【ART-Pi与RT-Thread入门】⑤ART-Pi配置PWM设备(避坑指南,已验证)-程序员宅基地
技术标签: art-pi # RT-Thread PWM RT-Thread Studio
文章目录
开发环境
芯片:STM32H750XBH6
开发板:ART-Pi
RT-Thread Studio: V2.0.0
RT-Thread版本:V4.0.3
STM32 CubeMX: V6.1.1
创建项目
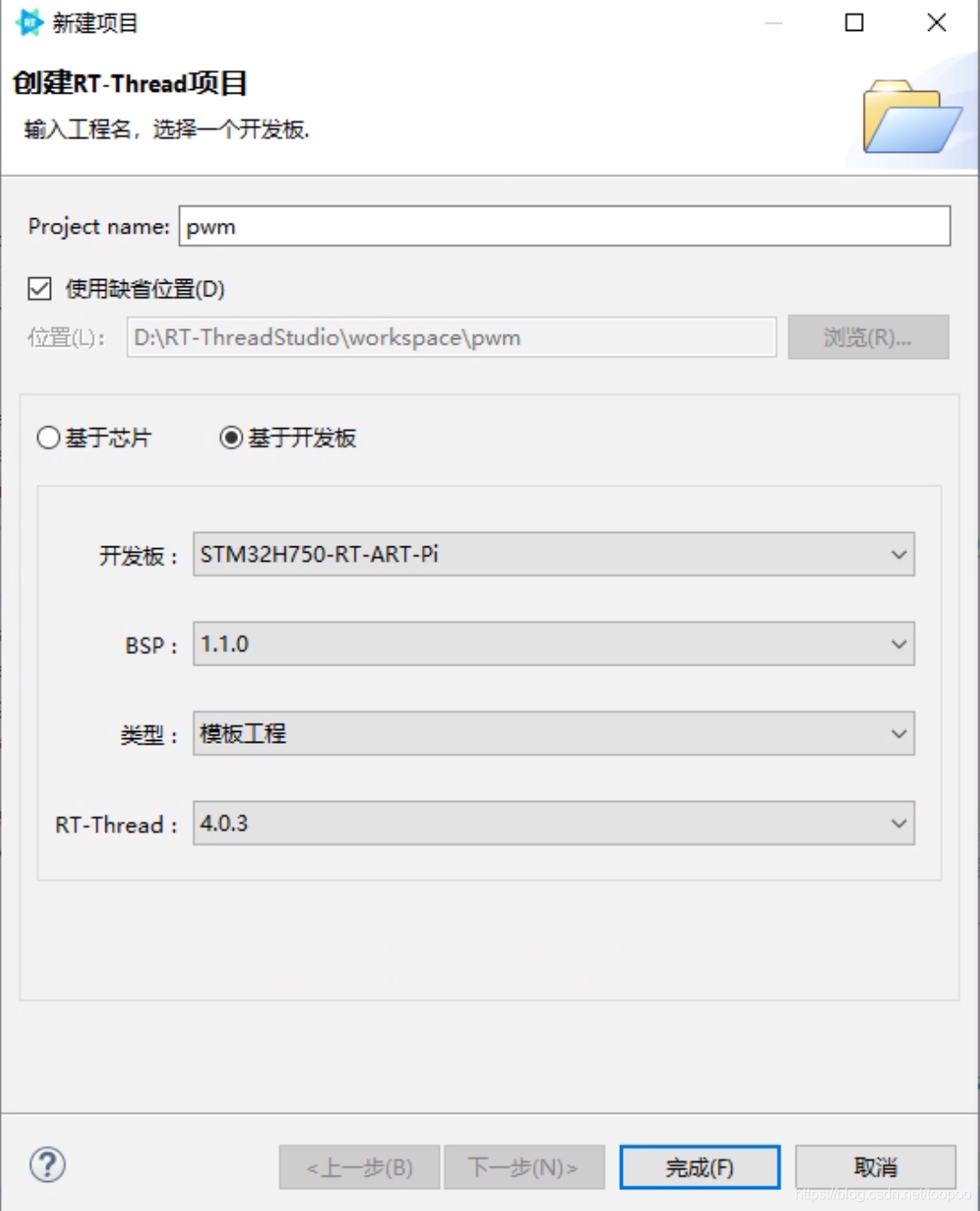
RT-Thread Studio中点击菜单 文件-新建-RT-Thread项目,选择基于ART-Pi 开发板的模板工程。
步骤1:RT-Thread Studio项目设置
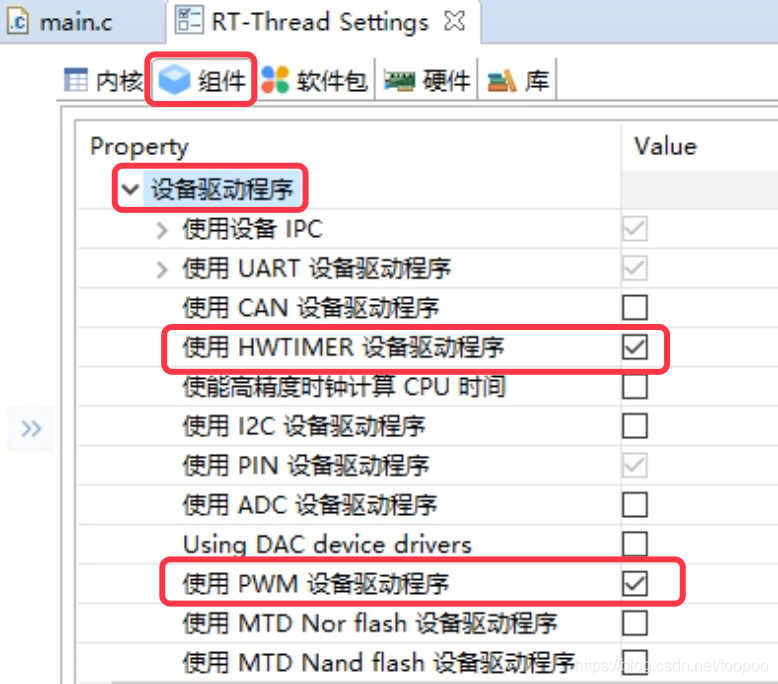
在设置中启用HWTIMER和PWM设备驱动。
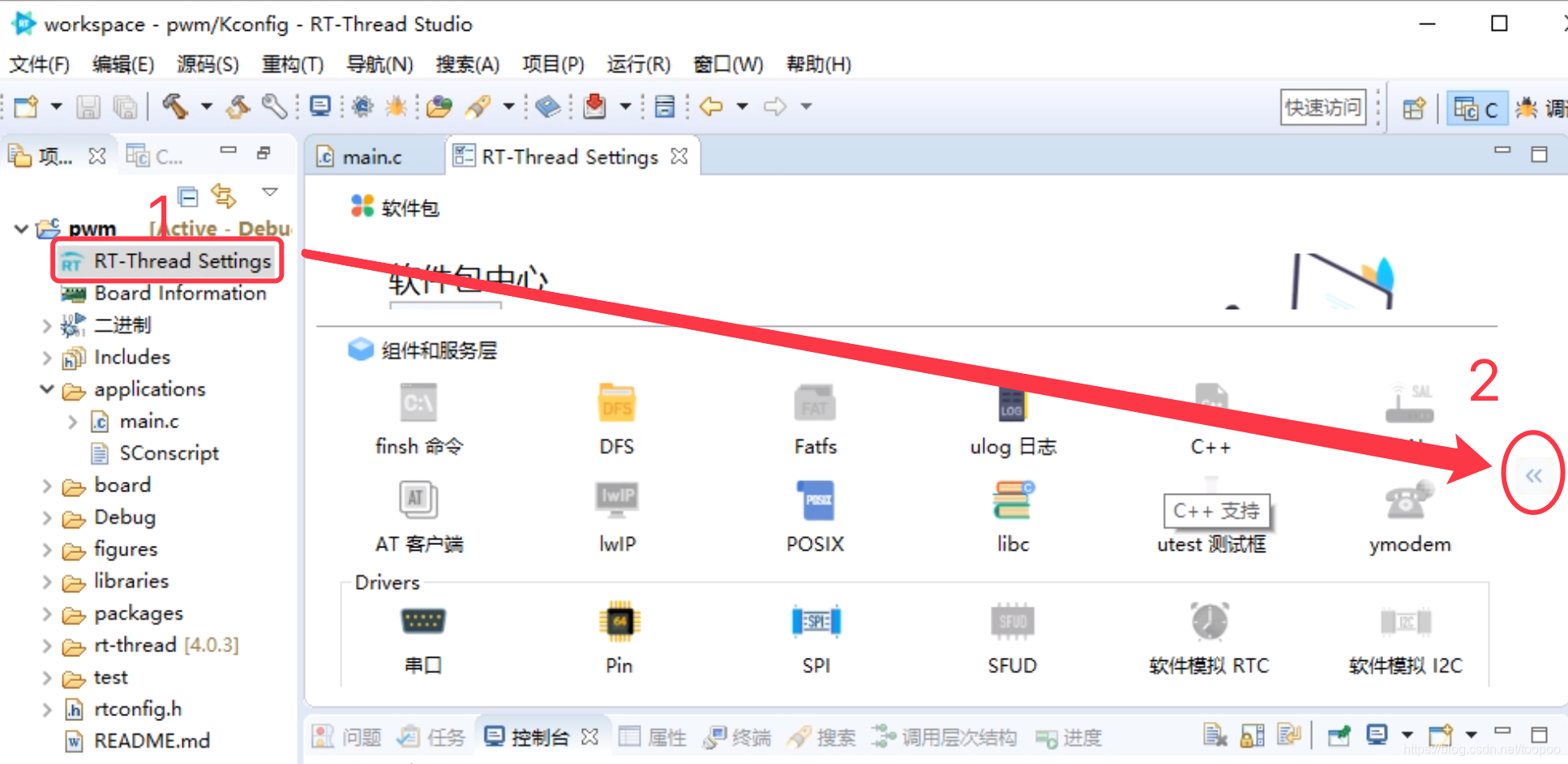
双击项目的RT-Thread Setting,点击右侧箭头
在组件-设备驱动程序中,打开使用HWTIMER设备驱动程序和使用PWM设备驱动程序。
此时我们看到\board\CubeMX_Config\Core\Inc\stm32h7xx_hal_conf.h文件中,
已经启用了两个宏定义:
#define HAL_TIM_MODULE_ENABLED
和
#define HAL_PWR_MODULE_ENABLED
如未启用,请手动取消这两行的注释。
步骤2:打开board.h宏定义
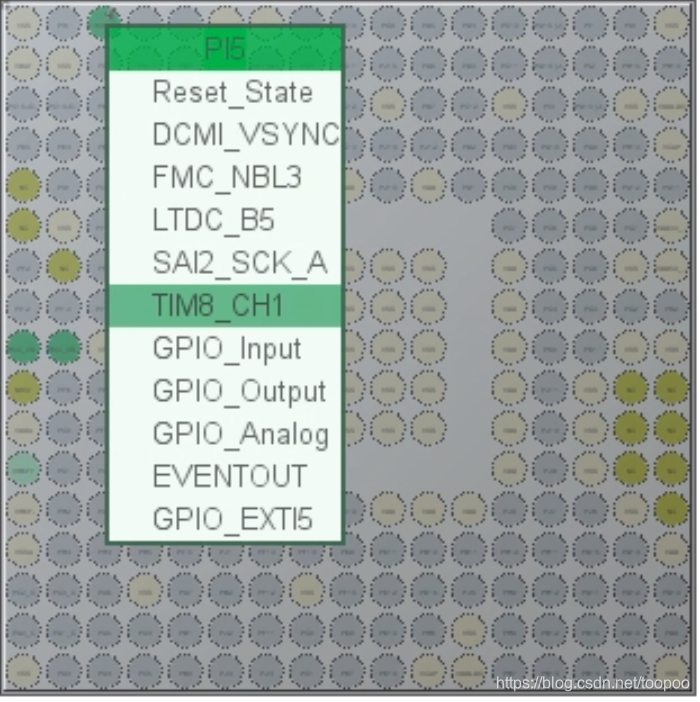
本例打开PI5的PWM输出,对应PWM8的CH1。
在board\board.h中添加如下宏定义:
#define BSP_USING_PWM8
#define BSP_USING_PWM8_CH1
#define BSP_USING_TIM8
步骤3:STM32CubeMX(或者STM32CubeIDE)配置
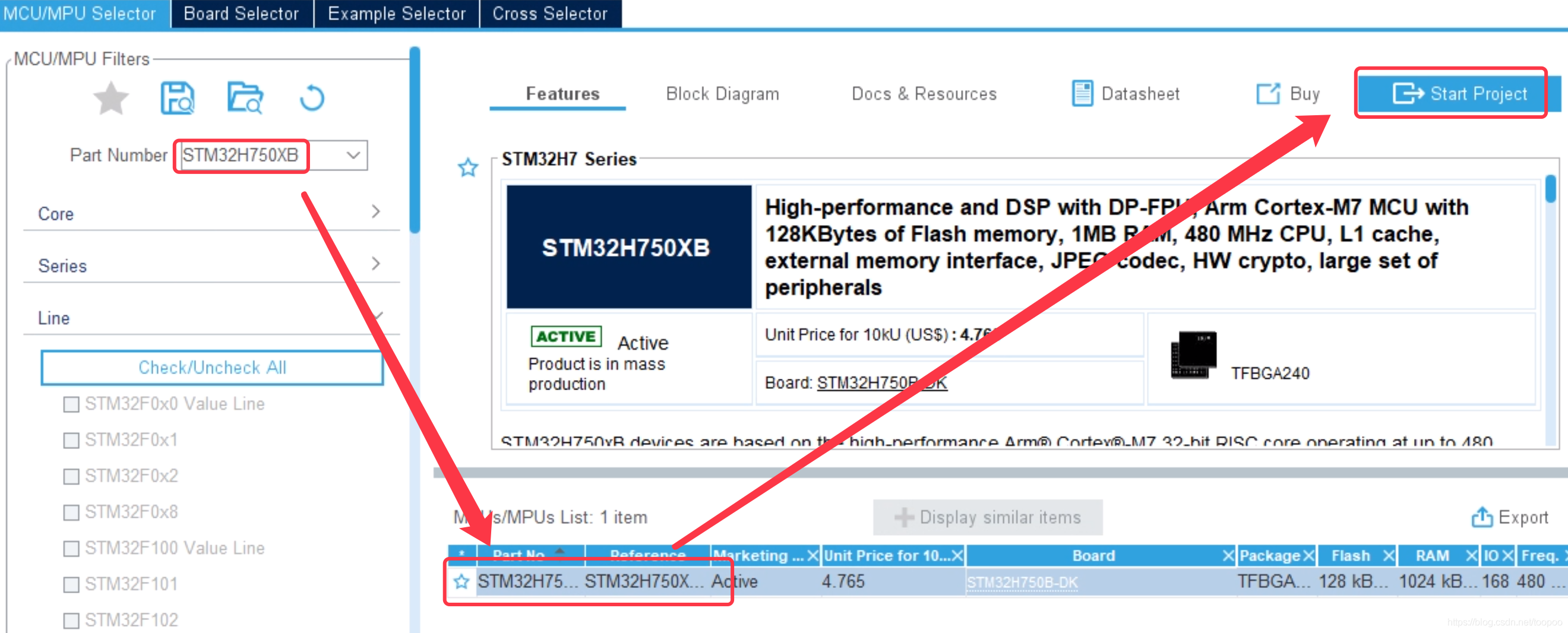
3.0 新建基于STM32H750XBHx的项目。
3.1 在Pinout view中配置PI5为TIM8_CH1
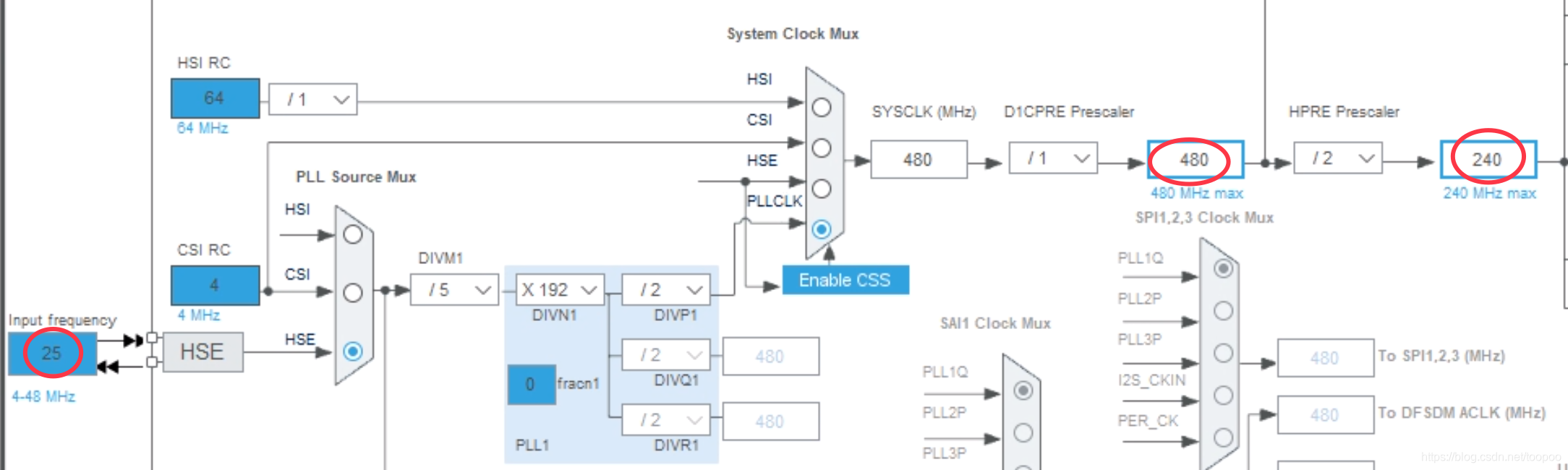
3.2 配置时钟
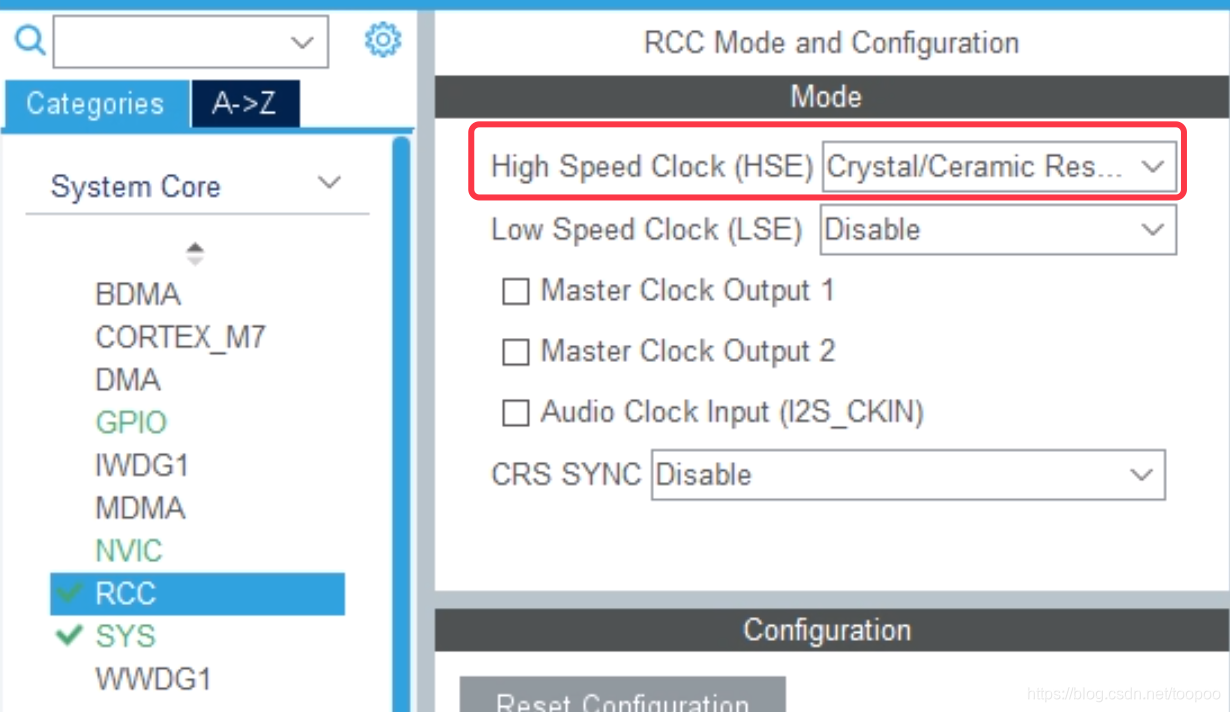
3.3 RCC中配置使用外部高速晶振HSE
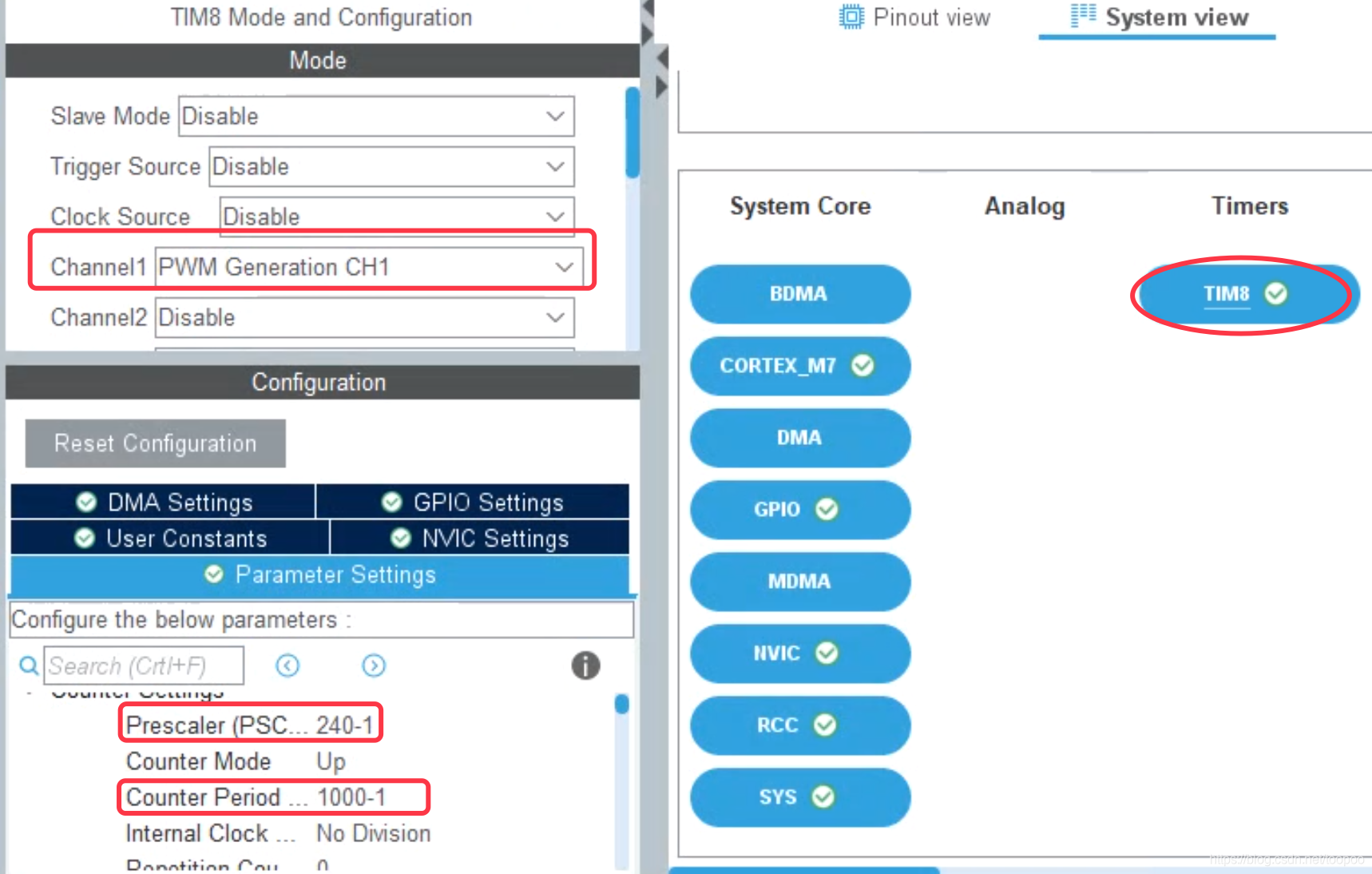
