创建机器人urdf模型并在rviz中展示(利用roboware studio)_5)创建机器人的urdf文件,在rviz中显示并移动机器人。 详细记录移动机器人模型设计-程序员宅基地
注:本文利用roboware studio工具建立urdf模型
创建机器人描述功能包
右键单击工作空间catkin_ws/src文件夹,点击新建ROS包,将功能包命名为mrobot_description,如下:
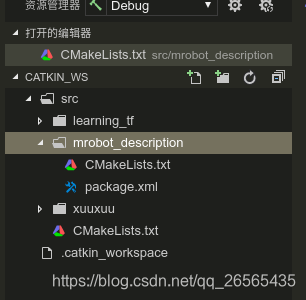
手动添加功能包依赖项,打开CMakeLists.txt文件,如图所示添加urdf、xacro

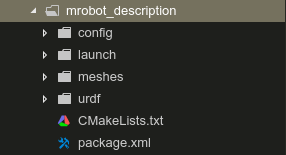
在功能包中新建四个文件夹,分别为
urdf:用于存放机器人模型的urdf或者xacro文件。
meshes:用于放置urdf中引用的模型渲染文件。
launch:用于保存相关启动文件。
config:用于保存rviz的配置文件。
创建机器人底盘描述文件mrobot_chassis.urdf
这个机器人底盘模型有7个link和6个joint。7个link包括1个机器人底板、2个电机、2个驱动轮和2个万向轮;6个joint负责将驱动轮、万向轮、电机安装在底板上,并设置相应的连接方式。
在mrobot_description/urdf文件夹下新建mrobot_chassis.urdf文件,如下:
<?xml version="1.0" ?>
<robot name="mrobot_chassis">
<link name="base_link">
<visual>
<origin xyz=" 0 0 0" rpy="0 0 0" />
<geometry>
<cylinder length="0.005" radius="0.13"/>
</geometry>
<material name="yellow">
<color rgba="1 0.4 0 1"/>
</material>
</visual>
</link>
<joint name="base_left_motor_joint" type="fixed">
<origin xyz="-0.055 0.075 0" rpy="0 0 0" />
<parent link="base_link"/>
<child link="left_motor" />
</joint>
<link name="left_motor">
<visual>
<origin xyz="0 0 0" rpy="1.5707 0 0" />
<geometry>
<cylinder radius="0.02" length = "0.08"/>
</geometry>
<material name="gray">
<color rgba="0.75 0.75 0.75 1"/>
</material>
</visual>
</link>
<joint name="left_wheel_joint" type="continuous">
<origin xyz="0 0.0485 0" rpy="0 0 0"/>
<parent link="left_motor"/>
<child link="left_wheel_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="left_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.5707 0 0" />
<geometry>
<cylinder radius="0.033" length = "0.017"/>
</geometry>
<material name="white">
<color rgba="1 1 1 0.9"/>
</material>
</visual>
</link>
<joint name="base_right_motor_joint" type="fixed">
<origin xyz="-0.055 -0.075 0" rpy="0 0 0" />
<parent link="base_link"/>
<child link="right_motor" />
</joint>
<link name="right_motor">
<visual>
<origin xyz="0 0 0" rpy="1.5707 0 0" />
<geometry>
<cylinder radius="0.02" length = "0.08" />
</geometry>
<material name="gray">
<color rgba="0.75 0.75 0.75 1"/>
</material>
</visual>
</link>
<joint name="right_wheel_joint" type="continuous">
