搭建V2P及中青看点教程_v2p如何安装boxjs-程序员宅基地
青龙安装部署教程-------点击跳转
没服务器的先自行购买,腾讯云2H4G8M首年74–点击购买
QQ交流:1014549449 --------------点击跳转
安装 docker
1.连接ssh输入
curl -sSL https://get.daocloud.io/docker | sh
2.启动 docker
systemctl start docker
3.安装 docker-compose
sudo curl -L "https://github.com/docker/compose/releases/download/1.24.1/docker-compose-$(uname -s)-$(uname -m)" -o /usr/local/bin/docker-compose
4.授权
sudo chmod +x /usr/local/bin/docker-compose
安装 v2p
1.创建目录 并且进入目录
mkdir /elecv2p && cd /elecv2p
2.创建文件夹 docker-compose.yaml
touch docker-compose.yaml
3.编辑 docker-compose.yaml 文件 (小白直接进宝塔找到文件进行编辑保存即可略过345步骤)
vi docker-compose.yaml
按键盘 insert 进入编辑状态

4.写入内容
version: '3.3'
services:
elecv2p:
image: elecv2/elecv2p
container_name: v2p
restart: always
environment:
- TZ=Asia/Shanghai
ports:
- "8100:80"
- "8001:8001"
- "8002:8002"
volumes:
- "/elecv2p/JSFile:/usr/local/app/script/JSFile"
- "/elecv2p/Lists:/usr/local/app/script/Lists"
- "/elecv2p/Store:/usr/local/app/script/Store"
- "/elecv2p/Shell:/usr/local/app/script/Shell"
- "/elecv2p/rootCA:/usr/local/app/rootCA"
- "/elecv2p/efss:/usr/local/app/efss"
5.保存
按键盘 Esc 再输入 :wq
6.启动容器
docker-compose up -d
7.去自己服务器商安全组开启端口8100、8001、8002
端口介绍
v2p控制台管理界面:你机器的ip地址:8100, 示例 :127.0.0.1:8100
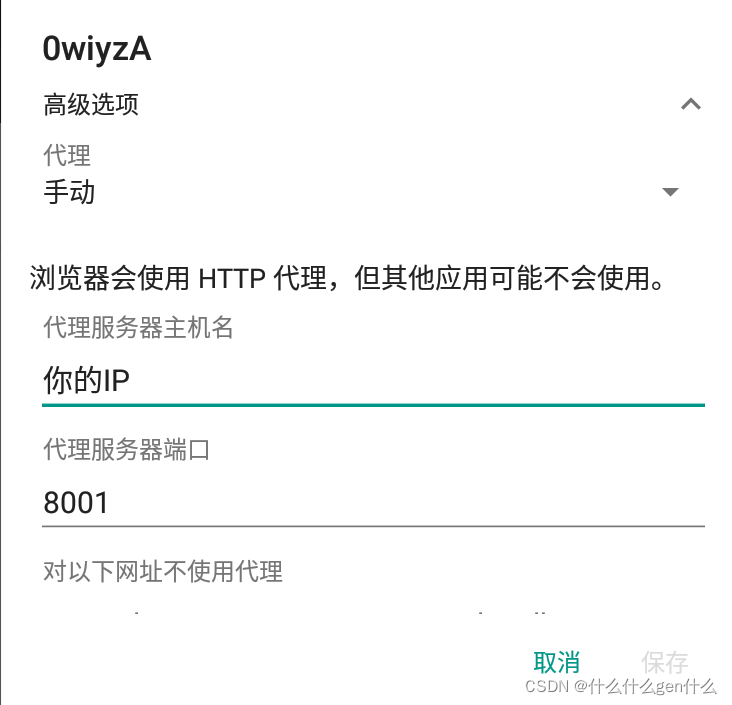
v2p抓包代理端口:你机器的ip地址:8001, 示例 :127.0.0.1:8001
v2p代理请求查看端口:你机器的ip地址:8002, 示例 :127.0.0.1:8002
8.你的IP:8100 进入 v2p界面
在 MITM 列 生成证书

在 OVERVIEW 列开启代理 8001、8002

MITM列 查看证书是否开启成功

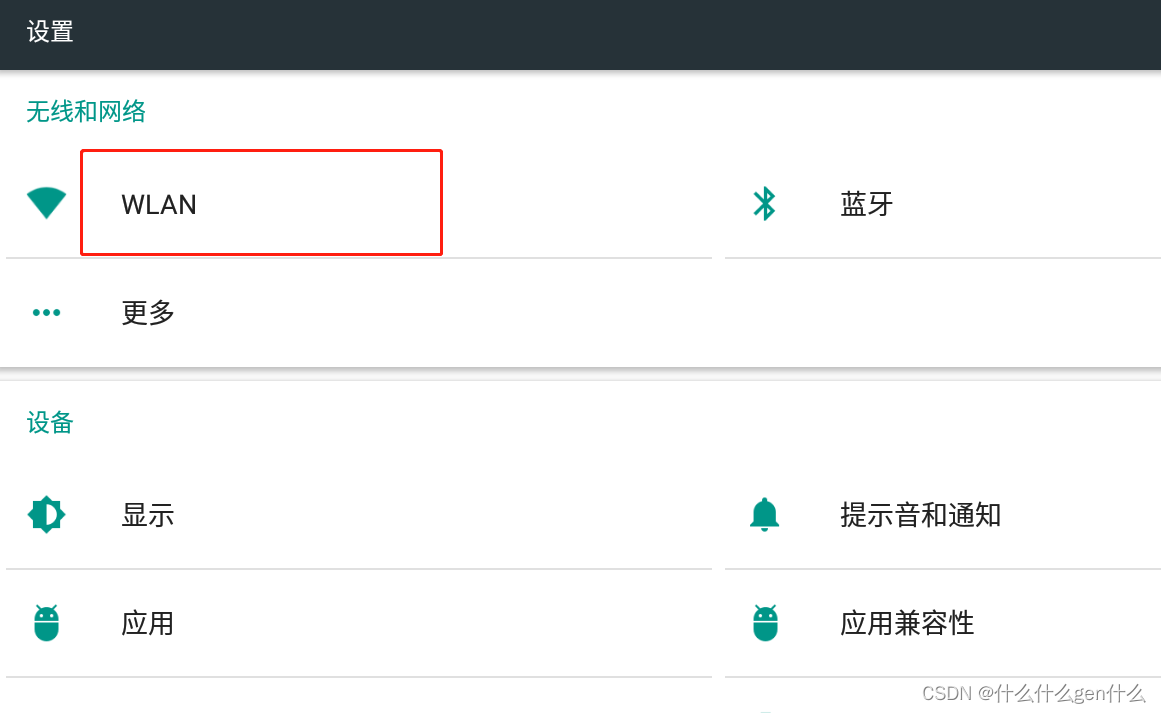
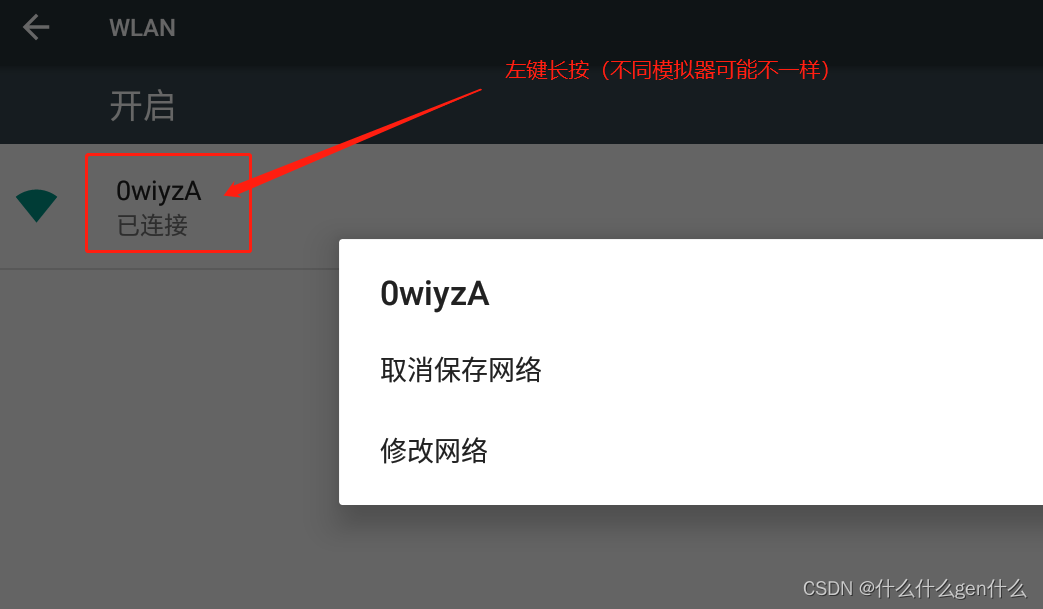
9.进入手机模拟器【不建议使用物理机】
