我用鸿蒙开发一台“萌萌”机器人_鸿蒙系统在机器人中的应用-程序员宅基地
我用鸿蒙开发一台机器人【萌萌的那种】
目录
0. 说明
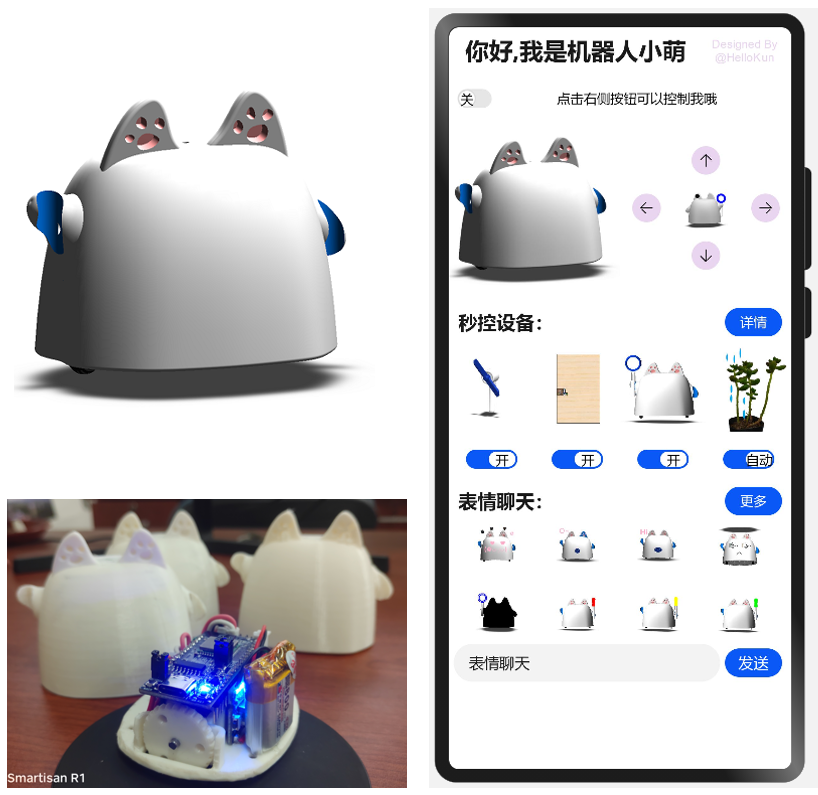
大家好我是HelloKun,正式接触鸿蒙也快9个月了,一直想做一个有意思的极客项目:既能用到鸿蒙特性【ArkUI、原子化服务、碰一碰等】、涉及南北向开发,又能融入实际生活。断断续续,从南到北,粗略过了一遍,终于,近期实现了这一想法。今天终于有空编写帖子,向大家展示个人极客项目–智慧终端机器人MRobot,如下图:


1. 方案设计
1.1 功能需求分析
::: hljs-center
MRobot = 快捷启动 + 自由移动 + APP交互 + 多设备互联 + 云端控制 + 其他拓展(语音、趣味功能)

:::
- 快捷启动:碰一碰拉起配网页面 | 在“我的服务”中使用卡片启动APP | 桌面卡片 ;
- 自由移动:具备转向、前进、后退等基本运动能力;
- APP交互: 控制机器人移动;
- 多设备互联:通过机器人控制其他设备,如门锁、台灯、风扇、浇水机等;
- 云端控制:基于mqtt协议控制互联设备,无需与机器人配网即可控制,一是解决机器人不在身边的情形(如归家开门),二是提供web端供其他人使用(如舍友手机不是HarmonyOS系统);
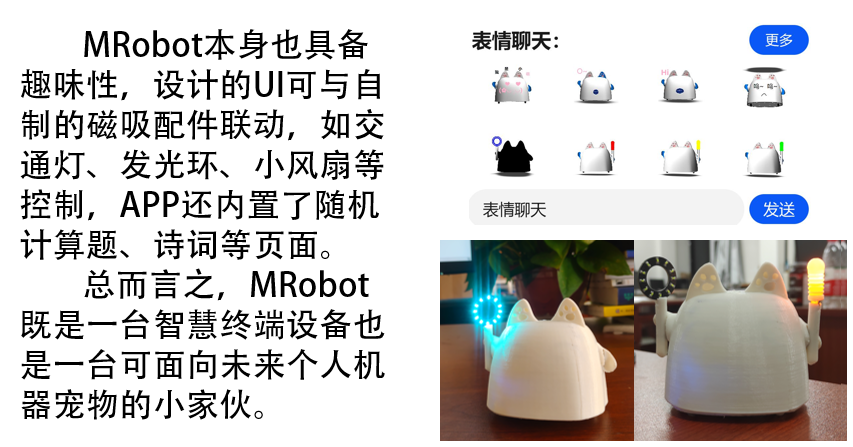
- 其他拓展:离线语音交互,对机器人喊话就能控制一切; 可控磁吸配件(给小朋友准备的。),如发光环、交通灯、迷你风扇
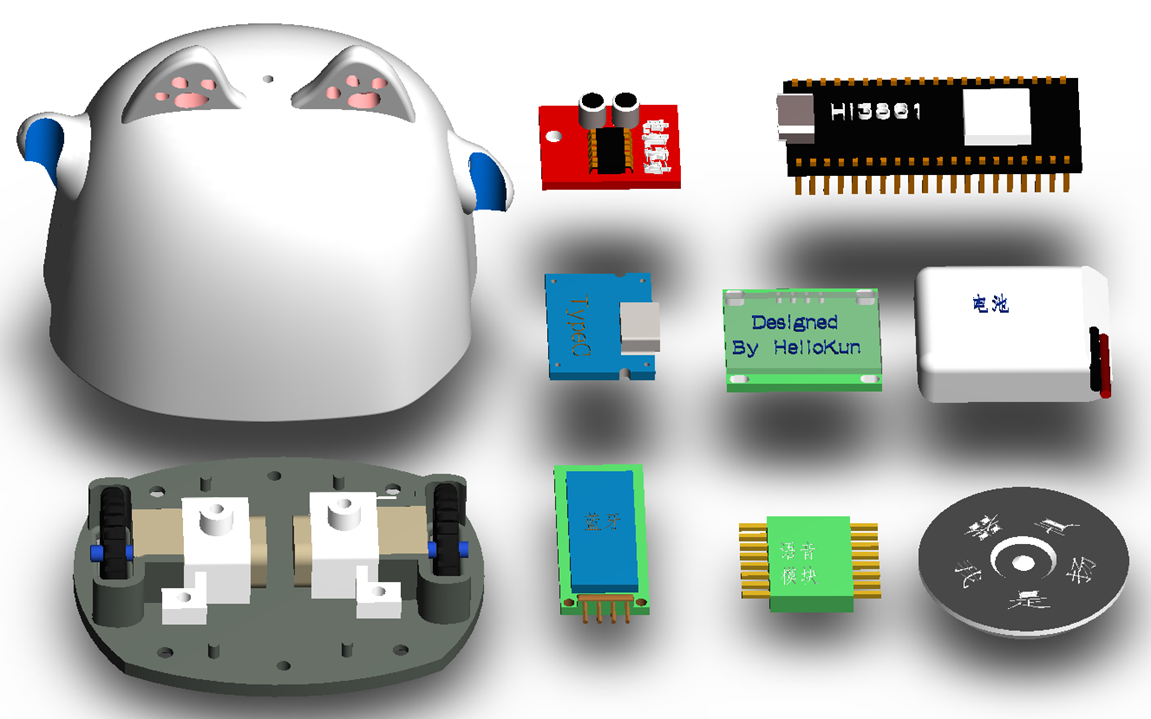
1.2 结构设计与硬件选型
参考猫、飞船返回舱等元素,花一天设计出了MRobot,萌不萌仁者见仁啦。硬件选型方面,机器人控制核心毫无疑问hi3861模组;N20小功率电机以及驱动;语音模块使用SU03T;一块800mAh锂电池以及TypeC充放管理模块;蓝牙用于与互联设备通信;几块磁铁预备做配件;左耳有触摸传感,提供oled显示模块或MPU6050选择(不同时使用)。
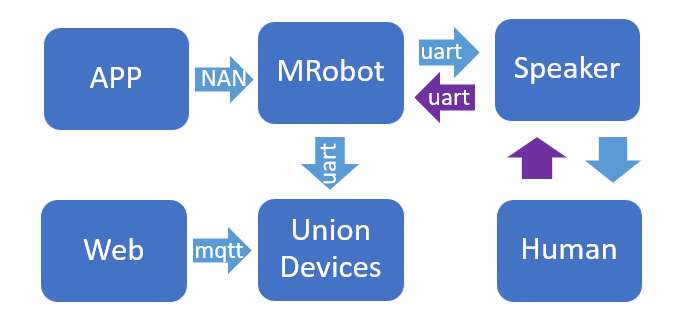
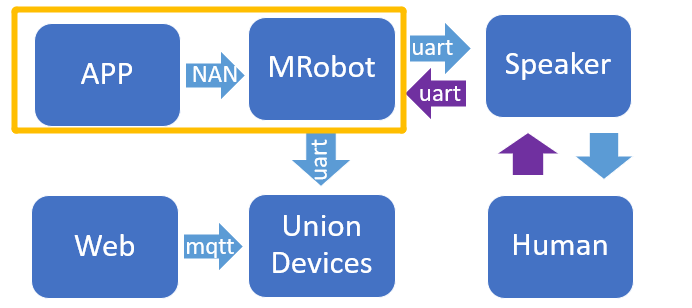
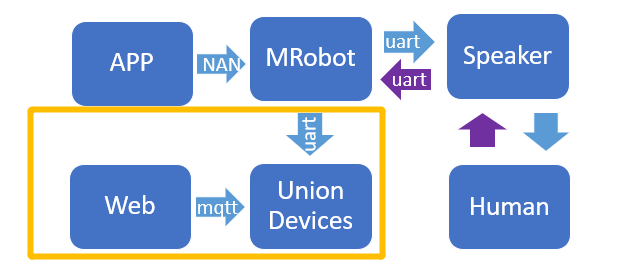
1.3 控制数据流
- APP:北向APP
- Web: 云端iot服务
- MRobot:智慧终端机器人 小萌
- Union Devices:互联设备,门锁台灯等
- Speaker:语音模块
- Human: 万恶之源
2. 北向App开发
APP基于ArkUI的类web开发范式,大部分使用JS开发。APP将完成各功能页面展示、消息下发功能。整个工程主要参考HarmonyOS Connect设备开发实现,去除掉模板JAVA实现板块,使用JS接口替代。
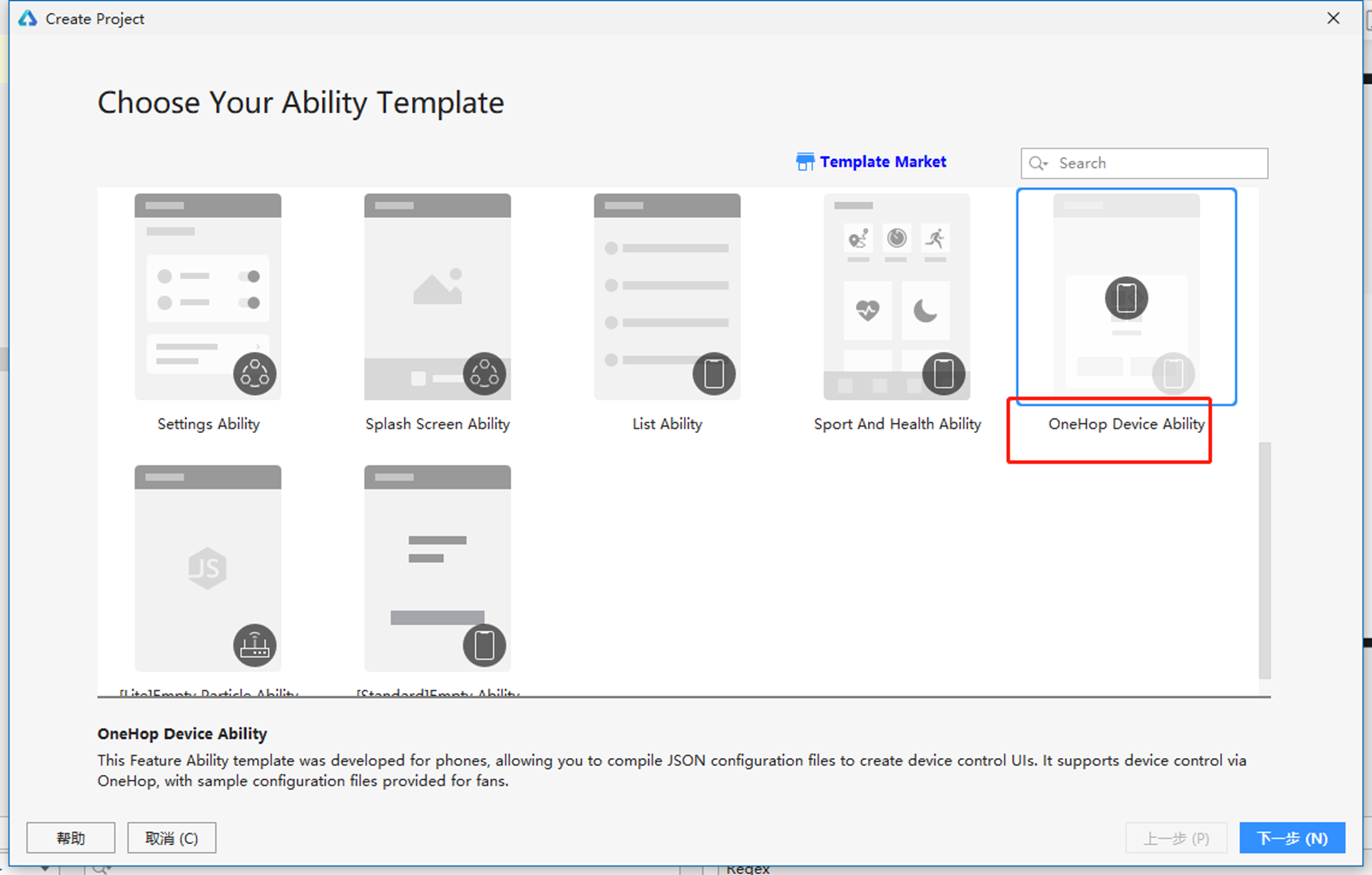
2.1 新建原子化服务APP
使用OneHop模板新建原子化服务工程,命名MRobot。可参考分享贴碰一碰分享总贴
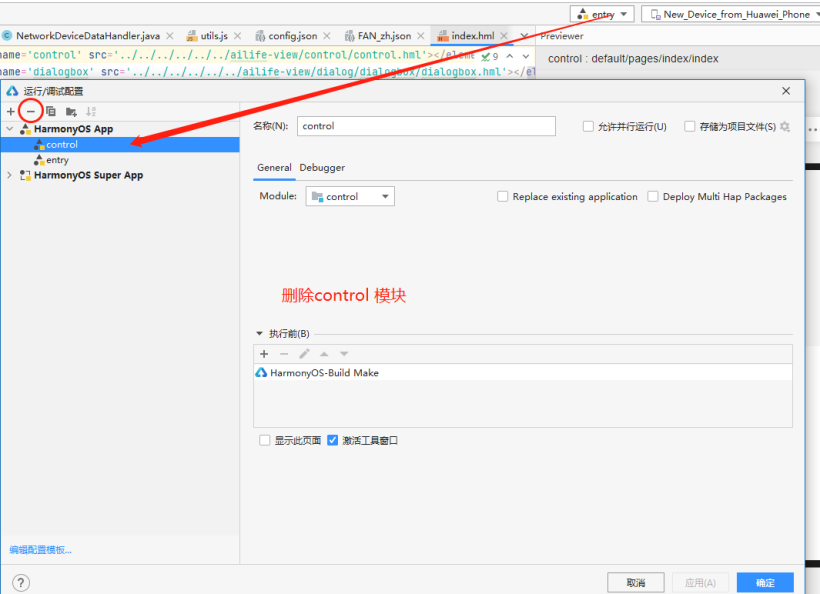
删除不需要的control模块(基于JAVA),新建一个jscontrol page,这是将是控制主页。参考1.抛除束缚,自定义设备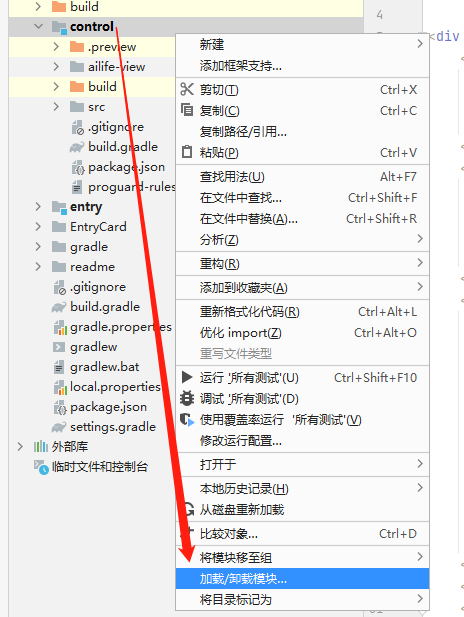
2.2 UI设计
根据需求分析设计UI,因为第一次写APP,渲染样式没有概念,所以在图片上做文章,对设计的MRobot模型进行渲染后导出图片置于APP中,所有的UI主要用到button、switch、swiper组件,先基于可视化低代码开发,后转为hml(jsctronl page是)。ui总览如下;

- 碰一碰拉起,进入配网页面,提供两个选项,一是正常配网,二是直接进入云端web页面秒控设备。
- 首页作为主控页面(jscontrol page),从上往下依次是:MRobot机器人运动控制、秒控设备(发送消息给机器人,实现互联设备控制)、表情聊天(点击表情发送消息给机器人,机器人做出运动、语音反应);
- 点击更多,将会打开一些隐藏页面,如随机计算、认识宇宙等,主要是面对小朋友,未来增加通关解锁相应技能。
下面总结常用的一些UI能力,方便调试与开发:
//弹窗
import prompt from '@system.prompt';
{
prompt.showToast({
message: "Hello Kun",
duration: 1000, });
//页面路由 push back replace
import router from '@system.router';
router.push({
uri: 'pages/netconfig/netconfig'
});
// switch 状态检测
switchChange(e){
console.log(e.checked);
if( e.checked){
prompt.showToast({
message: "连接"
});
}
else{
this.talk_msg = "reset MRobot";
prompt.showToast({
message: "断开"
});
};
}
2.3 NAN-JS通信
在新建的jsctronl 中需要调用JS通信接口在建立的NAN通道中发送数据,详细参考:2.拥抱JS通信接口,因为是调用JS接口,获取NAN通道deviceInfo十分容易。
例如,发送机器人前进核心代码如下:
import {
getApp} from '../../common.js';
//运动控制
Forward(){
this.front_img='/common/images/up0.png';
this.work_status ="萌萌退下";
this.talk_msg = "F";
this.sendMessage();
},
//发送消息
sendMessage(){
var ret =1;
var message = this.talk_msg;
let commonInfo = {
sessionId: getApp(this).ConfigParams.deviceInfo.sessionId
};
getApp(this).NetConfig.sendMessage(commonInfo, message, (result)=>{
if(result.code==0)
{
prompt.showToast({
message: "发送成功",
duration: 1000,
});
ret =0;}
else
{
prompt.showToast({
message: "发送失败",
duration: 1000,
});
ret= -1;};
});
if(ret==0)
{
return 0;
}
else return -1;
},
在南向开发中对消息进行匹配即可进行相应动作。
2.4 真机测试
APP真机调试算基本技能了,为什么我要单独拿出来呢,因为我入门北向时,遇到一个坑。装双系统的深有体会,Windows时间会慢,于是我给直接调到了UTC+14:00 圣诞岛,现在我已经在过520了(doge);
那么问题来了:AGC平台签名会校验时间,时间不对签名会失败,所以一直用另一台电脑做应用开发,折腾好久才发现自己笔记本时间不对导致签名失败。。。 事实证明,有些问题,坚持下去总会解决的。
::: hljs-center
:::
3. 南向开发
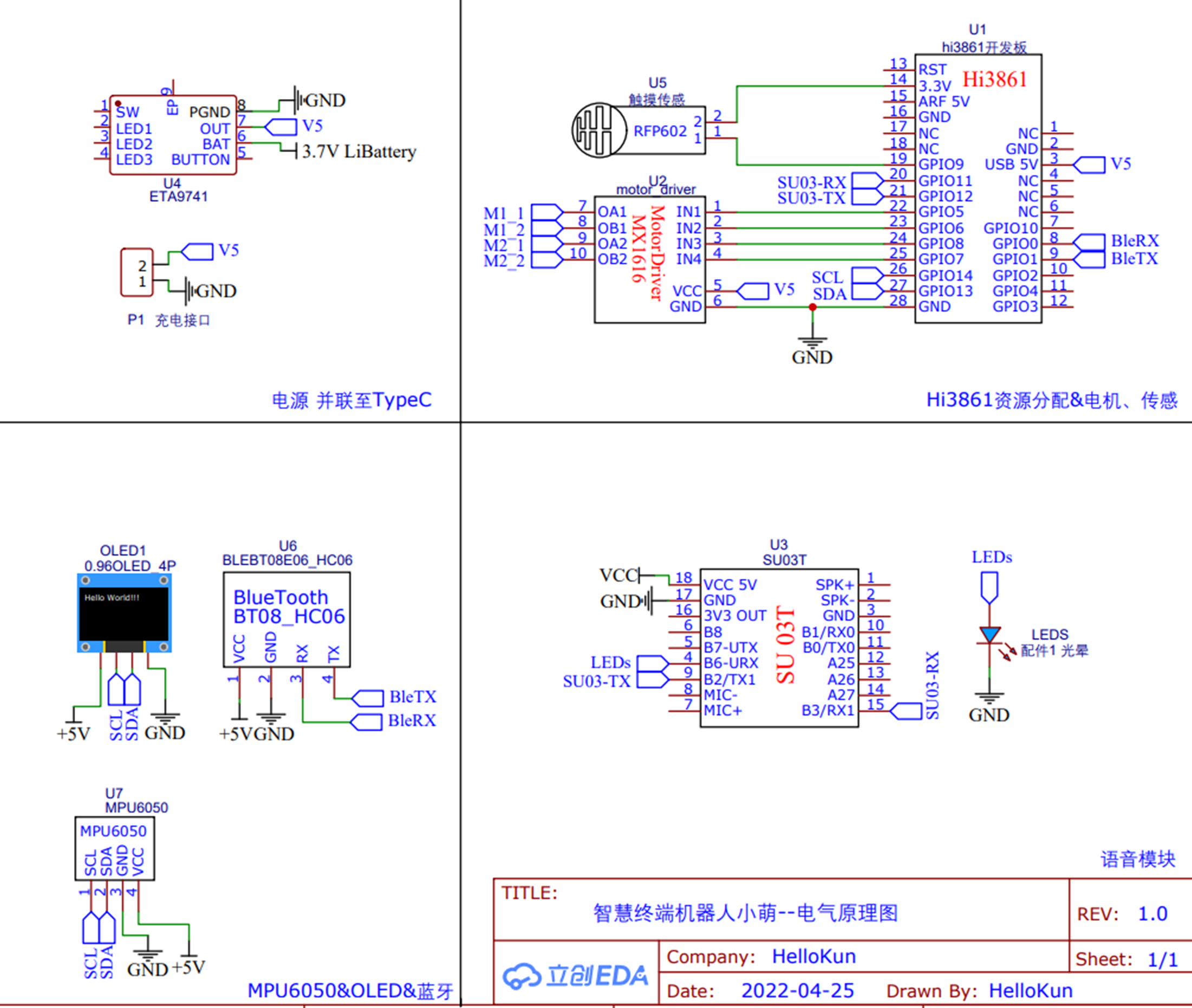
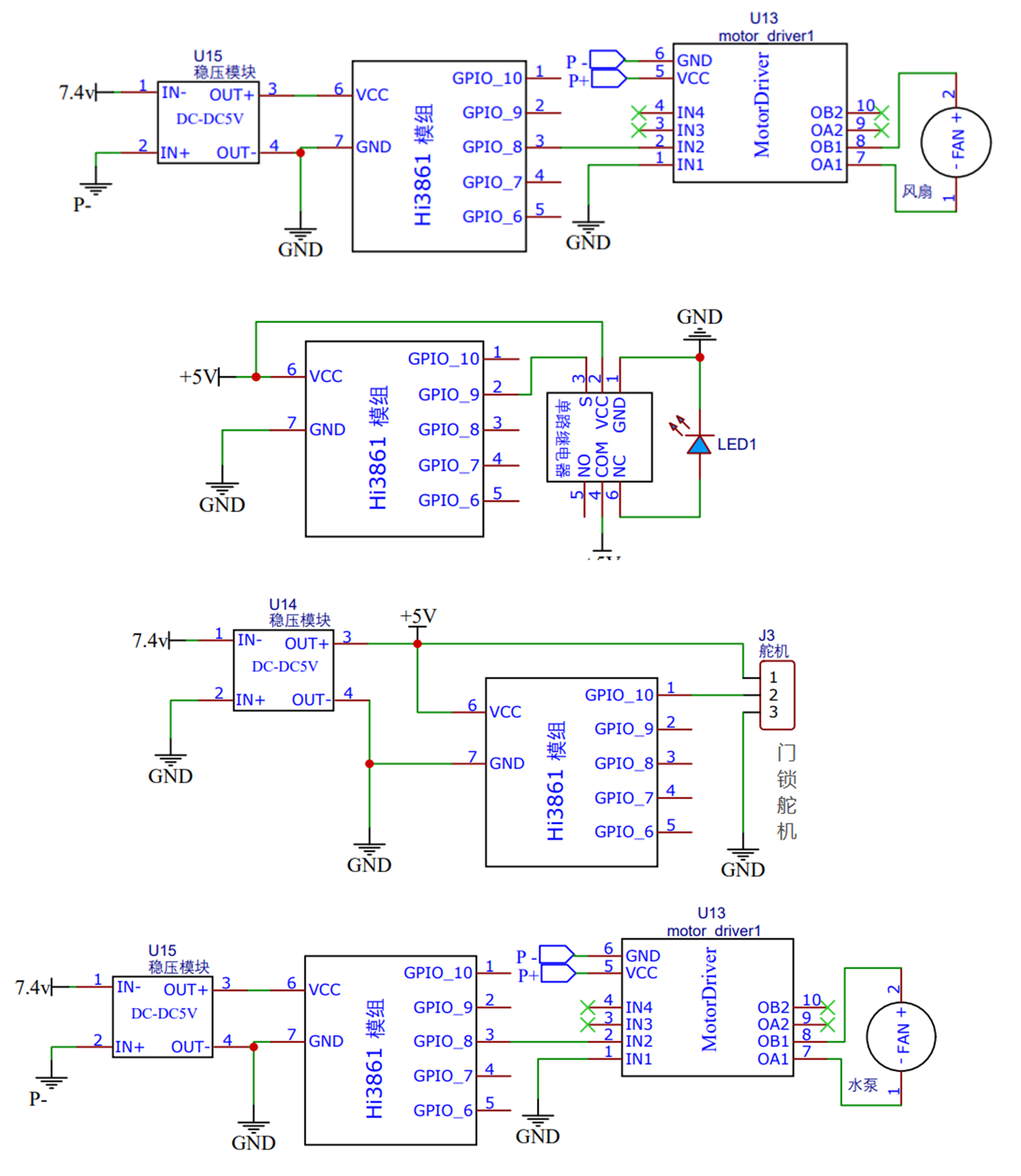
南向完成MRobot开发、互联设备开发。基于OpenHarmony 1.0.1 LTS对 hi3861 进行资源分配、各模块调试、整机调试、功能验证。
南向难免要面向硬件,MRobot与互联设备电气原理图如下:

3.1 获取OpenHarmony源码
以下是我获取源码的操作以及过程遇到的问题以及解决方法。
/***************** openharmony 1.0.1源码 ******************/
repo下载【安装git、repo】,#特别注意:请下载OpenHarmony 1.0.1 版本,后续会更新支持OpenHarmony其他版本
mkdir ~/OpenHarmony1.01
cd ~/OpenHarmony1.01
repo init -u [email protected]:openharmony/manifest.git -b OpenHarmony_1.0.1_release --no-repo-verify
