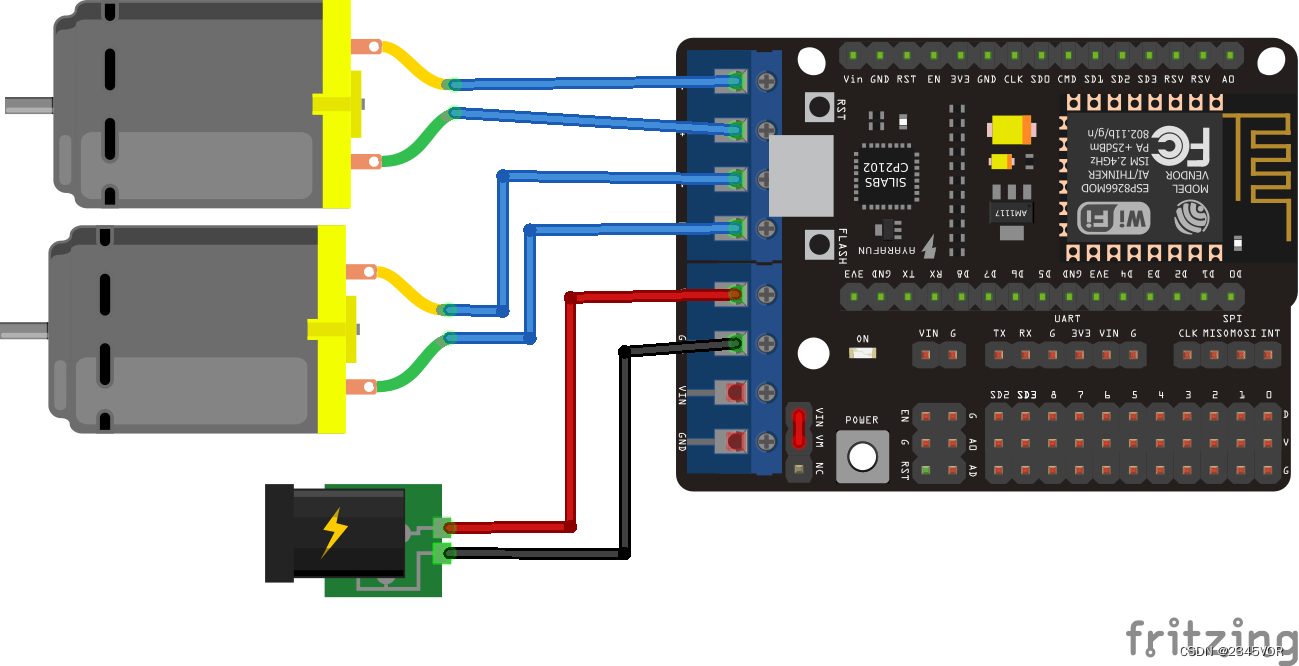
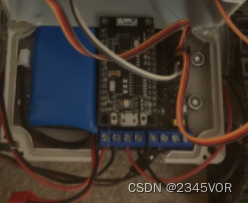
- 接收机
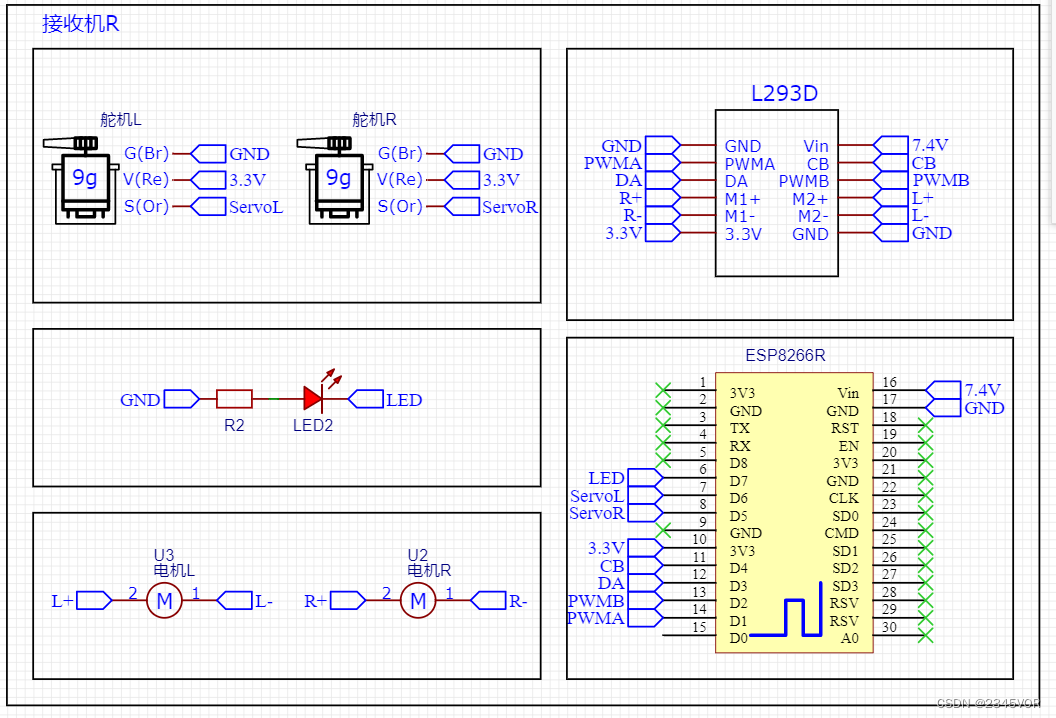
物料说明:
ESP8266:主控,采用然也物联网平台使用MQTT远程接收小车状态参数指令,下发操作码关联小车状态参数,驱动电机舵机LED
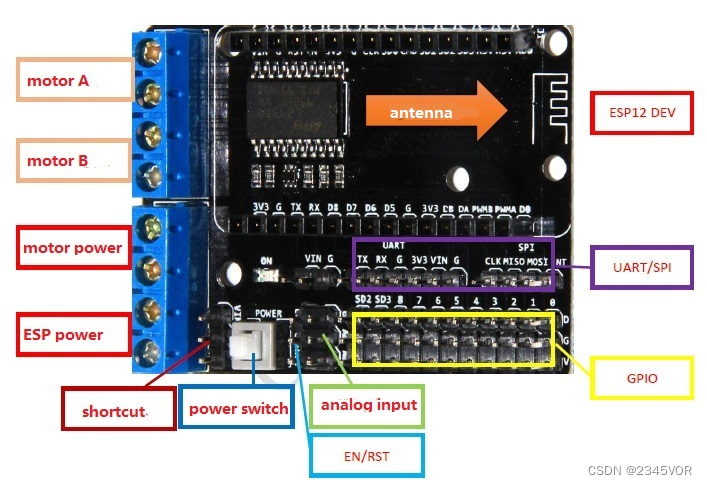
L293D:拓展驱动板,采用ESP12E 电机拓展板与 NodeMCU ESP8266 Amica 板兼容,扩展板直接放在微控制器上。电机的电源连接到 VM/GND 接线盒,电路板的电源连接到 VIN/GND 接线盒。如果电机的电源与 NodeMCU 的电源相同(<10V 最大值),则可以使用桥连接 VIN 和 VM 引脚。电机连接到接线端子 A+、A-、B+、B-。
电机R:采用TT马达减速电机,连接右边坦克链条履带结构
电机L:采用TT马达减速电机,连接左边坦克链条履带结构
舵机R:采用常见的90舵机作为右手臂
舵机L:采用常见的90舵机作为右手臂
LED2:作为车灯,电机运行时亮,可单独关键词“on,off”控制
电源:采用2S航模电池作为接收机的能量供应
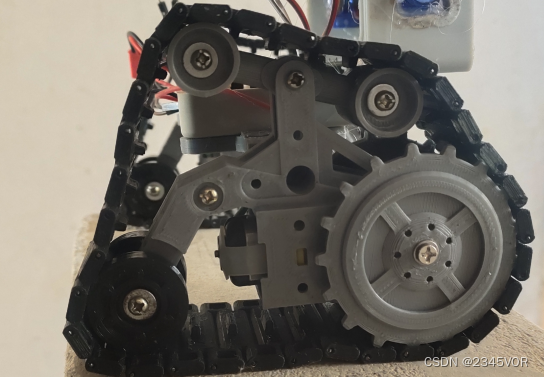



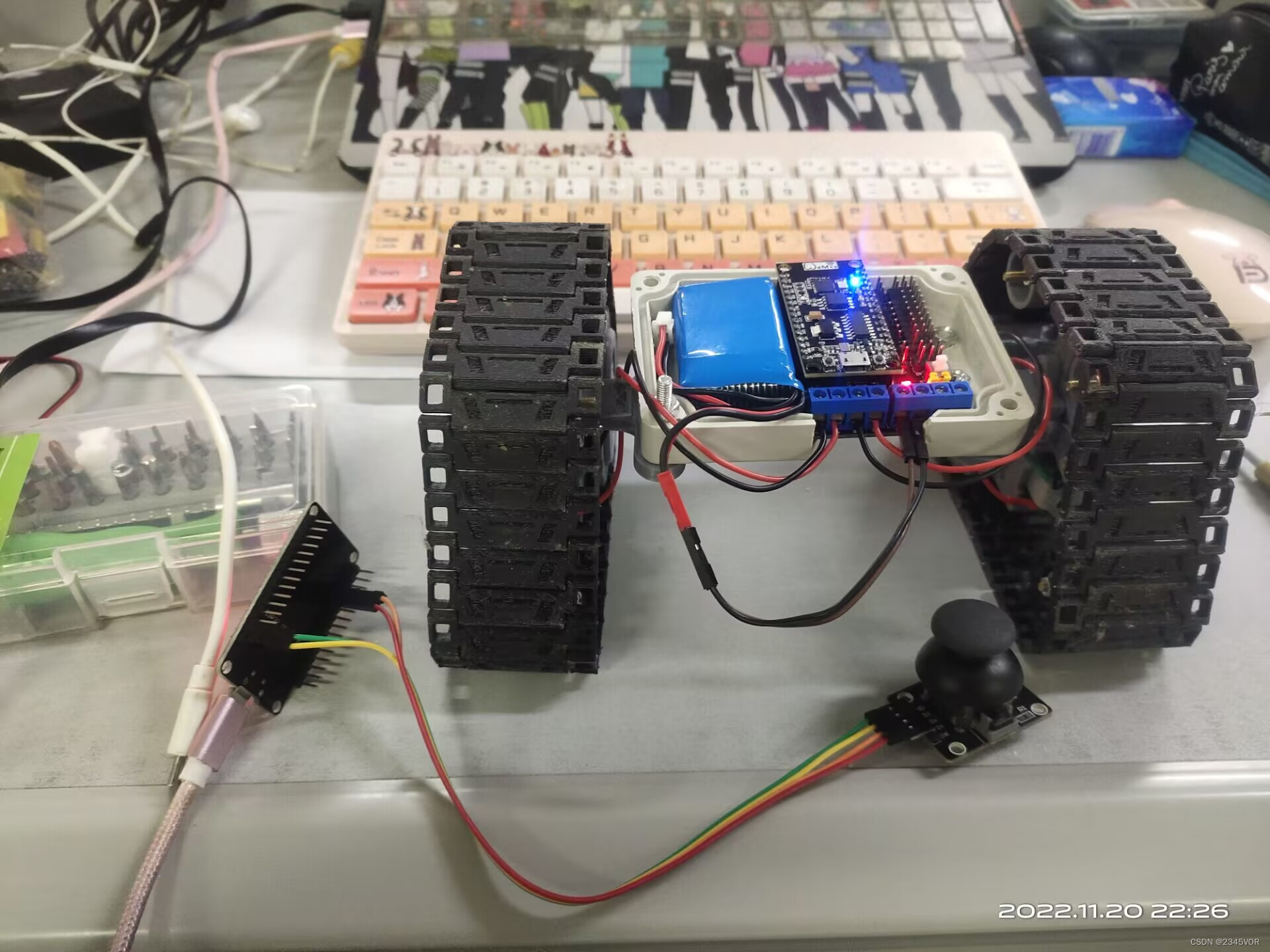
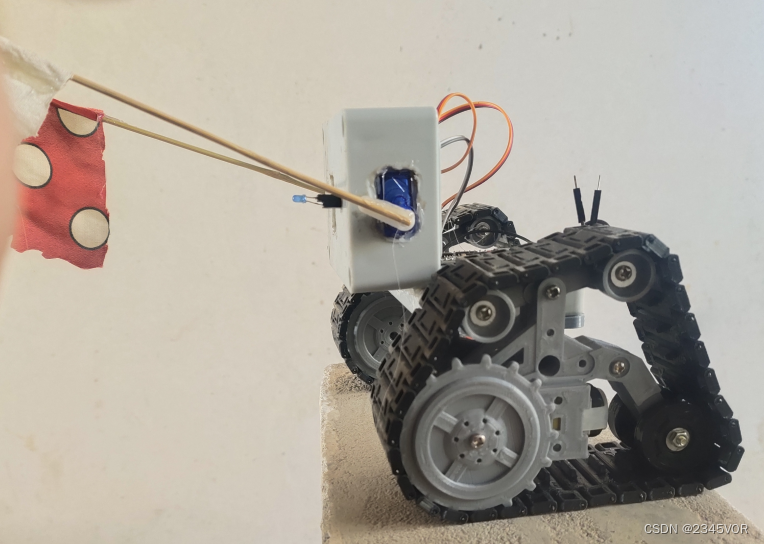
5.2.2 实物连接
- 发射机
- 接收机
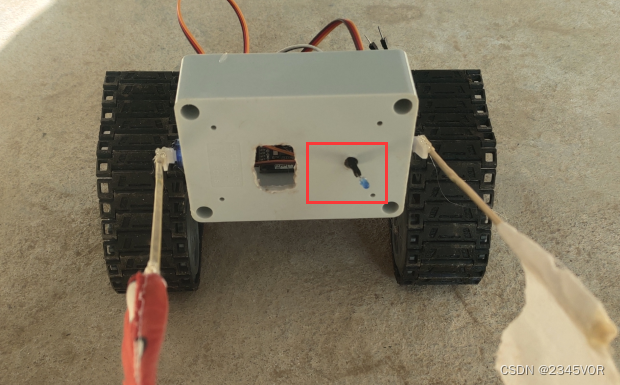
后视图
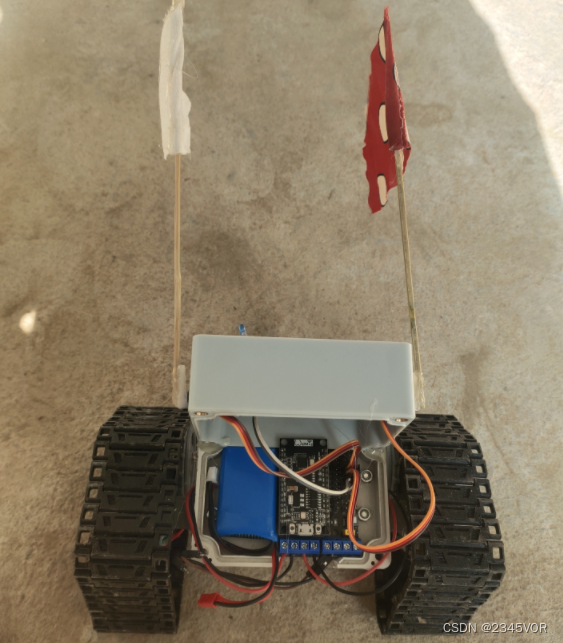
前视图
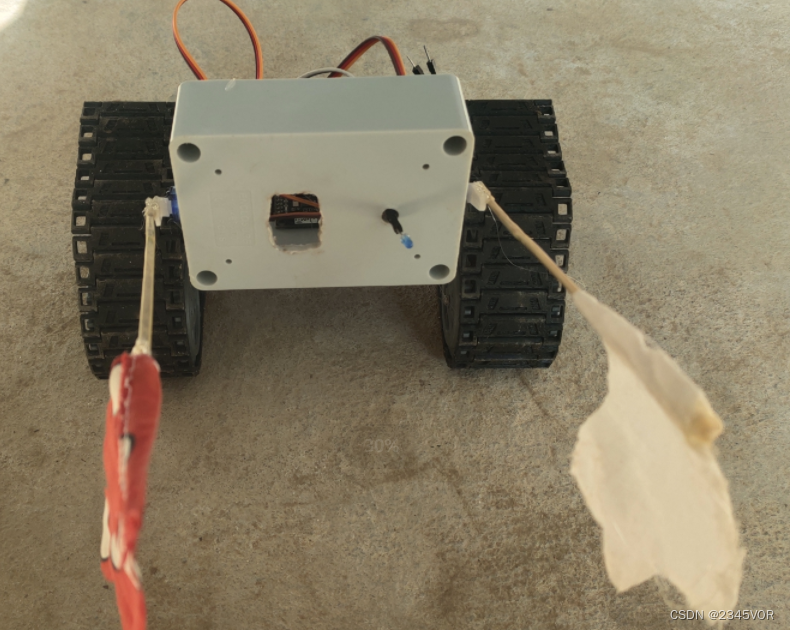
侧视图
5.3 软件设计
项目工程在gitcode托管,目前有两版,第一版可以简单测试串口,发行版可以正常控制

5.3.1 接收机
- max7800程序部分main.c,详细见工程
//字符数组定义
const char keywords[NUM_OUTPUTS][10] = { "UP", "DOWN", "LEFT", "RIGHT", "STOP", "GO",
"YES", "NO", "ON", "OFF", "ONE", "TWO",
"THREE", "FOUR", "FIVE", "SIX", "SEVEN", "EIGHT",
"NINE", "ZERO", "Unknown" };
const uint8_t TestTxData[BUFF1_SIZE]="CDGRSTUhaf234555555g5";
//置信度大于90采用串口2发送
/* output char*/
if(probability>90){
*firstName = TestTxData[out_class];
writemsg( firstName, 1);//发送串口2字符指令
printf("\n count : %d: %d: %s\n", count++,count%62,firstName);
/* */
}- esp8266T程序
// #include <WiFi.h>
#include <ESP8266WiFi.h>
#include <PubSubClient.h>
// #define joyX 34
// #define joyY 35
// int Ym, Fx, R, L;
// 设置wifi接入信息(遥控器要连接的wifi)
// const char* ssid = "J09 502";
// const char* password = "qwertyuiop111";
// const char* ssid = "vor";
// const char* password = "vor980501";
const char* ssid = "XY-031026";
const char* password = "12345678";
String topicString = "minivorCar214923790t7"; //输入自己的特定主题名,能保证别人不和你重复就行
const char* mqttServer = "test.ranye-iot.net";
// const char* mqttServer = "8.142.157.58";
// 如以上MQTT服务器无法正常连接,请前往以下页面寻找解决方案
// http://www.taichi-maker.com/public-mqtt-broker/
WiFiClient wifiClient;
PubSubClient mqttClient(wifiClient);
/**mixly**/
#include <SoftwareSerial.h>
#define timer1 300
volatile int item;
volatile byte item1;
volatile int item2;
volatile byte item3;
volatile int operators;
String strings;