下载证书 http://你的IP:8100/crt 并且安装

10.配置 boxjs 的 v2p 版抓包cookie
下载 (压缩文件,自己解压下)
https://cxgc.top/upload/2021/12/boxjs.ev-037d2d9ce1f8458aac6f40b4659aac3a.zip
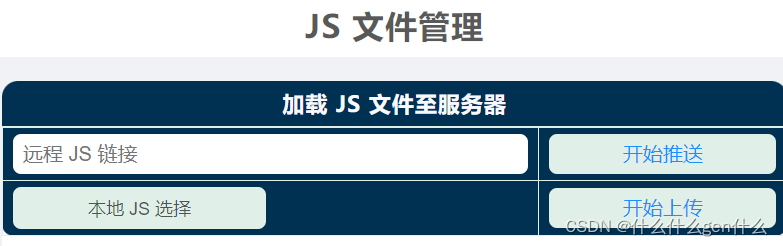
11.在 JSMANAGE 列 本地JS选择 上传下载并解压出来的 js
网络好的可以选择远程JS链接 https://raw.githubusercontent.com/elecV2/elecV2P-dei/master/examples/JSTEST/boxjs.ev.js
RULES 列 点 + 号 设置规则模板
host.com
boxjs.ev.js

MITM 列设置

中青看点教程
添加 v2p添加中青重写和定时任务
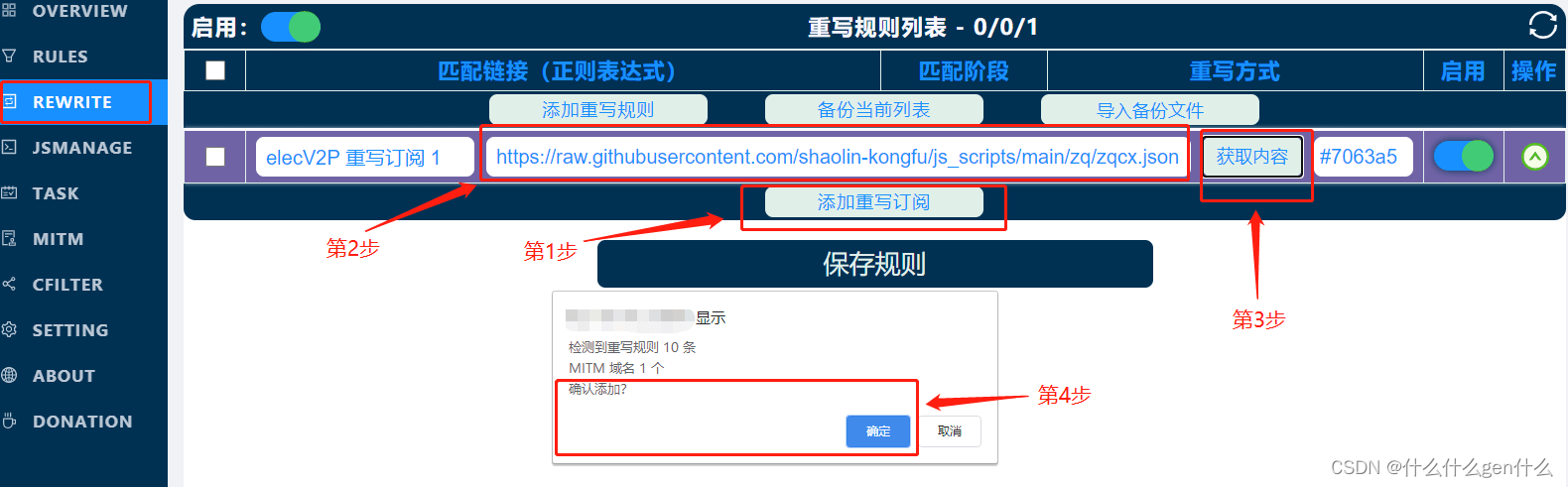
REWRITE 列 添加重写订阅地址
https://raw.githubusercontent.com/shaolin-kongfu/js_scripts/main/zq/zqcx.json
下载不下来的话,可以用我这个订阅地址
https://jdwxx.github.io/jd_job/zqkd/Backup/zqcx.json
TASK 列添加定时任务
少林寺中青安卓版v2p任务定时订阅地址:(注意宝箱和签到有冲突,抓的时候只能开一个)
https://raw.githubusercontent.com/shaolin-kongfu/js_scripts/main/zq/zq_cron.json
下载不下来的话,可以用这个订阅地址