repo sync -c
repo forall -c 'git lfs pull'
来自 <https://gitee.com/openharmony-sig/knowledge_demo_smart_home/tree/master/dev/docs/smart_cleaner>
或者https://repo.huaweicloud.com/harmonyos/os/ 下载解压
/********** 编译1.0.1源码时,遇到问题以及解决方法: ******************* /
-使用hb 、python build.py 指令编译
(1) hb -h执行之后遇到 please run in source root,因为1.0.1的ohos-build是0.2.1 , 与3.0的不通用,
【解决方法】卸载掉 pip uninstall ohos-build
再在1.0源码根目录安装hb 执行 pip install build/lite
(2)在源码处可以hb set,但hb build -f编译时遇到 clang not install
【解决方法】 ~/.bashrc中添加python环境变量即可
-使用DevEcoTools编译
(1)找不到gn、ninja
【解决方法】所有解压的工具链,如gcc、ninja、gn等,需要在 ~/.bashrc中添加环境变量,示例 export -----
(2)找不到clang
【解决方法】 ~/.bashrc中添加python、gcc、ninja、gn等环境变量即可
顺便提一下,我并没有使用ubuntu环境进行设备开发,因为我发现 DevEco Tools Beta3.1 可以直接编译1.0.1源码。大家可以尝试下windows一站式开发。源码需要修改,配置build选项开启I2C、UART等(MRobot使用了两个串口)。具体操作可参考:0.1.2。
3.2 MRobot碰一碰配网交互
结合winder demo很快就能找出配网接口,配网之后即可接收数据进行设备控制。整体控制流程如下:
::: hljs-center
:::
核心代码如下(详情可参考:3.南向开发-设备配网):
include:
│ ├── netcfg.h // 无感配网注册相关接口
│ ├── network_config_service.h //无感配网相关头文件。
libs:
├── libs
│ ├── libhilinkadapter_3861.a // 无感配网相关库文件。
│ └── libnetcfgdevicesdk.a // 无感配网相关库文件。
src:
├── netcfg.c // NAN相关操作和联网动作
//注册回调
static void *MRobotTask(const char *arg)
{
(void)arg;
····
NetCfgRegister(MRobotNetEventHandler); // 进入配网状态并注册网络监听事件
····
}
//回调任务
static int MRobotNetEventHandler(NET_EVENT_TYPE event, void *data)
{
switch (event)
{
case NET_EVENT_CONNECTTED: // 网络连接成功
m_netstatus = true;
printf("m_netstatus:%d\n\n", m_netstatus); // 显示网络已连接
break;
case NET_EVENT_RECV_DATA: // 接收到网络信息(FA发送的消息)
MRobotProcessAppMessage((const char *)data, strlen(data)); // 处理对应的信息
break;
default:
break;
}
return 0;
}
//接收数据
static void MRobotProcessAppMessage(const char *data, int data_len)
{
if (data_len != MESSAGE_LEN)
{
strcpy(app_msg, data);
// app_msg=data;
printf("------app_msg:%s \r\n", app_msg);
printf("----- data:%s\r\n", data);