int A[4]={400,1850,3400,4200},B[6]={600,1850,3700,4200,3400,4090},C[4]={90,120,180,200},D[4]={90,60,0,200},E[4]={0,1,5,10};
int action[2][5] = {
{ A[3], B[3], C[3], D[3], E[3] },
{ A[1], B[1], C[1], D[1], E[0]}
};
int mylist[15][5] = {
{ A[3], B[3], C[2], D[2], E[3] },//up
{ A[3], B[3], C[0], D[0], E[3] },//down
{ A[0], B[3], C[1], D[2], E[3] },//left
{ A[2], B[3], C[2], D[1], E[3] },//right
{ A[1], B[1], C[1], D[1], E[0] },//stop
{ A[3], B[2], C[3], D[3], E[1] },//go
{ A[3], B[1], C[3], D[3], E[3] },//yes
{ A[3], B[0], C[3], D[3], E[3] },//no
{ A[3], B[3], C[3], D[3], E[1] },//on
{ A[3], B[3], C[3], D[3], E[0] },//off
{ A[3], B[1], C[3], D[3], E[3] },//zero
{ A[3], B[4], C[3], D[3], E[3] },//1
{ A[3], B[2], C[3], D[3], E[3] },//2
{ A[3], B[5], C[3], D[3], E[3] },//3
{ A[3], B[3], C[3], D[3], E[3] }//unknow
};
SoftwareSerial mySerial(0, 5);
/******/
void setup() {
/**mixly**/
item = 0;
item1 = ' ';
item2 = 0;
item3 = ' ';
operators = 4;//stop
strings = "hello";
Serial.begin(115200);
mySerial.begin(115200);
pinMode(4, OUTPUT);
//v1: 串口读取
//v2: 串口周期性点灯
//v3: 添加语音串口通讯点灯
//v4: 添加二维数组语音控制
digitalWrite(4, LOW);
Serial.println(strings);
mySerial.println(strings);
/******/
// pinMode(joyX, INPUT);
// pinMode(joyY, INPUT);
WiFi.mode(WIFI_STA); //设置ESP8266工作模式为无线终端模式
connectWifi(); // 连接WiFi
mqttClient.setServer(mqttServer, 1883); // 设置MQTT服务器和端口号
connectMQTTServer(); // 连接MQTT服务器
}
int count = 0;
void loop() {
if (mqttClient.connected()) { // 如果开发板成功连接服务器
pubMQTTmsg();
//count = 0;
mqttClient.loop(); // 保持客户端心跳
} else { // 如果开发板未能成功连接服务器
connectMQTTServer(); // 则尝试连接服务器
}
delay(10);
}
void connectMQTTServer() {
// 根据ESP32的MAC地址生成客户端ID(避免与其它ESP32的客户端ID重名)
String clientId = "esp8266-" + WiFi.macAddress();
// 连接MQTT服务器
if (mqttClient.connect(clientId.c_str())) {
Serial.println("MQTT Server Connected.");
Serial.println("Server Address: ");
Serial.println(mqttServer);
Serial.println("ClientId:");
Serial.println(clientId);
} else {
Serial.print("MQTT Server Connect Failed. Client State:");
Serial.println(mqttClient.state());
delay(3000);
}
}
void pubMQTTmsg() {
static int value; // 客户端发布信息用数字
char publishTopic[topicString.length() + 1]; // 这么做是为确保不同用户进行MQTT信息发布时,ESP8266客户端名称各不相同,
strcpy(publishTopic, topicString.c_str());
// Ym = analogRead(joyY); //读取油门信息