3.4 TIM8配置CH1
TIM8启用CH1
Prescaler设置为240-1
Counter Period设置为1000-1
这样将PWM频率设为1KHz
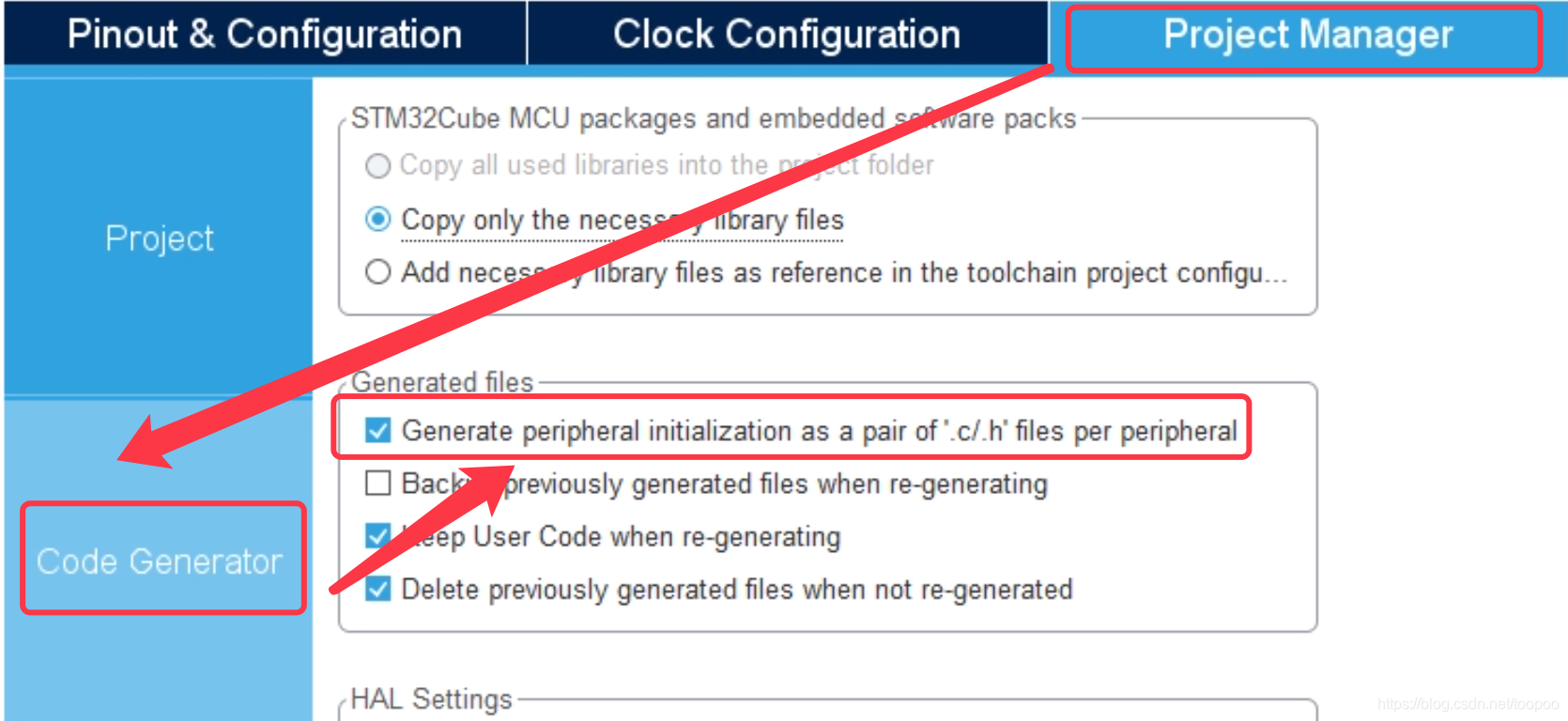
3.5 设置代码输出选项
在Project Manager的Code Generator中,选中Generate peripheral initialization as a pair of '.c/.h' files per peripheral
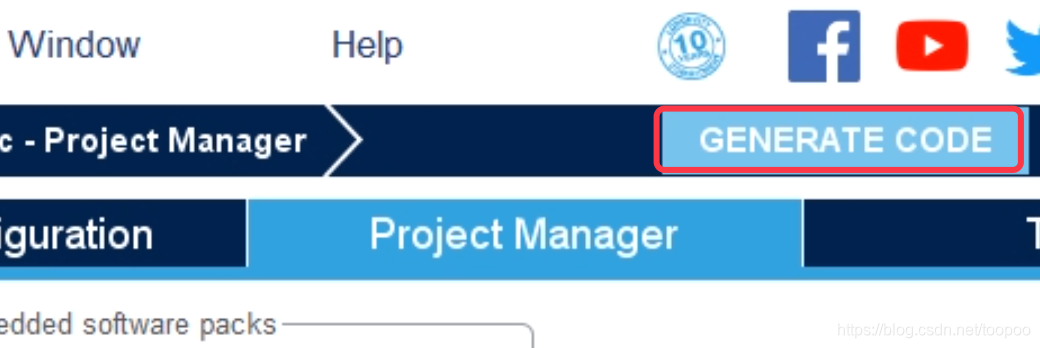
3.6 点击Generate Code
4. 修改board.c和board.h
打开cubeMX导出代码中的Core\Src\tim.c文件
将htim8的声明和如下三个函数复制粘贴到RT-Thread 项目中的board\board.c文件中
TIM_HandleTypeDef htim8;
void MX_TIM8_Init(void)
void HAL_TIM_PWM_MspInit(TIM_HandleTypeDef* htim_pwm)
void HAL_TIM_MspPostInit(TIM_HandleTypeDef* htim)
void HAL_TIM_PWM_MspDeInit(TIM_HandleTypeDef* htim_pwm)
具体函数实现如下(会根据不同的GPIO和PWM Channel有所差异)。
TIM_HandleTypeDef htim8;
void MX_TIM8_Init(void)
{
TIM_MasterConfigTypeDef sMasterConfig = {
0};
TIM_OC_InitTypeDef sConfigOC = {
0};
TIM_BreakDeadTimeConfigTypeDef sBreakDeadTimeConfig = {
0};
htim8.Instance = TIM8;
htim8.Init.Prescaler = 240-1;
htim8.Init.CounterMode = TIM_COUNTERMODE_UP;
htim8.Init.Period = 1000-1;
htim8.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim8.Init.RepetitionCounter = 0;