WINERR("data len invalid! \n");
return;
}
}
//消息处理
// app运动控制
static void AppCtrMRobot()
{
switch (*app_msg)
{
case 'F':
{
printf("退下\r\n");
// OledFillScreen(0x00);
// OledShowString(25, 2, "Forward", 2);
Backward(circle_time);
Stop_motor();
return; //每次仅有一种情况,满足直接return回main
}
···
}
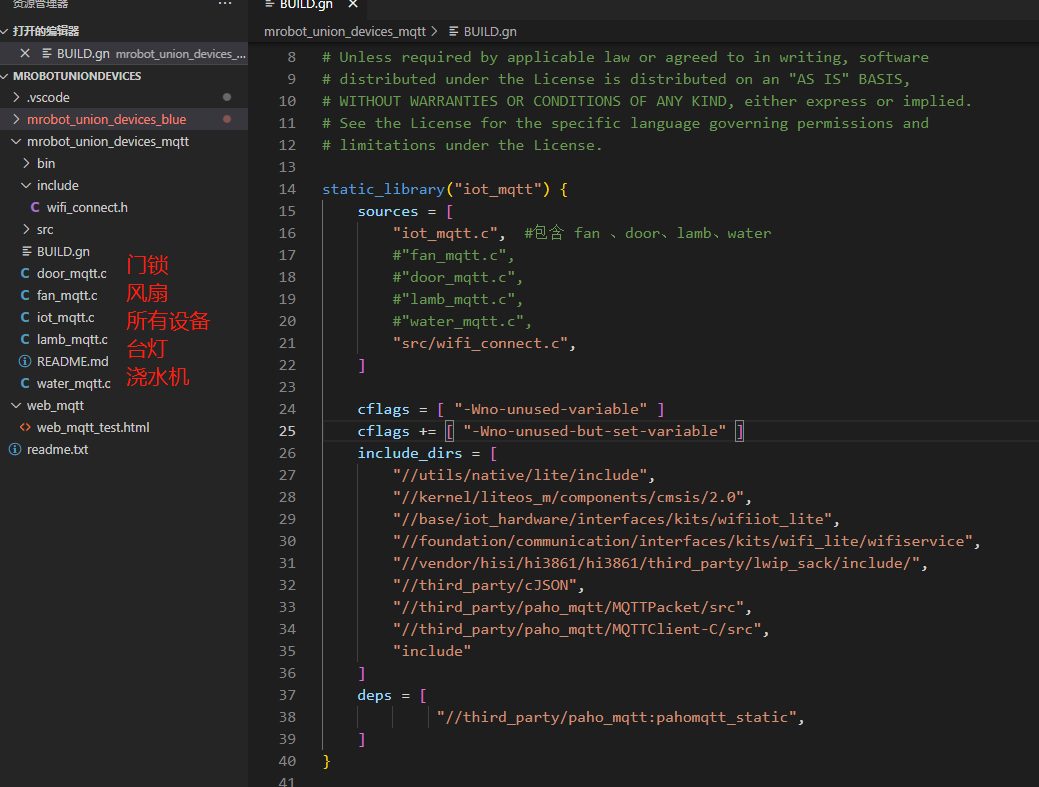
3.3 互联设备开发
互联设备包括门锁、风扇、台灯、浇水机均使用hi3861模组作为核心板,若有更多设备可以快捷添加。每台设备支持使用蓝牙串口控制、基于mqtt的云端控制。增加web端选择也让非HarmonyOS移动设备控制互联设备,让更多的人享受便利。
下面以门锁为例,给出开发方案:
/**
*
* V2 版本 所有union设备都融合在一起,共用一套代码
* 缺点是浪费时间作其他设备的事;
* 也提供了各设备单独的版本 对应fan_mqtt.c door_mqtt.c lamb_mqtt.c water_mqtt.c 编译记得修改 BUILD.gn
* */
#include <stdio.h>
#include <string.h>
#include <stdlib.h>
#include <unistd.h>
#include "ohos_init.h"
#include "cmsis_os2.h"
#include "wifi_connect.h"
#include "MQTTClient.h"
#include "wifiiot_errno.h"
#include "wifiiot_gpio.h"
#include "wifiiot_gpio_ex.h"
#include "wifiiot_adc.h"
#include "wifiiot_uart.h"
#include "wifiiot_pwm.h"
#include "hi_uart.h"
#define UART_BUFF_SIZE 1000
#define MQTT_BUFF_SIZE 1000
static const char *data = "MRobot_door\r\n";
uint8_t uart_buff[UART_BUFF_SIZE] = {0};
uint8_t *uart_buff_ptr = uart_buff;
char mqtt_buff[MQTT_BUFF_SIZE] = {0};
static unsigned char sendBuf[1000];
static unsigned char readBuf[1000];
Network network;
void messageArrived(MessageData *data)
{
printf("Message arrived on topic %.*s: %.*s\n", data->topicName->lenstring.len, data->topicName->lenstring.data,
data->message->payloadlen, data->message->payload);
strcpy(mqtt_buff,data->message->payload);
printf("mqtt_buff%s \n",mqtt_buff);
}
/************* MRobotUnionDevices Control ******************/
// GPIO 接口与原理图对应 使用哪个就在主函数加入Init、 Ctr函数。
static void MyUartInit(void)
{
uint32_t ret;
WifiIotUartAttribute uart_attr = {
.baudRate = 115200,
// data_bits: 8bits
.dataBits = 8,
.stopBits = 1,
.parity = 0,
};
// Initialize uart driver
ret = UartInit(WIFI_IOT_UART_IDX_1, &uart_attr, NULL);
