ROS里程计消息nav_msgs/Odometry的可视化方法_nav_msgs::odometry-程序员宅基地
ROS中里程计的消息类型为nav_msgs/Odometry,该消息类型具有以下结构:
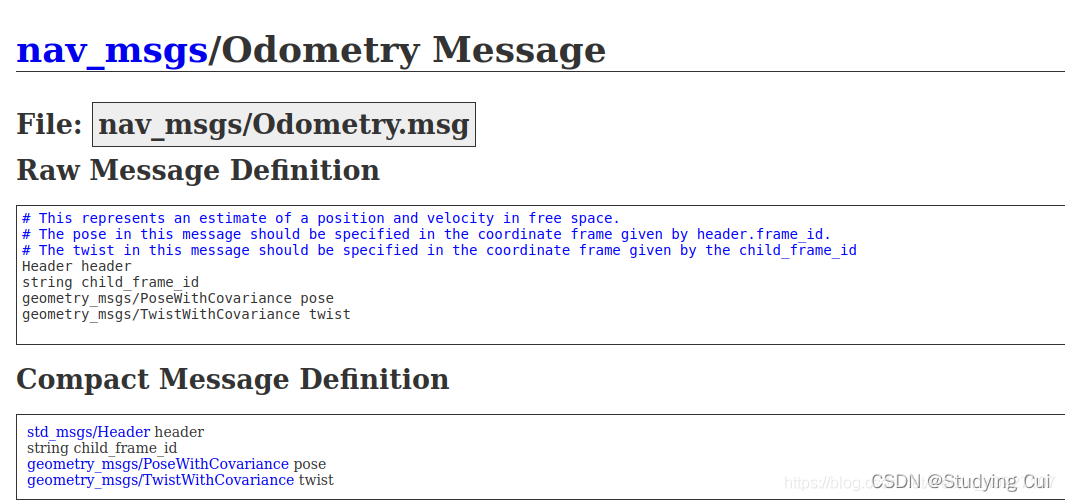
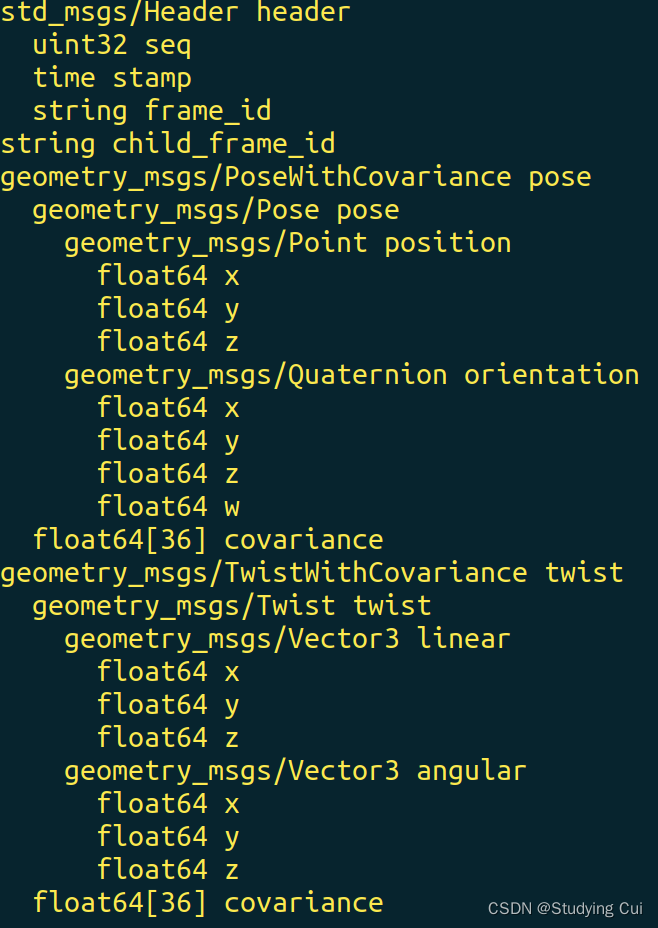
可以看到,里程计消息中的pose包含了位置pose.position和姿态pose.orientation
在ROS中,有一种常用消息类型为nav_msgs/Path,可视化的方法为:
①在一个节点中订阅发布的里程计话题消息nav_msgs/Odometry
②创建geometry_msgs::PoseStamped对象接收里程计的位姿
③创建nav_msgs/Path对象作为容器,将赋值后的对象push_back进nav_msgs/Path中并发布
然后即可在rviz中订阅包含nav_msgs/Path的话题并可视化轨迹
1.新建ROS工作空间
mkdir -p path_ws/src
cd path_ws
catkin_make
cd src
catkin_create_pkg path_3d roscpp rospy std_msgs nav_msgs geometry_msgs2.在path_3d/src中编写消息收发节点文件path_3d.cpp
#include <ros/ros.h>
#include <nav_msgs/Path.h>
#include <std_msgs/String.h>
#include <nav_msgs/Odometry.h>
#include <geometry_msgs/PoseStamped.h>
#include <tf/transform_broadcaster.h>
#include <tf/tf.h>
nav_msgs::Path path;
ros::Publisher path_pub;
void pathCallback(const nav_msgs::Odometry::ConstPtr& odom_3d)
{
geometry_msgs::PoseStamped position_3d;
position_3d.pose.position.x = odom_3d->pose.pose.position.x;
position_3d.pose.position.y = odom_3d->pose.pose.position.y;
position_3d.pose.position.z = odom_3d->pose.pose.position.z;
position_3d.pose.orientation = odom_3d->pose.pose.orientation;
position_3d.header.stamp = odom_3d->header.stamp;
position_3d.header.frame_id = "map";
path.poses.push_back(position_3d);
path.header.stamp = position_3d.header.stamp;
path.header.frame_id = "map";
path_pub.publish(path);
std::cout << odom_3d -> header.stamp << ' ' << odom_3d->pose.pose.position.x << ' ' << odom_3d->pose.pose.position.y << ' ' << odom_3d->pose.pose.position.z << std::endl;
}
int main (int argc, char **argv)
{
ros::init (argc, argv, "showpath");
ros::NodeHandle ph;
path_pub = ph.advertise<nav_msgs::Path>("odom3d_path", 10, true);
ros::Subscriber odomSub = ph.subscribe<nav_msgs::Odometry>("/odometry_3d", 10, pathCallback); //订阅里程计话题信息,其中"/odometry_3d"是自己发布的里程计话题名,别忘了修改