htim8.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_PWM_Init(&htim8) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterOutputTrigger2 = TIM_TRGO2_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim8, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 0;
sConfigOC.OCPolarity = TIM_OCPOLARITY_LOW;
sConfigOC.OCNPolarity = TIM_OCNPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
sConfigOC.OCIdleState = TIM_OCIDLESTATE_RESET;
sConfigOC.OCNIdleState = TIM_OCNIDLESTATE_RESET;
if (HAL_TIM_PWM_ConfigChannel(&htim8, &sConfigOC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
sBreakDeadTimeConfig.OffStateRunMode = TIM_OSSR_DISABLE;
sBreakDeadTimeConfig.OffStateIDLEMode = TIM_OSSI_DISABLE;
sBreakDeadTimeConfig.LockLevel = TIM_LOCKLEVEL_OFF;
sBreakDeadTimeConfig.DeadTime = 0;
sBreakDeadTimeConfig.BreakState = TIM_BREAK_DISABLE;
sBreakDeadTimeConfig.BreakPolarity = TIM_BREAKPOLARITY_HIGH;
sBreakDeadTimeConfig.BreakFilter = 0;
sBreakDeadTimeConfig.Break2State = TIM_BREAK2_DISABLE;
sBreakDeadTimeConfig.Break2Polarity = TIM_BREAK2POLARITY_HIGH;
sBreakDeadTimeConfig.Break2Filter = 0;