if (ret != WIFI_IOT_SUCCESS)
{
printf("Failed to init uart! Err code = %d\n", ret);
return;
}
}
/*****************Door*************************/
static void DoorInit(void)
{
//初始化GPIO
GpioInit();
IoSetFunc(WIFI_IOT_IO_NAME_GPIO_10, WIFI_IOT_IO_FUNC_GPIO_10_GPIO);
GpioSetDir(WIFI_IOT_GPIO_IDX_10, WIFI_IOT_GPIO_DIR_OUT);
GpioSetOutputVal(WIFI_IOT_GPIO_IDX_10, 1);
}
/* @brief Servo control *
@param angle input value: 0-200 *
*/
void My_servo(int angle)
{
int j = 0;
int k = 20000 / 200; //实际应该是20000/180
angle = k * angle;
for (j = 0; j < 5; j++)
{
GpioSetOutputVal(WIFI_IOT_GPIO_IDX_10, 1);
//hi_udelay(angle); // angle ms
usleep(angle);
GpioSetOutputVal(WIFI_IOT_GPIO_IDX_10, 0);
usleep(20000-angle);
} // 20ms 控制舵机
}
static void DoorCtr(void)
{
//UartRead(WIFI_IOT_UART_IDX_1, uart_buff_ptr, UART_BUFF_SIZE);
hi_uart_read_timeout(WIFI_IOT_UART_IDX_1, uart_buff_ptr, UART_BUFF_SIZE,10);
printf("Uart1 read door data:%s \n", uart_buff_ptr);
if (uart_buff[0] == '2' && uart_buff[1] == '1')
{
//模拟20ms周期 PWM 控制舵机开门
printf("******* 开 门 *****\n");
My_servo(100); //开门
uart_buff[0] ='5';
}
if (mqtt_buff[0] == '2' && mqtt_buff[1] == '1')
{
//模拟20ms周期 PWM 控制舵机开门
printf("******* 开 门 *****\n");
My_servo(100); //开门
mqtt_buff[0] ='5';
}
My_servo(180); //自动复位 模拟舵机有点迷。值是测试出来的,上面的延时<0 居然可以实现舵机控制
printf("******* 门 机 械 复 位 *****\n");
}
static void MQTT_DoorTask(void)
{
WifiConnect("r1", "88888889");
printf("Starting ...\n");
int rc, count = 0;
MQTTClient client;
NetworkInit(&network);
printf("NetworkConnect ...\n");
MyUartInit();
DoorInit();
begin:
NetworkConnect(&network, "我的服务器地址iot页面", 1883); // hellokun
printf("MQTTClientInit ...\n");
MQTTClientInit(&client, &network, 2000, sendBuf, sizeof(sendBuf), readBuf, sizeof(readBuf));
MQTTString clientId = MQTTString_initializer;
clientId.cstring = "MRobot";
MQTTPacket_connectData data = MQTTPacket_connectData_initializer;
data.clientID = clientId;