// Fx = analogRead(joyX); //读取方向信息
// // 建立发布信息。信息内容以Hello World为起始,后面添加发布次数。
// String messageString = "A" + String(Ym) + "B" + String(Fx) + "C" + String(R) + "D" + String(L) + "E";
/**mixly**/
procedure2();
procedure();
procedure4(operators);
if (item > 234 && item < 239) {
// procedure3();
// delay(100);
item = (map(item - 235, 0, 3, 0, 255));
analogWrite(4, item);
}
if (item == 229) {
digitalWrite(4, LOW);
}
String messageString = strings;
/**mixly**/
char publishMsg[messageString.length() + 1];
strcpy(publishMsg, messageString.c_str());
// 实现ESP32向主题发布信息
if (mqttClient.publish(publishTopic, publishMsg)) {
//Serial.println("Publish Topic:");Serial.println(publishTopic);
//Serial.println("Publish message:");
Serial.println(publishMsg);
} else {
Serial.println("Message Publish Failed.");
}
delay(timer1);
}
void connectWifi() {
WiFi.begin(ssid, password);
//等待WiFi连接,成功连接后输出成功信息
while (WiFi.status() != WL_CONNECTED) {
delay(1000);
Serial.print(".");
}
Serial.println("");
Serial.println("WiFi Connected!");
Serial.println("");
}
void procedure() {
if (item3 != item1) {
Serial.print("item: ");
Serial.println(item);
Serial.print("item1: ");
Serial.println(item1);
item3 = item1;
}
}
void procedure2() {
if (Serial.available() > 0) {
item1 = Serial.read();
}
if (mySerial.available() > 0) {
item1 = mySerial.read();
item = String(item1).toInt();
operators = item - 225;
}
if (item == 0) {
item = item2;
}
item2 = item;
}
void procedure3() {
Serial.println("ok");
mySerial.println("ok");
}
void procedure4(int x) {
for (int i = 0; i <= 4; i = i + (1)) {
if (mylist[x][i] < action[0][i]) {
action[1][i] = mylist[x][i];
}
}
strings = String("A") + String(3700-action[1][0]) + String("B") + String(action[1][1]) + String("C") + String(action[1][2]) + String("D") + String(action[1][3]) + String("E") + String(action[1][4]) + String("F");
// strings0 = String("A") + String(A[1]) + String("B") + String(B[1]) + String("C") + String(C[1]) + String("D") + String(D[1]) + String("E") + String(E[0]) + String("F");
// Serial.print("massage: ");
// Serial.println(strings);
}
5.3.2 发射机
- esp8266R程序
#include <ESP8266WiFi.h>
#include <PubSubClient.h>
#include <Ticker.h>
#include <espnow.h>
#include <Servo.h> // 调用Servo库
Servo servo_R; // 定义Servo对象来控制
Servo servo_L; // 定义Servo对象来控制
Ticker ticker;