sBreakDeadTimeConfig.AutomaticOutput = TIM_AUTOMATICOUTPUT_DISABLE;
if (HAL_TIMEx_ConfigBreakDeadTime(&htim8, &sBreakDeadTimeConfig) != HAL_OK)
{
Error_Handler();
}
HAL_TIM_MspPostInit(&htim8);
}
void HAL_TIM_PWM_MspInit(TIM_HandleTypeDef* htim_pwm)
{
if(htim_pwm->Instance==TIM8)
{
/* USER CODE BEGIN TIM5_MspInit 0 */
/* USER CODE END TIM5_MspInit 0 */
/* Peripheral clock enable */
__HAL_RCC_TIM8_CLK_ENABLE();
/* USER CODE BEGIN TIM5_MspInit 1 */
/* USER CODE END TIM5_MspInit 1 */
}
}
void HAL_TIM_MspPostInit(TIM_HandleTypeDef* htim)
{
GPIO_InitTypeDef GPIO_InitStruct = {
0};
if(htim->Instance==TIM8)
{
/* USER CODE BEGIN TIM8_MspPostInit 0 */
/* USER CODE END TIM8_MspPostInit 0 */
__HAL_RCC_GPIOI_CLK_ENABLE();
/**TIM8 GPIO Configuration
PI5 ------> TIM8_CH1
*/
GPIO_InitStruct.Pin = GPIO_PIN_5;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.Alternate = GPIO_AF3_TIM8;
HAL_GPIO_Init(GPIOI, &GPIO_InitStruct);
/* USER CODE BEGIN TIM8_MspPostInit 1 */
/* USER CODE END TIM8_MspPostInit 1 */
}
}
/**
* @brief TIM_PWM MSP De-Initialization
* This function freeze the hardware resources used in this example
* @param htim_pwm: TIM_PWM handle pointer