https://jdwxx.github.io/jd_job/zqkd/Backup/zq_cron.json
回到MITM 列 添加需要解析的域名

模拟器打开 青看点APP 【v2p会自动给你抓包并保存所需要的参数】
开始抓包:
签到:zqqd.js(调用zqqdbody)
进入app点击签到,显示增加金币,则获取body成功!成功后马上回到v2p登录界面,点击TASK,把签到脚本的重写zqqdbody关掉。
阅读文章,看视频:zqwz.js(调用zqwzbody,zq_timebody)
进入app点击文章、视频获取body:
注意:请务必抓取阅读时长,否则容易黑号,进入app阅读一分钟左右会抓取。具体操作:首页随便点击新闻链接进入,等待60s,大概是右下红包转2圈,点击红包进入后返回就可以了。这个时候到v2p界面,点击JSMANAGE,查看是否已经抓取到这两个常量。此时wzbody内理论上只有一个body。再看zq_timebody里也是一个body(注意这里面的body一定不要多只有一个就行了,多的删掉,多和没有都容易黑号),下面就是耗时的抓取wzbody时间,首页点击各个新闻的连接可以秒进秒出,如果怕黑号可以减少抓取量。
视频的body要点进去博主的主页单独看,才抓得到。
app-下方第二个视频图标,那里有很多个一起竖排,一个个点进去发布者主页看视频。
看看赚:zqkkz.js(调用zqlookStartbody)
点击看看赚某一任务获取body。
每日任务里面的xx送好礼也是看看赚,用看看赚去抓。
注意:如果找不到看看赚,浏览赚,搜索赚的,先退出账号,点击APP下方的任务,看看赚就显示出来了,然后点击看看赚,提示用微信登录,登录后千万不要退出来,一直把看看赚,浏览赚,搜索赚的任务做完再退出来!