ros::Rate loop_rate(1000);
while(ros::ok())
{
ros::spinOnce();
loop_rate.sleep();
}
return 0;
}
3.path_3d文件夹目录中的CMakeLists.txt如下:
cmake_minimum_required(VERSION 2.8.3)
project(path_3d)
## Compile as C++11, supported in ROS Kinetic and newer
# add_compile_options(-std=c++11)
find_package(catkin REQUIRED COMPONENTS
geometry_msgs
roscpp
rospy
std_msgs
message_generation
)
## Generate added messages and services with any dependencies listed here
generate_messages(
DEPENDENCIES
geometry_msgs std_msgs
)
catkin_package(
INCLUDE_DIRS include
LIBRARIES path_3d
CATKIN_DEPENDS geometry_msgs roscpp rospy std_msgs
DEPENDS system_lib
)
include_directories(
include
${catkin_INCLUDE_DIRS}
)
add_executable(path_3d src/path_3d.cpp) #${PROJECT_NAME}_node
target_link_libraries(path_3d ${catkin_LIBRARIES}) # ${PROJECT_NAME}_node
add_dependencies(path_3d beginner_tutorials_generate_messages_cpp) #path_3d_node
4.在工作空间中编译功能包
// 打开命令行
// 进入工作空间最上层目录
cd path_ws
// 执行一下 source 命令
source devel/setup.bash
// 编译工作空间下的所有功能包
catkin_make
// 单独编译工作空间下的 path_3d 功能包
catkin_make -DCATKIN_WHITELIST_PACKAGES="path_3d"5.启动节点、在rviz中订阅odom3d_path话题,即可查看可视化数据
// 终端中启动roscore
roscore
// 另一个终端启动节点
rosrun path_3d path_3d
// 在数据包路径下,播放带有 nav_msgs/Odometry 消息的数据包
rosbag play 你自己需要可视化的数据包.bag
// 第三个终端,启动rviz,frame选择map,订阅发布的odom3d_path话题
rviz智能推荐
浏览器数据库indexedDB+vue实现简单的新增、删除和获取数据列表_vue2使用indexdb-程序员宅基地
文章浏览阅读3.1k次,点赞4次,收藏8次。代码<!DOCTYPE html><html lang="en"> <head> <meta charset="UTF-8"> <title>Document</title> <style> .tips{ position: fixed; right: 0;..._vue2使用indexdb
Linux下的NFS服务(包含windows10下的nfs搭建)_win10搭建nfs服务器-程序员宅基地
文章浏览阅读2.2k次,点赞2次,收藏4次。Linux下的NFS服务_win10搭建nfs服务器
ArcEngine添加指北针_arcengine指北针-程序员宅基地
文章浏览阅读2.9k次。程序主界面如下图所示:主界面代码:using System;using System.Collections.Generic;using System.ComponentModel;using System.Data;using System.Drawing;using System.Linq;using System.Text;using System.Threading.Ta..._arcengine指北针