* @retval None
*/
void HAL_TIM_PWM_MspDeInit(TIM_HandleTypeDef* htim_pwm)
{
if(htim_pwm->Instance==TIM8)
{
/* USER CODE BEGIN TIM5_MspDeInit 0 */
/* USER CODE END TIM5_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_TIM8_CLK_DISABLE();
/* USER CODE BEGIN TIM5_MspDeInit 1 */
/* USER CODE END TIM5_MspDeInit 1 */
}
}
然后修改board\board.h,添加如下几行:
void MX_TIM8_Init(void);
void HAL_TIM_PWM_MspInit(TIM_HandleTypeDef* htim_pwm);
void HAL_TIM_PWM_MspDeInit(TIM_HandleTypeDef* htim_pwm);
void HAL_TIM_MspPostInit(TIM_HandleTypeDef* htim);
5. 修改main.c
main.c代码使用一个线程来调节PWM输出,注意首先要导入
board.h头文件,并在main函数中调用MX_TIM8_Init();。
#include <rtthread.h>
#include <rtdevice.h>
#include "drv_common.h"
#include "board.h"
#define LOG_TAG "thread_app"
#define LOG_LVL LOG_LVL_DBG
#include <ulog.h>
#define THREAD_PRIORITY 25
#define THREAD_STACK_SIZE 512
#define THREAD_TIMESLICE 5
#define PWM_DEV_NAME "pwm8" /* PWM设备名称 */
#define PWM_DEV_CHANNEL 1 /* PWM通道 */
struct rt_device_pwm *pwm_dev; /* PWM设备句柄 */
static rt_thread_t pwm_tid;
static void pwm_thread_entry(void *parameter)
{
rt_uint32_t period, pulse, dir;