浏览赚:zqllz.js(调用zqllzbody)
app-看看赚上方浏览赚-去白拿。
定时建议:随意,一天一次即可。
搜索赚:zqssz.js(调用zqsszbody)
app-看看赚上方搜索赚-选择带?图标任务-去搜索,随便选一个热词搜索即可退出。
搜索赚只支持带(火苗)图标任务。
任务宝箱奖励:zqbox.js(调用zqboxbody)
app下方点击赚钱图标,在每日任务中点击所有可领取的奖励,获取body,明天再跑一次脚本试试
注意:任务宝箱重写会与签到脚本的重写冲突,抓取任务宝箱body之前记得把签到脚本的重写关掉。
自动提现:zq_withdraw.js(调用zq_withdraw,zq_cash)
定时确保在脚本运行之前完成即可,一天一次
打开app进入提现页面,选择对应金额,点击立即提现(不管当日是否已经提现,都能抓),到变量中查看到有zq_withdraw即可
注意:多账号用户抓包zq_withdraw时需要与zq_cookie账号顺序一致
zq_cash不填默认0.3元,填的话有0.3,30两个选项(boxjs订阅中可直接修改,没有订阅的话直接新建变量即可)
其它任务不用抓包,都是调用的zq_cookie。
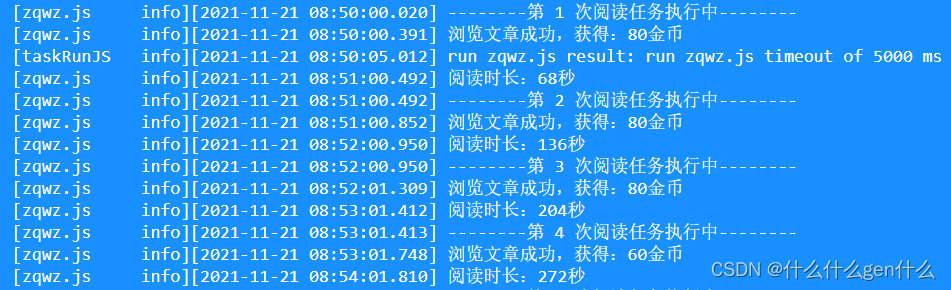
抓完所有的包,脚本就会按照定时自己跑啦,你可以去"OVERVIEW-程序运行日志"进行查看哦。
QQ交流:1014549449 --------------点击跳转
QQ交流:1014549449 --------------点击跳转
QQ交流:1014549449 --------------点击跳转
智能推荐
Pytorch中的register_buffer()-程序员宅基地
文章浏览阅读2.4w次,点赞185次,收藏333次。Pytorch中的register_buffer1.register_buffer( )的使用随着例子边看边讲例子1:使用类成员变量(类成员变量并不会在我们的model.state_dict(),即无法保存)例子2:使用类成员变量(类成员变量并不会随着model.cuda()复制到gpu上)例子3:使用register_buffer()总结2.与pa1.register_buffer( )的使用回顾模型保存:torch.save(model.state_dict()),model.state_dict(_register_buffer
HTML 表单标签_html表单标签-程序员宅基地
文章浏览阅读7.8k次,点赞17次,收藏70次。一、什么是表单标签表单是用来采集用户的输入数据,然后将数据提交给服务器二、表单的组成一个表单有三个基本组成部分: ①表单标签:这里面包含了处理表单数据所用程序的URL以及数据提交到服务器的方法。 ②表单域:包含了文本框、密码框、隐藏域、多行文本框、复选框、单选框、下拉选择框和文件上传框等。 ③表单按钮:包括提交按钮、复位按钮和一般按钮;三、表单标签表单标签<form></form>功能:用于申明表单,定义采集数据的范围,也就是<form>和</form>里面包含的数据_html表单标签
python控制小爱同学_从企业微信机器人到小爱同学,用 Serverless 实现生活智能化!...-程序员宅基地
文章浏览阅读1.2k次。通过定时触发器,可以简单快速地定制一个企业微信机器人。我们可以用它来实现喝水、吃饭提醒等小功能,还能实现定时推送新闻、天气,甚至是监控告警的小功能。使用企业微信机器人在企业微信中,选择添加机器人:之后,我们可以根据文档进行企业微信机器人的基础功能定制:以下是用 curl 工具往群组推送文本消息的示例(注意要将 url 替换成机器人的 webhook 地址,content 必须是 utf8 编码):..._小爱同学api python
Linux下shell脚本:bash的介绍和使用(详细)-程序员宅基地
文章浏览阅读6w次,点赞126次,收藏713次。Shell:一般我们是用图形界面和命令去控制计算机,真正能够控制计算机硬件(CPU、内存、显示器等)的只有操作系统内核(Kernel),由于安全、复杂、繁琐等原因,用户不能直接接触内核,需要另外再开发一个程序,让用户直接使用这个程序;该程序的作用就是接收用户的操作(点击图标、输入命令),并进行简单的处理,然后再传递给内核,内核和用户之间就多了一层“中间代理”,Shell 其实就是一种脚本语言,也是..._bash
Linux字符设备驱动框架之IIC总线驱动框架_linux iic 设备是字符设备吗-程序员宅基地
