CodeForces 1045G AI robots(CDQ分治 + 树状数组 + 单调队列)_codeforces cdq-程序员宅基地
技术标签: 树状数组 CodeForces ------------数据结构----------- 单调队列 ---------Online Judge-------- --------------分治-------------- CDQ分治
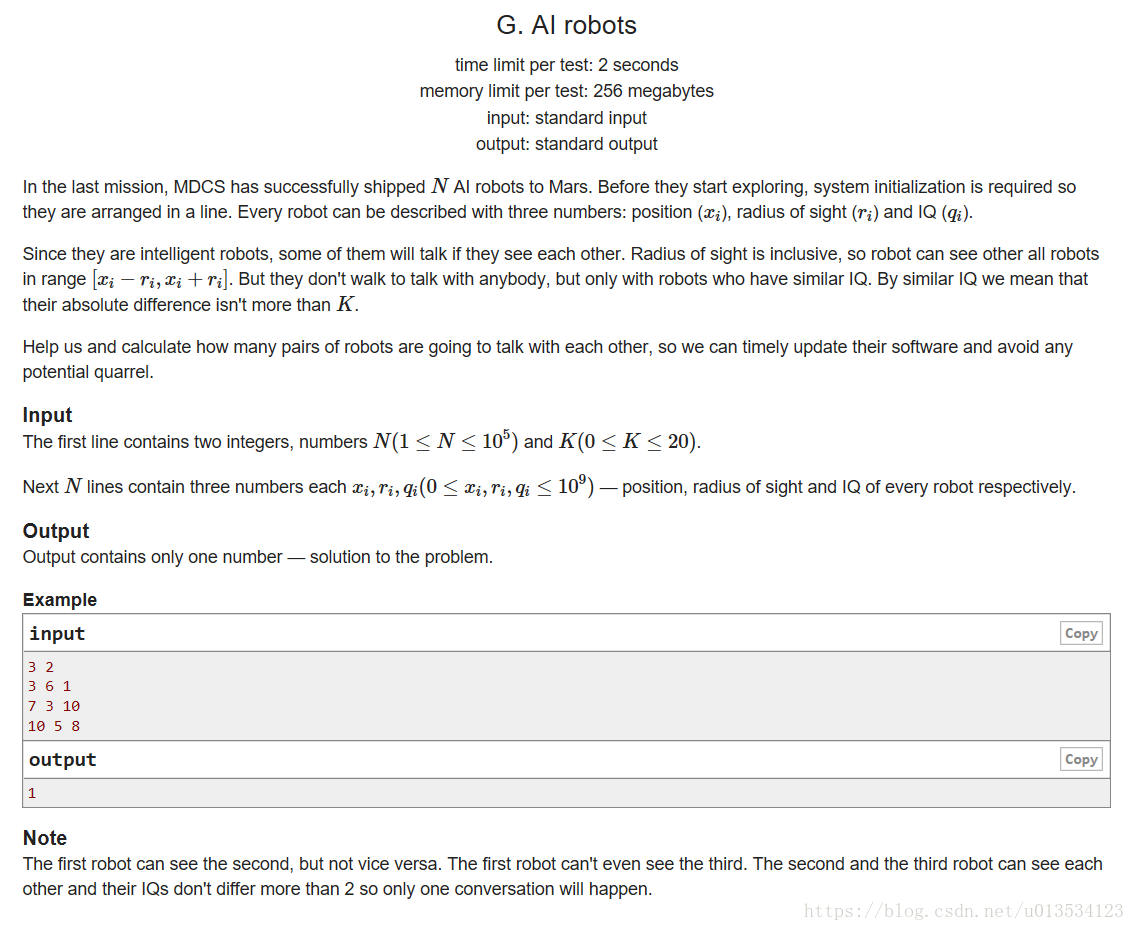
大致题意:有很多个机器人,他们要相互交流有一些限制条件。首先是,两个人要相互能够能够看到;其次,两个人的智商的差不超过K。现在给出每个机器人的视力范围和他们的智商,现在问你总共有多少对机器人能够相互交流。
首先来看下总共有多少个限制条件。由于是要求双方都能够看到,所以显然是要按照视野半径去排序的。然后要求两个人的智商差要在一定的范围内的,所以也要按照智商去排序。另外还要跟自己的位置有关。根据这个,我们可以构造出分治的大致方法:首先按照半径去排序,半径大的在前面,因为这样如果后面的东西能够看到前面,那么前面的东西一定能看到后面,符合cdq分治前面更新后面的要求;然后分治的过程中归并排序按照智商的大小去排序,因为这样可以利用一些单调性,同时好确定智商差;最后就是用一个离散化的树状数组去维护每个位置的机器人数量。
前面和最后的都好说,关键是如何利用智商差去求能够相互看到的机器人的对数。这里我们用到了单调队列。由于是按照智商的大小来进行分治的。所以前一半和后一半已经是按照智商的大小排好序了的,所以说我们可以利用单调性。根据cdq分治的原则,前面一半去更新后面一半,所以我们考虑对于后一半的每个机器人,单独计算贡献。对于后一半的第i个机器人,我可以在前一半确定一个区间[j,k],在这个区间内的所有机器人与机器人i的智商差不超过K。把这个区间内的所有机器人添加到树状数组中,然后贡献就是机器人i视野范围内的机器人数目。然后再往后考虑后一半的其他机器人。由于前一半和后一半的智商是递减的,所以从i移动到i+1区间的移动只会单调往后移动,符合单调队列性质。这样前一半的每一个机器人只会进出队列各一次,对应加入和移出树状数组各一次。所以这个部分均摊的时间复杂度是O(NlogN)的,这个log来自树状数组。
如此我们就求出了合并的时候前面对后面产生的贡献。总的时间复杂度就是O(NlogNlogN)。具体见代码:
#include<bits/stdc++.h>
#define LL long long
#define N 100010
using namespace std;
struct node{int x,r,iq,L,R;} p[N],tmp[N];
int n,tot,K,x[N<<2],q[N]; LL ans=0;
struct BinaryIndexedTree
{
int c[N<<2];
inline void update(int x,int k)
{
x=min(x,tot);
for(;x<=tot;x+=x&-x) c[x]+=k;
}
inline int getsum(int x)
{
int ans=0;
for(;x>0;x-=x&-x) ans+=c[x];
return ans;
}
} BIT;
bool cmp1(node a,node b)
{
return a.r>b.r;
}
bool cmp2(node a,node b)
{
return a.iq>b.iq;
}
void cdq(int l,int r)
{
if (l==r) return;
int mid=(l+r)>>1;
cdq(l,mid);
cdq(mid+1,r);
int h=0,t=0;
for(int i=mid+1,j=l;i<=r;i++)
{
while(j<=mid&&p[j].iq-p[i].iq>K) j++;
while(j<=mid&&abs(p[j].iq-p[i].iq)<=K)
{
BIT.update(p[j].x,1);
q[t++]=j++;
}
while(h<t&&abs(p[q[h]].iq-p[i].iq)>K)