period = 1000000; /* 1KHz周期为1ms,这里单位是纳秒ns,1ms等于10的6次方纳秒ns*/
pulse = 0; /* PWM脉冲宽度值,单位为纳秒ns */
dir = 1;
/* 查找设备 */
pwm_dev = (struct rt_device_pwm *)rt_device_find(PWM_DEV_NAME);
if (pwm_dev == RT_NULL)
{
rt_kprintf("pwm sample run failed! can't find %s device!\n", PWM_DEV_NAME);
}
rt_kprintf("pwm sample run ! find %s device!\n", PWM_DEV_NAME);
/* 设置PWM周期和脉冲宽度 */
rt_pwm_set(pwm_dev, PWM_DEV_CHANNEL, period, pulse);
/* 使能设备 */
rt_pwm_enable(pwm_dev, PWM_DEV_CHANNEL);
while (1)
{
rt_thread_mdelay(50);
if (dir)
{
pulse += 20000; /* 从0值开始每次增加20000ns */
}
else
{
pulse -= 20000; /* 从最大值开始每次减少20000ns */
}
if (pulse >= period)
{
dir = 0;
// rt_kprintf("pwm sample change direction! to --\n");
}
if (0 == pulse)
{
dir = 1;
// rt_kprintf("pwm sample change direction to ++ !\n");
}
/* 设置PWM周期和脉冲宽度并启动 */
rt_pwm_set(pwm_dev, PWM_DEV_CHANNEL, period, pulse);
rt_pwm_enable(pwm_dev, PWM_DEV_CHANNEL);
}
}
int main(void)
{
MX_TIM8_Init();
pwm_tid = rt_thread_create("pwm_thread",
pwm_thread_entry, RT_NULL,
THREAD_STACK_SIZE,
THREAD_PRIORITY, THREAD_TIMESLICE);
/* 如果获得线程控制块,启动这个线程 */
if (pwm_tid != RT_NULL)
{
//启动线程1