/*
Board pin | NodeMCU GPIO | Arduino IDE
A- 1 5 or D1
A+ 3 0 or D3
B- 2 4 or D2
B+ 4 2 or D4
*/
#define IN_1 D1
#define IN_2 D3
#define IN_3 D2
#define IN_4 D4
#define LED D7
// #define servopinr D5
// #define servopinl D6
//↑↑↑以上4个IO口可以输出PWM波,实现全比例控制速度
// 设置wifi接入信息(根据小车要连接的WiFi信息进行修改)
// const char* ssid = "J09 502";
// const char* password = "qwertyuiop111";
// const char* ssid = "vor";
// const char* password = "vor980501";
const char* ssid = "XY-031026";
const char* password = "12345678";
String topicString = "minivorCar214923790t7"; //与esp32代码中的该部分相同
int YmMedian = 1816; //油门中位值
int FxMedian = 1811; //方向中位值
const char* mqttServer = "test.ranye-iot.net";
// 如以上MQTT服务器无法正常连接,请前往以下页面寻找解决方案
// http://www.taichi-maker.com/public-mqtt-broker/
int Ym, Fx, LeCar;
WiFiClient wifiClient;
PubSubClient mqttClient(wifiClient);
void setup() {
pinMode(IN_1, OUTPUT);
pinMode(IN_2, OUTPUT);
pinMode(IN_3, OUTPUT);
pinMode(IN_4, OUTPUT);
pinMode(LED, OUTPUT);
// pinMode(servopinr, OUTPUT); //设定舵机接口为输出接口
// pinMode(servopinl, OUTPUT); //设定舵机接口为输出接口
while (esp_now_init() != 0) {
Serial.println("Error initializing ESP-NOW");
}
servo_R.attach(D5,500,2500); // 控制线连接数字D5
servo_L.attach(D6,500,2500); // 控制线连接数字D6
goStop();
Serial.begin(115200); // 启动串口通讯(波特率为9600,波特率可以理解为串口传输数据的速度)
WiFi.mode(WIFI_STA); //设置ESP8266工作模式为无线终端模式(8266像手机一样连接到wifi的模式)
connectWifi(); // 连接WiFi
mqttClient.setServer(mqttServer, 1883); // 设置MQTT服务器和端口号
mqttClient.setCallback(receiveCallback); // 设置MQTT订阅回调函数
connectMQTTserver(); // 连接MQTT服务器
ticker.attach(0.3, touch);
}
void loop() {
if (mqttClient.connected()) { // 如果开发板成功连接服务器
mqttClient.loop(); // 处理信息以及心跳
} else { // 如果开发板未能成功连接服务器
goStop();
connectMQTTserver(); // 则尝试连接服务器
}
}
// 连接MQTT服务器并订阅信息
void connectMQTTserver() {
// 根据ESP8266的MAC地址生成客户端ID(避免与其它ESP8266的客户端ID重名)
String clientId = "esp8266-" + WiFi.macAddress();
// 连接MQTT服务器
if (mqttClient.connect(clientId.c_str())) {
Serial.println("MQTT Server Connected.");
Serial.println("Server Address:");
Serial.println(mqttServer);
Serial.println("ClientId: ");
Serial.println(clientId);
subscribeTopic(); // 订阅指定主题
} else {
Serial.print("MQTT Server Connect Failed. Client State:");
Serial.println(mqttClient.state());
delay(5000);
}
}
// 收到信息后的回调函数
// char Ym0[5], Fx0[5]; //储存接受到的油门和方向数据