{
BIT.update(p[q[h]].x,-1);
h++;
}
ans+=BIT.getsum(p[i].R)-BIT.getsum(p[i].L-1);
}
for(;h<t;h++) BIT.update(p[q[h]].x,-1);
inplace_merge(p+l,p+mid+1,p+r+1,cmp2);
}
int main()
{
scanf("%d%d",&n,&K);
for(int i=1;i<=n;i++)
{
int X,Y,Z;
scanf("%d%d%d",&X,&Y,&Z);
p[i]=node{X,Y,Z,0,0};
x[++tot]=X; x[++tot]=X-Y; x[++tot]=X+Y;
}
sort(x+1,x+tot+1);
tot=unique(x+1,x+tot+1)-x-1;
for(int i=1;i<=n;i++)
{
p[i].L=lower_bound(x+1,x+tot+1,p[i].x-p[i].r)-x;
p[i].R=lower_bound(x+1,x+tot+1,p[i].x+p[i].r)-x;
p[i].x=lower_bound(x+1,x+tot+1,p[i].x)-x;
}
sort(p+1,p+n+1,cmp1);
cdq(1,n);
printf("%lld\n",ans);
return 0;
}
智能推荐
NFC技术演进_nfc的演进-程序员宅基地
文章浏览阅读289次。RF演进protocol 演进_nfc的演进
1.3 wait 和notify 原理_wait 和 notify原理-程序员宅基地
文章浏览阅读384次。wait 和notify 是实现线程之间的协同工作,必须结合synchronized使用,wait 释放锁,notify 不释放锁(但是此时会通知在等待的wait,该notify完全执行完毕,才真正释放锁)public class DemoThread18{ //原子类 private volatile List<String> list = new ArrayList..._wait 和 notify原理
谷歌又出浏览器了Google Chrome_谷歌浏览器 我是人类-程序员宅基地
文章浏览阅读601次。相信大部分 做ui的朋友 都非常痛恨一件事情 就是程序以及css和不同浏览器的兼容问题,我就奇怪了google你不好好的做你的搜索引擎,弄什么浏览器呀,本让现在 作东西考虑各个浏览器兼容 已经够累的,你还真会添乱。本来做你就做也无所谓,还花那么大力气推广,要不说你有钱,有了用户群,写东西就不得不考虑你了,大哥我们这些 闷头写程序的不容易,我们还要养家户口呢,你就别添乱了行不行。 _谷歌浏览器 我是人类
微信公众号在线选房电子选车位房地产云开盘线上大屏幕抢房系统-程序员宅基地
文章浏览阅读551次,点赞18次,收藏9次。前端演示咨询客服:
MAKO Vimba2.0安装教程和qt中调用Vimba相机_vimba viewer-程序员宅基地
文章浏览阅读6.4k次,点赞7次,收藏29次。一、MAKO Vimba2.0安装教程1. 打开Vimba2.0安装软件,用户可到大恒官网下载最新驱动。2.选择选项Application Development和安装路径,注意:安装路径中不要存在空格。然后,点击Star,开始安装。 3.勾选Install Vimba Drivers,然后,点击Exit退出。4.接下来继续安装,勾选-选择“安装”,重复操作..._vimba viewer
【Linux4.1.12源码分析】协议栈报文接收之传输层处理分析(UDP)___udp4_lib_rcv-程序员宅基地
文章浏览阅读3k次。UDP报文的处理入口是udp_rcv函数,该函数是在ip_local_deliver_finish函数中被调用的。1、udp_rcv函数int udp_rcv(struct sk_buff *skb){ return __udp4_lib_rcv(skb, &udp_table, IPPROTO_UDP);}2、__udp4_lib_rcv函数int __udp4_lib_rcv___udp4_lib_rcv