rt_thread_startup(pwm_tid);
LOG_D("pwm_thread created successful");
}
else {
LOG_D("pwm_thread created failed");
}
return RT_EOK;
}
#include "stm32h7xx.h"
static int vtor_config(void)
{
/* Vector Table Relocation in Internal QSPI_FLASH */
SCB->VTOR = QSPI_BASE;
return 0;
}
INIT_BOARD_EXPORT(vtor_config);
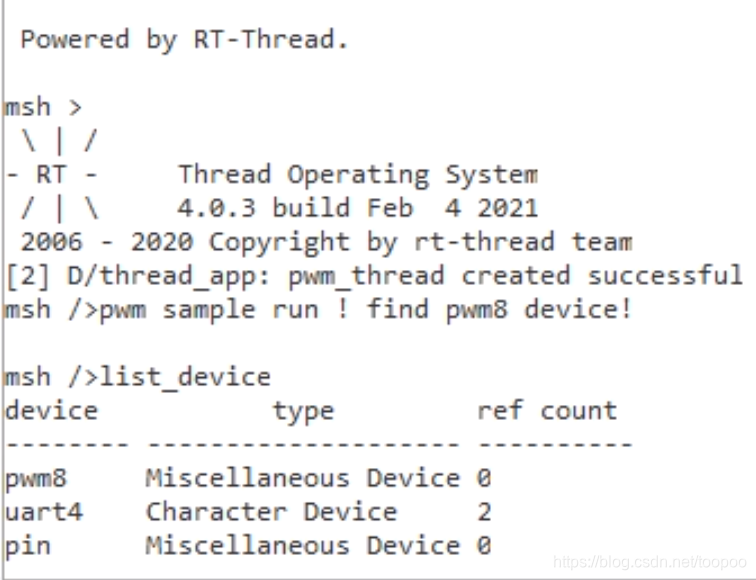
如果项目开启了finsh,可以通过list_device查看到pwm8这个设备,如下图所示。
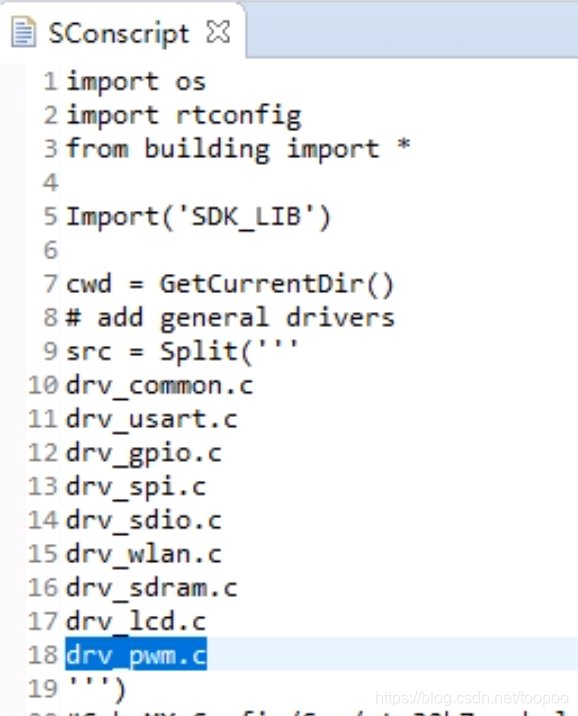
6. 避坑指南
前面说我们创建的是基于ART-Pi开发板的模板工程,那么是有一个需要修改的地方,这一点在目前任何网上一个教程都没有提到。默认情况下,ART-Pi开发板模板工程默认是将libraries\drivers\drv_pwm.c排除在构建之外的,需要修改libraries\drivers\SConscript文件,添加drv_pwm.c文件,才能正确配置pwm设备。如下图。
智能推荐
软件测试流程包括哪些内容?测试方法有哪些?_测试过程管理中包含哪些过程-程序员宅基地
文章浏览阅读2.9k次,点赞8次,收藏14次。测试主要做什么?这完全都体现在测试流程中,同时测试流程是面试问题中出现频率最高的,这不仅是因为测试流程很重要,而是在面试过程中这短短的半小时到一个小时的时间,通过测试流程就可以判断出应聘者是否合适,故在测试流程中包含了测试工作的核心内容,例如需求分析,测试用例的设计,测试执行,缺陷等重要的过程。..._测试过程管理中包含哪些过程
政府数字化政务的人工智能与机器学习应用:如何提高政府工作效率-程序员宅基地
文章浏览阅读870次,点赞16次,收藏19次。1.背景介绍政府数字化政务是指政府利用数字技术、互联网、大数据、人工智能等新技术手段,对政府政务进行数字化改革,提高政府工作效率,提升政府服务质量的过程。随着人工智能(AI)和机器学习(ML)技术的快速发展,政府数字化政务中的人工智能与机器学习应用也逐渐成为政府改革的重要内容。政府数字化政务的人工智能与机器学习应用涉及多个领域,包括政策决策、政府服务、公共安全、社会治理等。在这些领域,人工...