文章浏览阅读621次。目录1、I2C简介2、I2C驱动框架2.1、I2C核心2.1.1、I2C bus初始化2.1.2 IIC核心提供的接口函数2.2 IIC总线驱动2.2.1 I.MX6U 的 I2C 适配器驱动分析2.3、IIC设备驱动2.3.1、I2C设备驱动解析2.3.2、I2C 设备驱动编写流程1、i2c设备信息描述2、i2c设备数据收发处理流程2.3.3、I2C设备驱动实例1、参考链接:https://www.cnblogs.com/linfeng-learning/p/9523046.html#_label22_linux iic 设备是字符设备吗
zynq使用lwip远程更新flash_zynq lwip-程序员宅基地
文章浏览阅读2.7k次,点赞2次,收藏13次。1.目的zynq通过使用以太网实现远程更新flash,同时实现不断电重启,方便用户升级2.硬件环境vivado2018.2使用zynq7开发板zedboard,只需要搭建最小系统包括以太网、uart、flash控制器、ddr3.软件环境搭建硬件环境后,生成bit,导出到sdk该测试环境基于echo模板改动4.软件说明新增qspi_remote_update.h新增qspips...._zynq lwip
随便推点
ubuntu16.04成功安装 百度网盘 by deepin-wine-for-ubuntu_ubuntu kylin16.04 网盘-程序员宅基地
文章浏览阅读9.6k次,点赞2次,收藏6次。ubuntu笔记本 安装百度网盘 ,帮助完成安装 百度网盘 的资料来源,请点击此处hairui@hadoop:~$ git clone https://gitee.com/wszqkzqk/deepin-wine-for-ubuntu.git正克隆到 'deepin-wine-for-ubuntu'...remote: Enumerating objects: 2777, done.remo..._ubuntu kylin16.04 网盘
怎样处理过拟合和欠拟合?_拟合程度 高-程序员宅基地
文章浏览阅读981次。过拟合和欠拟合从模型在不同集合上的表现来看首先来明确一下过拟合和欠拟合的概念。过拟合(下图中最右侧的图像)过拟合指的是训练数据拟合程度过高的情况,也就是说模型在训练集上表现的很好,但是在测试集和新的数据集上表现的较差。欠拟合(下图中最左侧的图像)了解了什么是过拟合,欠拟合也显而易见,当模型在训练集和测试集表现的都不好的时候我们就称这种现象为欠拟合。从方差和偏差的角度来看..._拟合程度 高
Android 进阶解密读书笔记(十四)——插件化原理_android so的插件化-程序员宅基地
文章浏览阅读360次。插件化的客户端由宿主和插件两部分组成,宿主就是指先被安装到手机中的apk,就是我们平常加载的普通apk。插件一般是指经过处理的apk、so和dex等文件,插件可以被宿主进行动态安装。常用的插件化框架 DynamicApk、DroidPlugin、RePlugin。_android so的插件化
jdk1.7和jdk1.8区别-程序员宅基地
文章浏览阅读66次。在jdk7的新特性方面主要有一下几方面的增强本文是我学习了解了jdk7和jdk8的一些新特性的一些资料,有兴趣的大家可以浏览下下面的内容。官方文档在jdk7的新特性方面主要有下面几方面的增强:jdk1.7语法上1.1 二进制变量的表示,支持将整数类型用二进制来表示,以0b开头。所有整数int、short、long、byte都可以用二进制表示// An 8-bit 'byte' v..._jdk 1.8和jdk7
苹果cms在线采集,100多个采集资源接口,可定时采集_cms官方地址影视采集接口-程序员宅基地
文章浏览阅读1.1w次。这是一款苹果v10的采集插件,还可以采集海报,批量搜索,在此分享这个插件下载地址:【蓝奏云】:https://wwa.lanzous.com/iEZBji5xc8b【百度网盘】:https://pan.baidu.com/s/1HGy0kF_A9QS1JLQ-EvH9tg密码:u16j..._cms官方地址影视采集接口
image_transport Documentation_image_transport::camerapublisher-程序员宅基地
文章浏览阅读256次。http://docs.ros.org/api/image_transport/html/Code APIWhen transporting images, you should use image_transport’s classes as drop-in replacements for ros::Publisher and ros::Subscriber.image_transpor..._image_transport::camerapublisher