随便推点
HOG特征——行人识别_hog特征识别行人 peopledetector=vision.peopledetector; i=-程序员宅基地
文章浏览阅读1.8k次,点赞4次,收藏24次。HOG特征简介HOG 全称为 Histogram of Oriented Gradients ,即方向梯度的直方图。HOG 是由 Navneet Dalal & Bill Triggs 在 CVPR 2005发表的论文中提出来的,目的是为了更好的解决行人检测的问题。先来把这几个字拆开介绍,首先,梯度的概念和计算梯度的方法已经在前一篇文章中介绍了,方向梯度就是说梯度的方向我们也要利用上,..._hog特征识别行人 peopledetector=vision.peopledetector; i=imread(
Spring Cloud 微服务的安全保护_springboot微服务安全-程序员宅基地
文章浏览阅读2.8k次,点赞2次,收藏9次。上一篇文章中介绍了如何使用Spring Cloud搭建微服务,在本文中讲讲如何对微服务进行安全保护。在Spring Cloud中对应用进行安全保护通常使用Spring Security,这种方式集成起来非常简单而且很容易扩展现有的应用场景。在分布式环境中Spring Security使用Spring Session和Redis来共享会话。共享会话可以将在微服务网关中登录的用户验证信息传递到系统..._springboot微服务安全
生物信息学中两种常用的文本文件_.fa.gz-程序员宅基地
文章浏览阅读961次。通过自学《碱基矿工》[http://mp.weixin.qq.com/mp/homepage?__biz=MzAxOTUxOTM0Nw==&hid=1&sn=d945cf61bd86e85724e146df42af5bcc&scene=18#wechat_redirect]下面分别介绍这两种格式FASTAFASTA常作为存储有顺序的序列数据的文件后缀,包括我们常用的..._.fa.gz
【centos安装mysql服务器并开启远程访问】_centos 查看 mysql 远程连接-程序员宅基地
文章浏览阅读1k次。centos安装mysql如果设置的密码太简单了会报错( ERROR 1819 (HY000): Your password does not satisfy the current policy requirements)解决方案如下:登录mysql执行:第一个密码强度等级,第二个是密码长度设置为6位(如果你设置的是8位就不做修改)另外可以通过语句查看密码设置规则2 赋权所有远程ip都可以进行登录(如果未开放端口得需要去腾讯云或者阿里云官网实例防火墙与策略开启端口,mysql默认的_centos 查看 mysql 远程连接
Linux(centos)下Nginx+Keepalived集群环境搭建_linux搭建nginx+keepalived-程序员宅基地
文章浏览阅读299次。本人使用的环境是CentOS-6.4-x86_64-bin-DVD1.rar,nginx-1.6.2.tar.gz,keepalived-1.2.18.tar.gz。三台机器ip:192.168.1.123,192.168.1.124。同时关闭两台虚拟机的防火墙:chkconfig iptables off(永久关闭防火墙)..._linux搭建nginx+keepalived
WebMagic Java 爬虫的简单应用_webmagic没反应-程序员宅基地
文章浏览阅读2k次。前段时间做旅游本体的知识库,我和老师反应说景点之间关系太少了,导致整个图很稀疏。。“你去wiki上抓一批数据吧”,就这样被自己坑了。由于一直在用java做项目,ZWQ师兄推荐的是selenium,这个我想说真的很强大,还支持JS渲染,不过当我看到这篇的时候,我决定学一下WebMagic。项目中文文档地址:http://webmagic.io/docs/zh/这个项目很容易上手,只要_webmagic没反应