// int Alocation, Blocation, Clocation, Ym1, Fx1;
char Ym0[5], Fx0[5], R0[5], L0[5], M0[5]; //储存接受到的油门和方向数据
int Alocation, Blocation, Clocation, Dlocation, Elocation, Flocation, Ym1=1850, Fx1=1850, R1=90, L1=90, M1=0; //定义解析标记位
// 收到信息后的回调函数
//A1827B1835C180D180E0F
void receiveCallback(char* topic, byte* payload, unsigned int length) {
if ((char)payload[0] == 'A') //检测esp8266是否联网
{
LeCar = 1;
} else {
LeCar = 0;
}
int j = 0, k = 0, l = 0, n = 0, o = 0;
for (int i = 1; i < 6; i++) {
if ((char)payload[i] != 'B') {
Ym0[j] = (char)payload[i];
j += 1;
} else {
Blocation = i;
break;
}
}
for (int i = Blocation + 1; i < 11; i++) {
if ((char)payload[i] != 'C') {
Fx0[k] = (char)payload[i];
k += 1;
} else {
Clocation = i;
break;
}
}
for (int i = Clocation + 1; i < 15; i++) {
if ((char)payload[i] != 'D') {
R0[l] = (char)payload[i];
l += 1;
} else {
Dlocation = i;
break;
}
}
for (int i = Dlocation + 1; i < 19; i++) {
if ((char)payload[i] != 'E') {
L0[n] = (char)payload[i];
n += 1;
} else {
Elocation = i;
break;
}
}
for (int i = Elocation + 1; i < length; i++) {
if ((char)payload[i] != 'E') {
M0[o] = (char)payload[i];
o += 1;
} else {
Flocation = i;
break;
}
}
// Ym1 = String(Ym0).toInt();
// Fx1 = String(Fx0).toInt();
Fx1 = String(Ym0).toInt();
Ym1 = String(Fx0).toInt();
R1 = String(R0).toInt();
L1 = String(L0).toInt();
M1 = String(M0).toInt();
//Ym1 = map(Ym1,YmMedian+50, 4095, 0, 255);
// Serial.print("Ym=");
// Serial.print(Ym1);
// Serial.print(",FX=");
// Serial.println(Fx0);
for (int i = 0; i < 5; i++) {
Ym0[i] = '\0';
Fx0[i] = '\0';
R0[i] = '\0';
L0[i] = '\0';
M0[i] = '\0';
}
}
// 订阅指定主题
void subscribeTopic() {
char subTopic[topicString.length() + 1];
strcpy(subTopic, topicString.c_str());
if (mqttClient.subscribe(subTopic)) {
Serial.println("Subscrib Topic:");
Serial.println(subTopic);
} else {
Serial.print("Subscribe Fail...");
}
}
void connectWifi() {
WiFi.begin(ssid, password);
//等待WiFi连接,成功连接后输出成功信息
while (WiFi.status() != WL_CONNECTED) {
delay(1000);
Serial.print(".");
}
Serial.println("");
Serial.println("WiFi Connected!");
Serial.println("");
}
int Speedy1, Speedy2, Speedx1, Speedx2, direction;
void touch() {
// Serial.print(Ym1);
// Serial.print(",");
// int a=YmMedian+50;
// Serial.println(a);
if (Ym1 > YmMedian + 50) {
Ym = map(Ym1, YmMedian + 50, 4095, 0, 255);