data.willFlag = 0;
data.MQTTVersion = 3;
data.keepAliveInterval = 0;
data.cleansession = 1;
printf("MQTTConnect ...\n");
rc = MQTTConnect(&client, &data);
if (rc != 0)
{
printf("MQTTConnect: %d\n", rc);
NetworkDisconnect(&network);
MQTTDisconnect(&client);
osDelay(200);
goto begin;
}
printf("MQTTSubscribe ...\n");
//其他设备 web_fan_btn web_lamb_btn web_water_btn
rc = MQTTSubscribe(&client, "web_door_btn", 2, messageArrived); //回调
if (rc != 0)
{
printf("MQTTSubscribe: %d\n", rc);
osDelay(200);
goto begin;
}
while (++count)
{
//使用哪个设备就在加入对应Init、 Ctr。
DoorCtr(); //串口、mqtt数据控制门
MQTTMessage message;
char payload[30];
message.qos = 2;
message.retained = 0;
message.payload = payload;
sprintf(payload, "message number %d", count);
message.payloadlen = strlen(payload);
//其他设备 发布fan lamb water
if ((rc = MQTTPublish(&client, "door", &message)) != 0)
{
printf("Return code from MQTT publish is %d\n", rc);
NetworkDisconnect(&network);
MQTTDisconnect(&client);
goto begin;
}
osDelay(50);
printf("----- count = %d ------\r\n",count);
}
//无需发布
// while (++count)
// {
// MQTTMessage message;
// char payload[30];
// message.qos = 2;
// message.retained = 0;
// message.payload = payload;
// sprintf(payload, "message number %d", count);
// message.payloadlen = strlen(payload);
// //其他设备 发布fan lamb water
// if ((rc = MQTTPublish(&client, "door", &message)) != 0){
// printf("Return code from MQTT publish is %d\n", rc);
// NetworkDisconnect(&network);
// MQTTDisconnect(&client);
// goto begin;
// }
// osDelay(50);
// }
}
static void MQTT_Door(void)
{
osThreadAttr_t attr;
attr.name = "MQTT_DoorTask";
attr.attr_bits = 0U;
attr.cb_mem = NULL;
attr.cb_size = 0U;
attr.stack_mem = NULL;
attr.stack_size = 10240;
attr.priority = osPriorityNormal;
if (osThreadNew((osThreadFunc_t)MQTT_DoorTask, NULL, &attr) == NULL)
{
printf("[MQTT_Door] Falied to create MQTT_DoorTask!\n");
}
}