解决Android Studio版本兼容问题(低版本的AS打不开高版本的项目)_android studio低版本可以运行高版本文件吗-程序员宅基地
文章浏览阅读2.3w次,点赞5次,收藏39次。最近在使用Android Studio开发中遇到了一些小的问题,就是别人的项目在自己这里打不开的情况,小编在这里给发大家提供一套自己的解决方法,希望对你们有所帮助。(更改的内容就是你现在的自己的项目保持一致),一共有三处修改的地方: 下边是一个AS项目的目录(你要打开的项目): 1、第一个要更改的地方就是上图所示的位置: 使用notepad++打开,更改下图所示的内容: 将上边区域的_android studio低版本可以运行高版本文件吗
书的知识-程序员宅基地
文章浏览阅读904次。书的知识书的知识开本:开本指书刊幅面的规格大小,即一张全开的印刷用纸裁切成多少页。常见的有三十二开(多用于一般书籍)、十六开(多用于杂志)、六十四开(多用于中小型字典、连环画)。版式:即书籍的规格式样,包括开本、排式、版面、插图等。版本:指某种书不同的本子。有的书一出版就有几种形式;有的书在出版后,由于进行修改,再印时改变了原来的版本。版次:第一次出版印刷的书写有“某年某月第一版,第一次印刷”,这
datalist自增序号_为什么用datalist进行编号-程序员宅基地
文章浏览阅读1.5k次。 序号 模板名称 模板类型 应用时间_为什么用datalist进行编号
随便推点
ROS探索_ros explore-程序员宅基地
文章浏览阅读647次。http://wiki.ros.org/ROS/Tutorialshttp://blog.csdn.net/column/details/ros-explore.html_ros explore
c语言周林答案,C语言程序设计实训教程教学课件作者周林ch06函数课件.ppt-程序员宅基地
文章浏览阅读68次。C语言程序设计实训教程教学课件作者周林ch06函数课件.ppt1)自动变量(auto变量) 局部变量,如果不专门声明存储类别,都是动态地分配存储空间的 调用函数时,系统会给局部变量分配存储空间,调用结束时就自动释放空间。因此这类局部变量称为自动变量 自动变量用关键字auto作存储类别的声明 2. 局部变量 第六章 函 数 6.6 变量的存储类型及作用域 2)静态局部变量(static局部变..._c语言程序设计周林课后答案
奔驰柏林之声旋转高音喇叭音响 成都蔚一车改-程序员宅基地
文章浏览阅读185次。适配车型:奔驰S级新E级C级GLC均可升级改装原厂柏林之声音响套装 柏林之声:奔驰原厂柏林之声被誉为音响界的劳斯莱斯,无损安装不并线不破线,可恢复出厂状态,不影响质保,旋转高音2个柏林高音2个柏林中音7个柏林低音2个喇叭罩8个,13件套喇叭套装,增加功放音质提升7倍。 成都蔚..._成都蔚一车改
SpringBoot(二):web综合开发_o.s.b.c.l.loggingapplicationlistener : cannot set -程序员宅基地
文章浏览阅读328次。一、SpringBoot(二):web综合开发上篇文章介绍了Spring boot初级教程:spring boot(一):入门篇,方便大家快速入门、了解实践Spring boot特性;本篇文章接着上篇内容继续为大家介绍spring boot的其它特性(有些未必是spring boot体系桟的功能,但是是spring特别推荐的一些开源技术本文也会介绍),对了这里只是一个大概的介绍,特别详细的使用我..._o.s.b.c.l.loggingapplicationlistener : cannot set level 'mapper:debug' for
Microsoft Security Essentials Beta 出自微软的单机版缉毒尖兵-程序员宅基地
文章浏览阅读129次。Microsoft Security Essentials Beta (以下简称:MSE)的官方网站才刚刚上线,虽然网站上公布在 Beta 阶段会针对几个国家区域提供测试下载,但是到本文开始前,我们还无法通过正常的 URL 来获取该软件。不过好心的网友已经提供了下载方法,只需要在访问 MSE 官方网站地址的后面加上一个语言标示就可以点击..._msefsc
nfs挂载报错failed: Permission denied_nfs挂载后访问提示权限不够-程序员宅基地
文章浏览阅读3.3k次。nfs挂载报错failed: Permission denied_nfs挂载后访问提示权限不够