ssm+mysql+微信小程序考研刷题平台_mysql刷题软件-程序员宅基地
文章浏览阅读219次,点赞2次,收藏4次。系统主要的用户为用户、管理员,他们的具体权限如下:用户:用户登录后可以对管理员上传的学习视频进行学习。用户可以选择题型进行练习。用户选择小程序提供的考研科目进行相关训练。用户可以进行水平测试,并且查看相关成绩用户可以进行错题集的整理管理员:管理员登录后可管理个人基本信息管理员登录后可管理个人基本信息管理员可以上传、发布考研的相关例题及其分析,并对题型进行管理管理员可以进行查看、搜索考研题目及错题情况。_mysql刷题软件
根据java代码描绘uml类图_Myeclipse8.5下JAVA代码导成UML类图-程序员宅基地
文章浏览阅读1.4k次。myelipse里有UML1和UML2两种方式,UML2功能更强大,但是两者生成过程差别不大1.建立Test工程,如下图,uml包存放uml类图package com.zz.domain;public class User {private int id;private String name;public int getId() {return id;}public void setId(int..._根据以下java代码画出类图
Flume自定义拦截器-程序员宅基地
文章浏览阅读174次。需求:一个topic包含很多个表信息,需要自动根据json字符串中的字段来写入到hive不同的表对应的路径中。发送到Kafka中的数据原本最外层原本没有pkDay和project,只有data和name。因为担心data里面会空值,所以根同事商量,让他们在最外层添加了project和pkDay字段。pkDay字段用于表的自动分区,proejct和name合起来用于自动拼接hive表的名称为 ..._flume拦截器自定义开发 kafka
java同时输入不同类型数据,Java Spring中同时访问多种不同数据库-程序员宅基地
文章浏览阅读380次。原标题:Java Spring中同时访问多种不同数据库 多样的工作要求,可以使用不同的工作方法,只要能获得结果,就不会徒劳。开发企业应用时我们常常遇到要同时访问多种不同数据库的问题,有时是必须把数据归档到某种数据仓库中,有时是要把数据变更推送到第三方数据库中。使用Spring框架时,使用单一数据库是非常容易的,但如果要同时访问多个数据库的话事件就变得复杂多了。本文以在Spring框架下开发一个Sp..._根据输入的不同连接不同的数据库
随便推点
EFT试验复位案例分析_eft电路图-程序员宅基地
文章浏览阅读3.6k次,点赞9次,收藏25次。本案例描述了晶振屏蔽以及开关电源变压器屏蔽对系统稳定工作的影响, 硬件设计时应考虑。_eft电路图
MR21更改价格_mr21 对于物料 zba89121 存在一个当前或未来标准价格-程序员宅基地
文章浏览阅读1.1k次。对于物料价格的更改,可以采取不同的手段:首先,我们来介绍MR21的方式。 需要说明的是,如果要对某一产品进行价格修改,必须满足的前提条件是: ■ 1、必须对价格生效的物料期间与对应会计期间进行开启; ■ 2、该产品在该物料期间未发生物料移动。执行MR21,例如更改物料1180051689的价格为20000元,系统提示“对于物料1180051689 存在一个当前或未来标准价格”,这是因为已经对该..._mr21 对于物料 zba89121 存在一个当前或未来标准价格
联想启天m420刷bios_联想启天M420台式机怎么装win7系统(完美解决usb)-程序员宅基地
文章浏览阅读7.4k次,点赞3次,收藏13次。[文章导读]联想启天M420是一款商用台式电脑,预装的是win10系统,用户还是喜欢win7系统,该台式机采用的intel 8代i5 8500CPU,在安装安装win7时有很多问题,在安装win7时要在BIOS中“关闭安全启动”和“开启兼容模式”,并且安装过程中usb不能使用,要采用联想win7新机型安装,且默认采用的uefi+gpt模式,要改成legacy+mbr引导,那么联想启天M420台式电..._启天m420刷bios
冗余数据一致性,到底如何保证?-程序员宅基地
文章浏览阅读2.7k次,点赞2次,收藏9次。一,为什么要冗余数据互联网数据量很大的业务场景,往往数据库需要进行水平切分来降低单库数据量。水平切分会有一个patition key,通过patition key的查询能..._保证冗余性
java 打包插件-程序员宅基地
文章浏览阅读88次。是时候闭环Java应用了 原创 2016-08-16 张开涛 你曾经因为部署/上线而痛苦吗?你曾经因为要去运维那改配置而烦恼吗?在我接触过的一些部署/上线方式中,曾碰到过以下一些问题:1、程序代码和依赖都是人工上传到服务器,不是通过工具进行部署和发布;2、目录结构没有规范,jar启动时通过-classpath任意指定;3、fat jar,把程序代码、配置文件和依赖jar都打包到一个jar中,改配置..._那么需要把上面的defaultjavatyperesolver类打包到插件中
VS2015,Microsoft Visual Studio 2005,SourceInsight4.0使用经验,Visual AssistX番茄助手的安装与基本使用9_番茄助手颜色-程序员宅基地
文章浏览阅读909次。1.得下载一个番茄插件,按alt+g才可以有函数跳转功能。2.不安装番茄插件,按F12也可以有跳转功能。3.进公司的VS工程是D:\sync\build\win路径,.sln才是打开工程的方式,一个是VS2005打开的,一个是VS2013打开的。4.公司库里的线程接口,在CmThreadManager.h 里,这个里面是我们的线程库,可以直接拿来用。CreateUserTaskThre..._番茄助手颜色