APP_FEATURE_INIT(MQTT_Door);
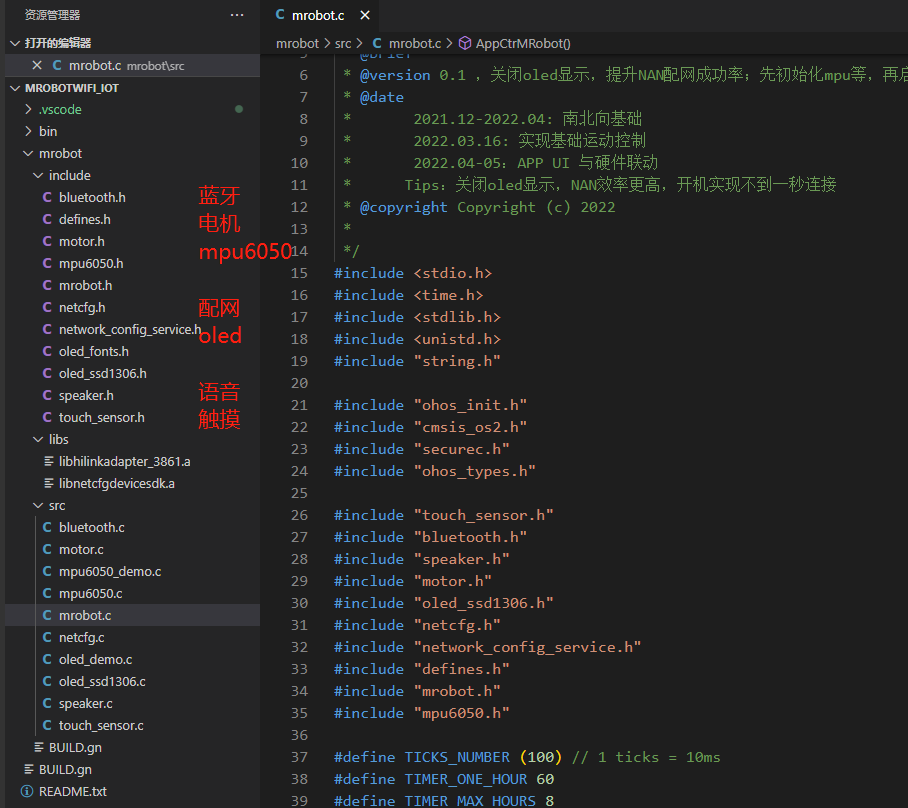
3.4 南向开发框架总结
MRobot文件框架:
互联设备文件框架:
3.5 趣味配件
给小朋友准备的,大朋友跳过吧。
4. 机器人 demo
个人总结
没什么好说的,很多不会,继续坚持,深挖、死磕。
520,恰好生日,给个免费的赞吧! (biu~)
智能推荐
第一章-第七题( 有人认为,“中文编程”, 是解决中国程序员编程效率一个秘密武器,请问它是一个 “银弹” 么? )--By 侯伟婷...-程序员宅基地
文章浏览阅读208次。 首先,“银弹”在百度百科中的解释是银色的子弹,我们更熟知的“银弹”一词,应该是在《人月神话》中提到的。银弹原本应该是指某种策略、技术或者技巧可以极大地提高程序员的生产力【1】。此题目中关于中文编程是否是一个“银弹”的讨论,我所持的是否定的态度,我不认为中文编程会是一项提高中国程序员编程效率的一个秘密武器,相反,我还认为他会比现在的英文编程来说降低工作效率,造成很大的工作上的困难。..._存在一种策略,技术技巧可以极大的提高程序员的生产力。
模拟用户操作 京东抢购 华为mate40 Pro、支付的js脚本_京东抢华为脚本-程序员宅基地
文章浏览阅读5.4k次,点赞2次,收藏29次。1 登录 https://item.jd.com/10024680695127.html2 打开开发者模式,插入如下代码,count=1nIntervId=0 stop=0 var goDate function start(){ if (stop==1){ clearInterval(nIntervId);//停止监控 return } if (Date.now() < goDate){ return _京东抢华为脚本
php eayswoole node axios crypto-js 实现大文件分片上传复盘_cryptojs 处理文件过大-程序员宅基地
文章浏览阅读740次。1)前端侧 :前端上传文件,根据分片大小,自动计算出整个文件的分片数量,以及分片二进制文件,以及整个文件的md5值,以及分片文件md5值,传与后端,后端处理完后,根据上传分片的进度以及后端返回状态,判断整个文件是否传输完毕,完毕后,前端展示完成进度。2)后端PHP侧:后端接收前端传过来的数据,包括文件名,文件md5,分片信息,然后将分片文件信息存储到redis 有序集合中,其中key为整个文件的md5 ,待所有分片文件都上传完后,根据顺序,然后将文件整合存储,然后完成整个文件分片上传逻辑。_cryptojs 处理文件过大
VScode 编译器配置IDE环境(C/C++/Go)_vscode 配置 在ide上编译运行-程序员宅基地
文章浏览阅读4.5k次,点赞4次,收藏29次。VScode 编译器配置IDE环境(C/C++/Go)摘要VS Code 下载安装下载安装简单使用WindowsLinuxIDE 环境配置C/C++C/C++ 编译器安装及配置简单使用 VS Code 终端进行编译和运行方式使用code runner插件:Go总结摘要对于 VS Code 的使用,我本人感觉这个编译器还是很好用的,而且目前能够支持在 Windows、Linux、MacOs 上流畅运行,并且官方已经提供了 X86、ARM等主流架构版本,还很容易通过安装插件就能过实现基于 SSH 的远程代_vscode 配置 在ide上编译运行
oracle use_ntl详细解释_oracle中use_nl提示-程序员宅基地
文章浏览阅读1k次。1./*+ use_nl(t2,t) */提示走nest Loop,但是没有提示t2还是t为驱动表2./*+ ordered user_nl(t2,t) */提示走 Nest Loop,order提示的是from 后面的第一个表为驱动表.3./*+ leading(t2) use_nl(t) */直接提示t2为驱动表。结论:use_NL不能让优化器确定谁是驱动表谁是被驱动表。use_nl(t,t2)也没有指出哪个是驱动表,这时候我们就需要使用Ordered ,_oracle中use_nl提示
windows下python2.7 media模块的安装_python下载media模块-程序员宅基地