Speedy1 = Ym;
direction = 0;
// Serial.print("Speedy1:");
// Serial.println(Speedy1);
Speedy2 = 0;
} else if (Ym1 < YmMedian - 50) {
Ym = 255 - map(Ym1, 0, YmMedian - 50, 0, 255);
Speedy1 = 0;
direction = 1;
Speedy2 = Ym;
// Serial.print("Speedy2:");
// Serial.println(Speedy2);
} else if (Fx1 > FxMedian + 50) {
Fx = map(Fx1, FxMedian + 50, 4095, 0, 255);
Speedx1 = Fx;
// Serial.print("Speedx1:");
// Serial.println(Speedx1);
Speedx2 = 0;
} else if (Fx1 < FxMedian - 50) {
Fx = 255 - map(Fx1, 0, FxMedian - 50, 0, 255);
Speedx1 = 0;
Speedx2 = Fx;
// Serial.print("Speedx2:");
// Serial.println(Speedx2);
} else if (YmMedian - 50 < Ym1 < YmMedian + 50 && FxMedian - 50 < Fx1 < FxMedian + 50) {
Speedy1 = 0;
Speedy2 = 0;
Speedx1 = 0;
Speedx2 = 0;
Ym = 0;
Fx = 0;
}
if (LeCar == 1)
GoCar();
else
goStop();
}
void GoCar() {
analogWrite(IN_1, Speedy1 + Speedx1 + Speedy2);
digitalWrite(IN_2, direction);
analogWrite(IN_3, Speedy1 + Speedx2 + Speedy2);
digitalWrite(IN_4, direction);
Serial.println("IN_1: " + String(Speedy1 + Speedx1 + Speedy2) + "IN_3: " + String(Speedy1 + Speedx2 + Speedy2));
Serial.println("A" + String(Ym1) + "B" + String(Fx1) + "C" + String(R1) + "D" + String(L1) + "E"+ String(M1) + "F");
servo_R.write(R1); // 舵机角度写入
servo_L.write(L1); // 舵机角度写入
digitalWrite(LED,M1);
}
void goStop() {
digitalWrite(IN_1, LOW);
digitalWrite(IN_2, LOW);
digitalWrite(IN_3, LOW);
digitalWrite(IN_4, LOW);
digitalWrite(LED, LOW);
servo_R.write(90); // 舵机角度写入
servo_L.write(90); // 舵机角度写入
// delay(100);
}
6. 实验效果
首先是搭建接收机和发射机硬件结构,然后下载程序,检查设备接线,测试15组关键字功能
max7800串口打印效果
21:05:31.663 -> ***** Init *****
21:05:31.664 -> pChunkBuff: 128
21:05:31.665 -> pPreambleCircBuffer: 3840
21:05:31.668 -> pAI85Buffer: 16384
21:05:31.737 -> Error opening SD card: FR_NOT_READY
21:05:31.741 -> *** !!!SD ERROR (mounting) !!! ***
21:05:31.744 ->
21:05:31.744 -> *** I2S & Mic Init ***
21:05:33.741 ->
21:05:33.741 -> *** READY ***
21:05:42.895 -> 136448 Word starts from index: 132480, avg:499 > 350
21:05:43.371 -> 144000: Word ends, Appends 4992 zeros
21:05:43.375 -> 144000: Starts CNN: 1
21:05:43.376 ->
21:05:43.378 -> 144000: Completes CNN: 1
21:05:43.381 -> CNN Time: 1843 us
21:05:43.382 -> Min: -128, Max: 127
21:05:43.384 -> -----------------------------------------