文章浏览阅读1.2k次。总共就是需要以上这些安装包(这里面python-2.7.4.msi是python的安装包)关于pygraphics的模块可以到http://code.google.com/p/pygraphics/downloads/list下载,下载时要看好针对的操作系统和python的版本号。找不到的就百度吧,最好是到官网上下载。安装步骤:下载:Python Ima_python下载media模块
随便推点
5、Nacos 、Sentinel、Seata下载与安装_sentinel下载安装-程序员宅基地
文章浏览阅读1.8k次,点赞2次,收藏10次。1、官网:https://nacos.io/zh-cn/index.html2、 下载3、解压安装双击startup.cmdjava.io.IOException: java.lang.IllegalArgumentException: db.num is null如果出现以上错误,需要指令启动:单机模式启动 window版本 startup.cmd -m standalone4、访问登录http://localhost:8848/nacos/index.html#/._sentinel下载安装
linux ssh远程登录退出,ssh登陆小技巧-用SSH 退出符切换 SSH 会话-程序员宅基地
文章浏览阅读1.7k次。用SSH 退出符切换 SSH 会话这个技巧非常实用。尤其是远程登陆到一台主机A,然后从A 登陆到B,如果希望在A 上做一些操作,还得再开一个终端,很是麻烦。当你使用ssh从本机登录到远程主机时,你可能希望切换到本地做一些操作,然后再重新回到远程主机。这个时候,你不需要中断 ssh连接,只需要按照如下步骤操作即可:当你已经登录到了远程主机时,你可能想要回到本地主机进行一些操作,然后又继续回到远程主机..._linux中ssh远程登录后如何回到原来主机
[渝粤教育] 四川农业大学 计算机网络 参考 资料_调制的信号是单一频率的载波信号吗-程序员宅基地
文章浏览阅读796次。教育-计算机网络-章节资料考试资料-四川农业大学【】随堂测验1、【单选题】以下哪一项不属于物联网的实现基础A、可穿戴设备B、RFIDC、APPD、蓝牙参考资料【 】2、【单选题】以下哪一项不是解决网络安全问题的因素A、 安全技术B、法律法规C、道德自律D、多种应用参考资料【 】电路交换随堂测验1、【单选题】以下哪一项不是电路交换的特征A、按需建立点对点信道B、数据无需携带地址信息C、点对点信道独占经过的物理链路带宽D、两两终端之间可以同时通信参考资料_调制的信号是单一频率的载波信号吗
吃透这几道MQ消息队列面试题,秒杀面试官..._mq面试题吊打面试官-程序员宅基地
文章浏览阅读450次。几种常见的MQ面试题相关视频参考(来自动力节点):https://www.bilibili.com/video/BV1Ap4y1D7tU相关资料下载:http://www.bjpowernode.com/?csdn为什么使用消息队列?其实就是问问你消息队列都有哪些使用场景,然后你项目里具体是什么场景,说说你在这个场景里用消息队列是什么?面试官问你这个问题,期望的一个回答是说,你们公司有个什么业务场景,这个业务场景有个什么技术挑战,如果不用 MQ 可能会很麻烦,但是你现在用了 MQ 之后带_mq面试题吊打面试官
《UnityAPI.Screen屏幕》(Yanlz+Unity+SteamVR+云技术+5G+AI+VR云游戏+Unity+Screen+dpi+SetResolution+立钻哥哥++OK++)_unity刷新屏幕的api-程序员宅基地
文章浏览阅读1.5k次。《UnityAPI.Screen屏幕》 Screen屏幕 版本 作者 参与者 完成日期 备注 UnityAPI_Screen_V01_1.0 严立钻 2020.09.16 ..._unity刷新屏幕的api
流媒体服务器SRS的搭建及QT下RTMP推流客户端的编写_开源srs流媒体服务器-程序员宅基地
文章浏览阅读2.4k次。本客户端基于我的博客:https://blog.csdn.net/linyibin_123/article/details/132107948 开发的播放器下新增RTMP推流。播放器可以支持软硬解码,截图、录像等功能,详细功能看该博客。本客户端支持读取文件解码后推流,也支持拉取网络流解码后进行推流。推流地址为前面搭建的RTMP流媒体服务器,推流成功后,通过VLC播放器从RTMP服务器上拉流下来播放。_开源srs流媒体服务器