21:05:43.388 -> Detected word: ON (96.5%)
21:05:43.391 -> count : 0: 1: a
21:05:43.392 ->
21:05:43.392 -> -----------------------------------------
21:05:43.454 -> Error opening SD card: FR_NOT_READY
21:05:43.455 -> *** !!!SD ERROR!!! ***
21:05:43.457 ->
21:05:43.457 ->
21:05:43.457 -> *** READY ***
21:05:47.081 -> 201984 Word starts from index: 198016, avg:407 > 350
21:05:47.502 -> 208640: Word ends, Appends 5888 zeros
21:05:47.507 -> 208640: Starts CNN: 2
21:05:47.511 -> 208640: Completes CNN: 2
21:05:47.513 -> CNN Time: 1843 us
21:05:47.518 -> Min: -115, Max: 110
21:05:47.518 -> -----------------------------------------
21:05:47.520 -> Detected word: OFF (100.0%)
21:05:47.523 -> count : 1: 2: f
21:05:47.524 ->
21:05:47.524 -> -----------------------------------------
21:05:47.583 -> Error opening SD card: FR_NOT_READY
21:05:47.586 -> *** !!!SD ERROR!!! ***
21:05:47.588 ->
21:05:47.589 ->
21:05:47.589 -> *** READY *** 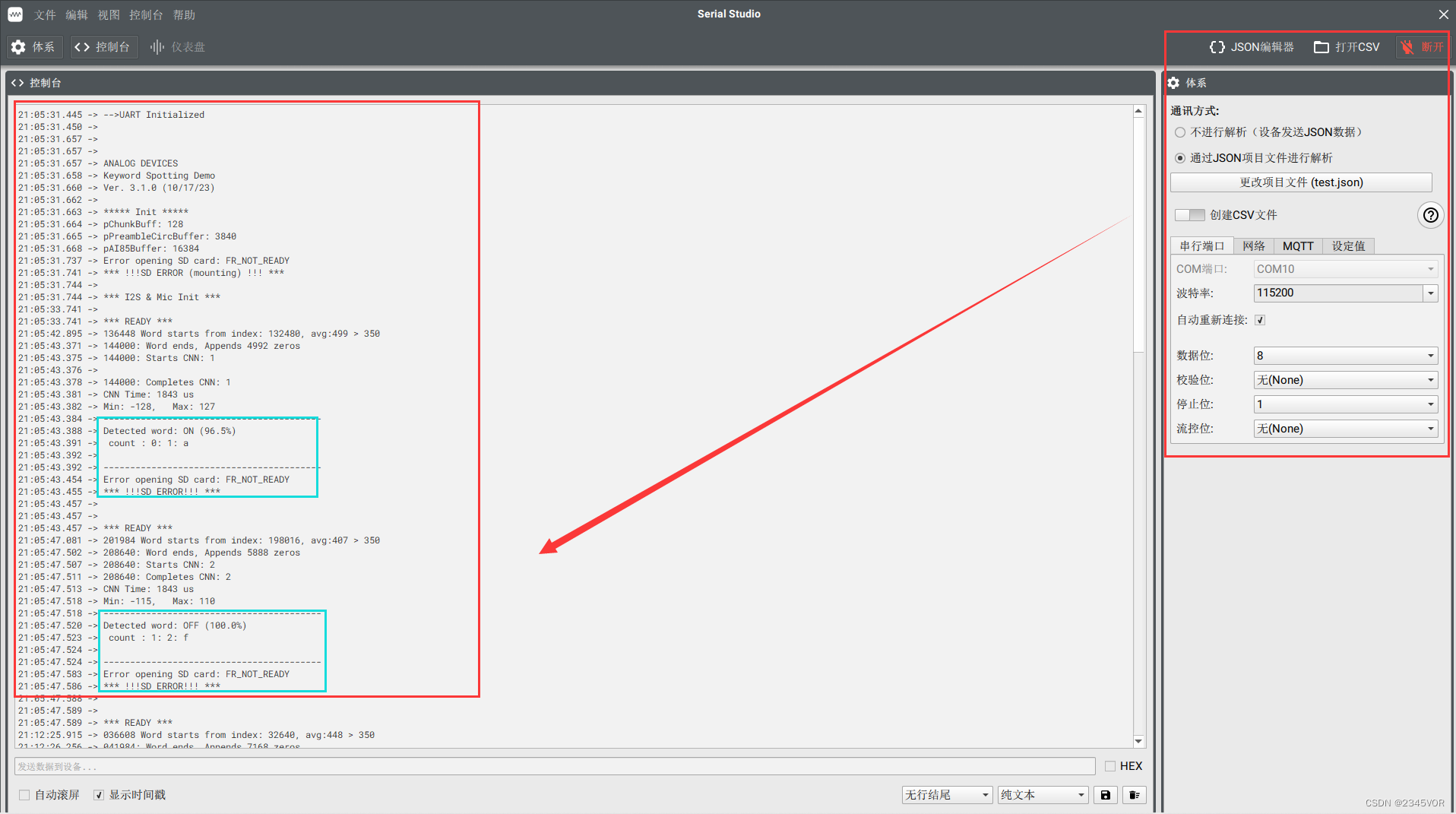
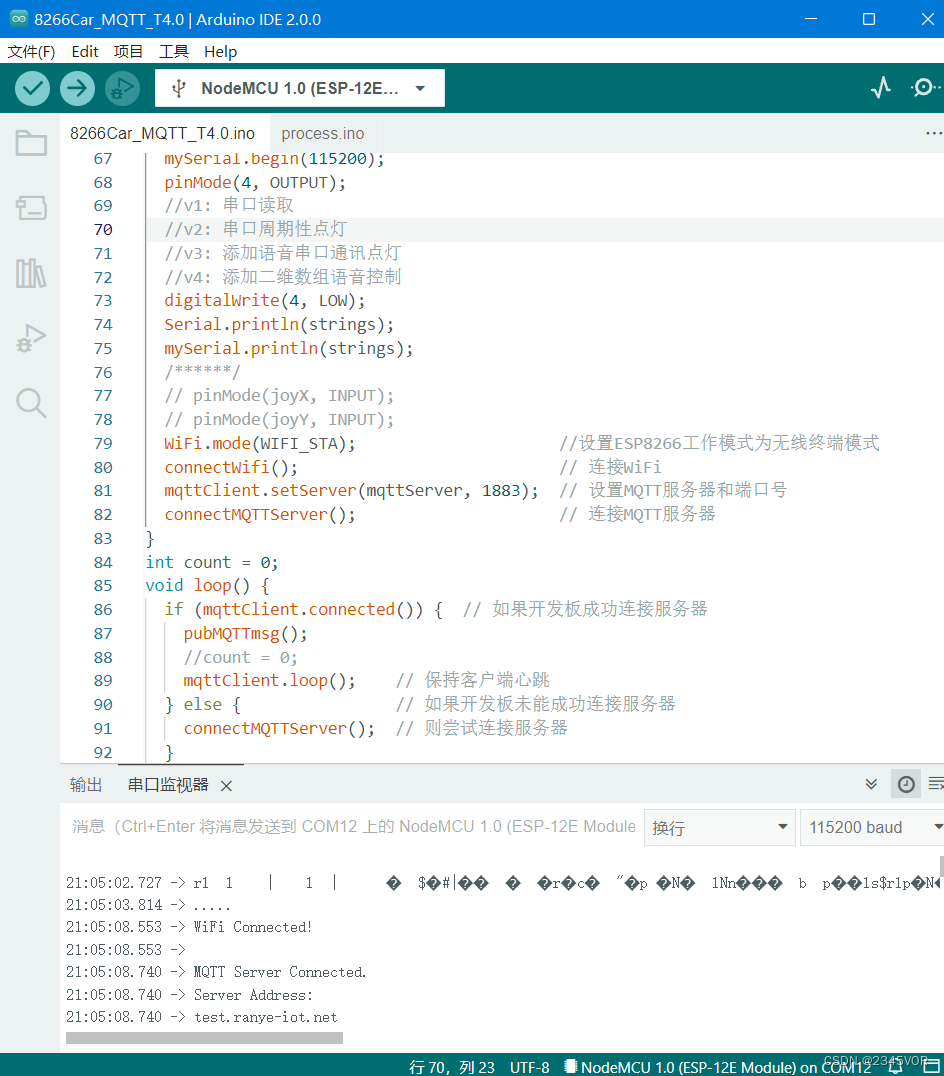
esp8266T串口打印效果
21:05:02.727 -> rll��|�l�|�$�#|����r�c�"�p�N�lNn���bp��ls$rlp�N��$��#n�|���b��nn�$��l �Nn�{lor���o{r� p�o�r������bN��o�c��no��d �Nn�lor���Nrl`r��or$`����l$`��N�dhello
21:05:03.814 -> .....
21:05:08.553 -> WiFi Connected!
21:05:08.553 ->
21:05:08.740 -> MQTT Server Connected.
21:05:08.740 -> Server Address:
21:05:08.740 -> test.ranye-iot.net
21:05:08.740 -> ClientId:
21:05:08.740 -> esp8266-C8:2B:96:08:73:AD
21:05:08.740 -> A1850B1850C120D60E0F
21:05:09.051 -> A1850B1850C120D60E0F
21:05:09.361 -> A1850B1850C120D60E0F
esp8266R串口打印效果
21:09:05.523 -> sdlܟ<�l�<�l�c|����r�#�c��gn�dog���c8��lrd;lx�o��d��#g�|�Ǐ#��ng�$��l �'o�dgs���ors�`p�'�s�ܜ���co�<�c��'o��d`�'o�dgs���or$`r��gsl`�����d`��g�d........
21:09:14.394 -> WiFi Connected!
21:09:14.394 ->
21:09:14.797 -> MQTT Server Connected.
21:09:14.797 -> Server Address:
21:09:14.797 -> test.ranye-iot.net
21:09:14.797 -> ClientId:
21:09:14.797 -> esp8266-48:55:19:16:40:C1
21:09:14.797 -> Subscrib Topic:
21:09:14.797 -> minivorCar214923790t7
21:09:18.079 -> IN_1: 0IN_3: 0
21:09:18.079 -> A1850B1850C120D60E0F
21:09:18.388 -> IN_1: 0IN_3: 0
演示视频:基于MAX7800羽毛板语音控制ESP8266小车_哔哩哔哩_bilibili


7. 总结
- 这是我第二次参加嵌入式相关的网上比赛活动,第一次是RT-Thread的【基于RT-Thread+RA6M4的智能鱼缸系统设计之鱼我所欲也】活动,作品是022年暑假做的获得第六名,还是比较 开心!
- 我相信我的付出,期待这一次的成绩!
虽然这次比赛初期我没有进行kws20 demo的训练试验,但是勇敢的我说是站在巨人的肩膀上,有点小遗憾我的时间和电脑都比较拉胯,下次争取做一些训练,跑一跑模型!我们每天都一点点结合联动丰富生活,从而实现对外部世界进行充分的感知,尽最大努力认识这个有机与无机的环境,科学地合理地进行创作和发挥效益,然后为人类社会发展贡献一点微薄之力。
再次非常感谢大赛支持和胡同学,乔大哥等等
参考文献
智能推荐
SAS函数——字符函数-程序员宅基地
文章浏览阅读1w次,点赞5次,收藏58次。一、计算变量的长度基本格式:length(变量):对缺失值返回1。 lengthn(变量):对缺失值返回0。注意:长度不包括尾部空。 数值型长度默认为12。data iden; input iden $; length_1=length(iden); length_2=lengthn(iden);cards;abcdabcd123abcd_123.;proc print;run;二、提取变量中的字符指定一个变量,对该变量从起始位置.
华大MCU_HC32F460串口TX发送使用DMA传输遇到的坑_hc32l136 串口dma-程序员宅基地
文章浏览阅读3.2k次,点赞4次,收藏25次。DAM初始化结构体DMA: 1 次请求传输 1 个数据块,支持连锁传输功能,可实现 1 次请求传输多个数据块。数据块最小为 1 个数据,最多可以是 1024 个数据,每个数据的宽度可配置为 8bit,16bit 或 32bit。/* DMA 初始化结构体: */ typedef struct stc_dma_config { uint16_t u16BlockSize; ///< 设置数据块的大小, 0~1023 (0表_hc32l136 串口dma
怎样换通达信服务器文件夹,通达信的指标模版保存在那个文件夹,如何迁移-程序员宅基地
文章浏览阅读2.5k次。通达信的指标模版保存在那个文件夹,如何迁移在T0002文件夹里,PriCS.DAT是软件自带指标,PriGS.DAT是你的自定义指标。自选股票T0002\blocknew\ZXG.blk自编公式T0002\PriGS.DAT自编模板T0002\PriPack.DAT系统设置(常用指标)T0002\user.配置设置通达信\T0002\blocknew中ZXG.blk这个文件就是自选股文件,可以通过...
Intelli IDEA java调用DLL库_idea打开dll文件-程序员宅基地
文章浏览阅读6.8k次,点赞2次,收藏11次。Intelli IDEA创建java工程加载dll库_idea打开dll文件
时间序列预测基础教程系列(13)_归一化和标准化的区别与方法(Python)_对daily-minimum-temperatures中的数据进行处理-程序员宅基地
文章浏览阅读1.3w次,点赞10次,收藏51次。导读:数据的预处理方法有两种,分别是归一化和标准化什么时候用归一化?什么时候用标准化? (1)如果对输出结果范围有要求,用归一化。 (2)如果数据较为稳定,不存在极端的最大最小值,用归一化。 (3)如果数据存在异常值和较多噪音,用标准化,可以间接通过中心化避免异常值和极端值的影响。正文:完成本教程后,您将了解:使用标准化的数据规范化和期望的局限性。 需要什么参数以..._对daily-minimum-temperatures中的数据进行处理
Scala日期操作、获取当前时间、获取前一天时间、获取两日期时间差、获取两日期间所有日期_scala获取dt.format前一天-程序员宅基地
文章浏览阅读7.2k次,点赞4次,收藏12次。获取当前时间var dateFormat: SimpleDateFormat = new SimpleDateFormat("yyyy-MM-dd")var cal: Calendar = Calendar.getInstance()val nowday = dateFormat.format(cal.getTime())println(nowday)获取前1天日期val date = "2020-09-13"val myformat = new SimpleDateFormat("_scala获取dt.format前一天
随便推点
使用np.savetxt写入不覆盖原有内容,连续写入,循环写入_np.save函数会覆盖之前的吗-程序员宅基地
文章浏览阅读1.1w次,点赞11次,收藏28次。import numpy as npwith open('eye.txt','ab') as f: newresult1 = np.random.rand(2, 3) newresult2 = np.random.rand(2, 3) np.savetxt(f, newresult1, delimiter=" ") np.savetxt(f, newresult2, delimiter=" ") with open('eye.txt','ab') as f: ._np.save函数会覆盖之前的吗
HZAU 异或问题_异或问题博客-程序员宅基地
文章浏览阅读276次。1104: Sum and XORTime Limit: 5 Sec Memory Limit: 128 MBSubmit: 994 Solved: 56[Submit][Status][Web Board]Description Dr. Zeng is good at calculating sum of some numbers . Today , _异或问题博客
C++ vector中resize与reserve的比较_c++ 中的vector resize reserve 的区别-程序员宅基地
文章浏览阅读1.4w次,点赞3次,收藏5次。在介绍resize()与reserve()函数之前,可以先简单了解一下vector1、resize()既修改capacity大小,也修改size大小2、reserve()只修改capacity大小,不修改size大小_c++ 中的vector resize reserve 的区别
损失函数SSIM (structural similarity index) 的PyTorch实现_pytorch ssim-程序员宅基地
文章浏览阅读4w次,点赞33次,收藏182次。SSIM介绍结构相似性指数(structural similarity index,SSIM), 出自参考文献[1],用于度量两幅图像间的结构相似性。和被广泛采用的L2 loss不同,SSIM和人类的视觉系统(HVS)类似,对局部结构变化的感知敏感。SSIM分为三个部分:照明度、对比度、结构,分别如下公式所示:将上面三个式子汇总到一起就是SSIM:其中,上式各符号分..._pytorch ssim
小白学习HigherHRNet代码_higherhrnet代码分析-程序员宅基地
文章浏览阅读135次。每个节点都可以执行一部分训练工作,例如处理一部分的训练数据和更新模型的权重。这个函数的目标是将分布式训练的各个环节组织起来,从模型构建、数据加载、训练循环、学习率调整到模型保存,确保训练过程顺利进行。通道数是用来表示模型中不同层次的特征图(feature maps)的维度,它影响着模型的参数量、计算复杂度以及模型的性能。初始化分布式训练环境,包括分布式训练节点数量、分布式训练的进程与 GPU 分配等。根据训练效果,保存模型的检查点,包括当前状态和最好的状态。根据配置中的模型名称,调用相应的函数构建模型。_higherhrnet代码分析
实习日志(2)-程序员宅基地
文章浏览阅读675次,点赞2次,收藏3次。2021.07.12 星期一 新的星期开始,休息过两天之后,斗志满满。 今天先接触了递归,但由于之前学过,所以就一带而过了,在有些计算的时候需要考虑最优良的算法,这会使计算速度大大提升。接着又学习了词法环境,变量就是特殊内部对象的属性,与当前正在执行的代码块有关,操作变量实际上是操作该对象的属性。闭包就是指内部函数都可以访问其所在外部函数中被声明的变量和参数。这个应该是要记住,以后面试可能会被问到。还有函数自定义...