<origin xyz="0 -0.0485 0" rpy="0 0 0"/>
<parent link="right_motor"/>
<child link="right_wheel_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="right_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.5707 0 0" />
<geometry>
<cylinder radius="0.033" length = "0.017"/>
</geometry>
<material name="white">
<color rgba="1 1 1 0.9"/>
</material>
</visual>
</link>
<joint name="front_caster_joint" type="fixed">
<origin xyz="0.1135 0 -0.0165" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="front_caster_link"/>
</joint>
<link name="front_caster_link">
<visual>
<origin xyz="0 0 0" rpy="1.5707 0 0"/>
<geometry>
<sphere radius="0.0165" />
</geometry>
<material name="black">
<color rgba="0 0 0 0.95"/>
</material>
</visual>
</link>
</robot>
在检查并解析新建的urdf文件之前,需要先对工作空间进行编译:
cd ~/catkin_ws
catkin_make
urdf提供了一些命令行工具,可以帮助我们检查、梳理模型文件,需要在终端进行独立安装,命令如下:
$ sudo apt-get install liburdfdom-tools
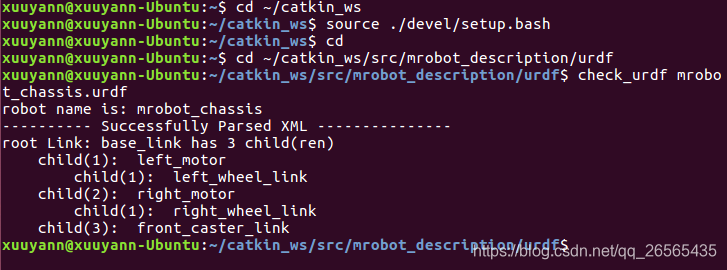
安装完成后,检查并解析上述新建的urdf文件的命令如下(注:在check_urdf命令之前,需要进入urdf所在文件夹):
cd ~/catkin_ws
source ./devel/setup.bash
cd
cd ~/catkin_ws/src/mrobot_description/urdf
check_urdf mrobot_chassis.urdf
若一切正常,会出现如下信息
建立launch命令文件
在mrobot_description/launch文件夹下新建display_mrobot_chassis_urdf.launch文件,如下:
<launch>
<param name="robot_description" textfile="$(find mrobot_description)/urdf/mrobot_chassis.urdf" />
<!-- 设置GUI参数,显示关节控制插件 -->
<param name="use_gui" value="true"/>
<!-- 运行joint_state_publisher节点,发布机器人的关节状态 -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" />
<!-- 运行robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher" />
<!-- 运行rviz可视化界面 -->
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find mrobot_description)/config/mrobot_urdf.rviz" required="true" />
</launch>

在rviz中显示机器人底盘模型
打开ros,编译一下mrobot_description功能包,然后设置环境变量,运行launch文件,命令如下:
roscore
cd ~/catkin_ws
catkin_make
source ./devel/setup.bash
roslaunch mrobot_description display_mrobot_chassis_urdf.launch
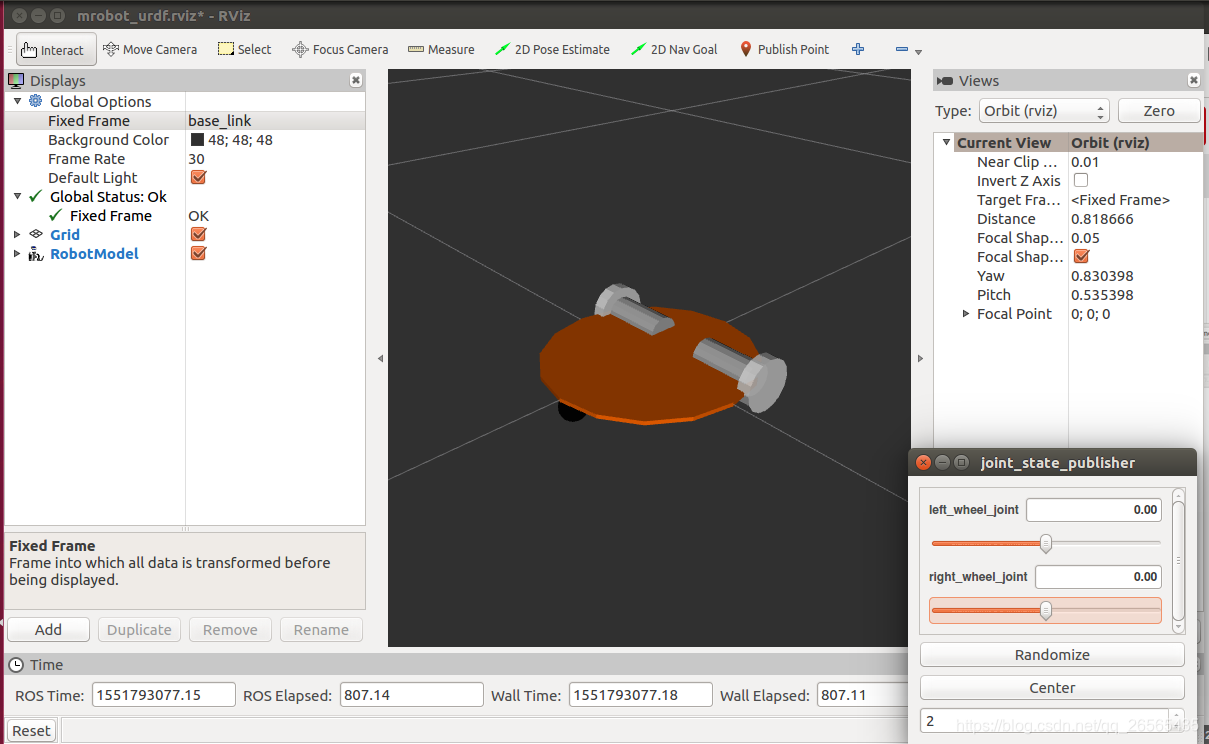
运行成功后,显示如下。这里不仅启动了rviz,还出现了一个叫joint_state_publisher的UI,这是因为我们在启动文件中启动了joint_state_publisher节点,该节点可以发布每个joint(除了fixed)的状态,拖动控制条可以改变轮子的运动状态。
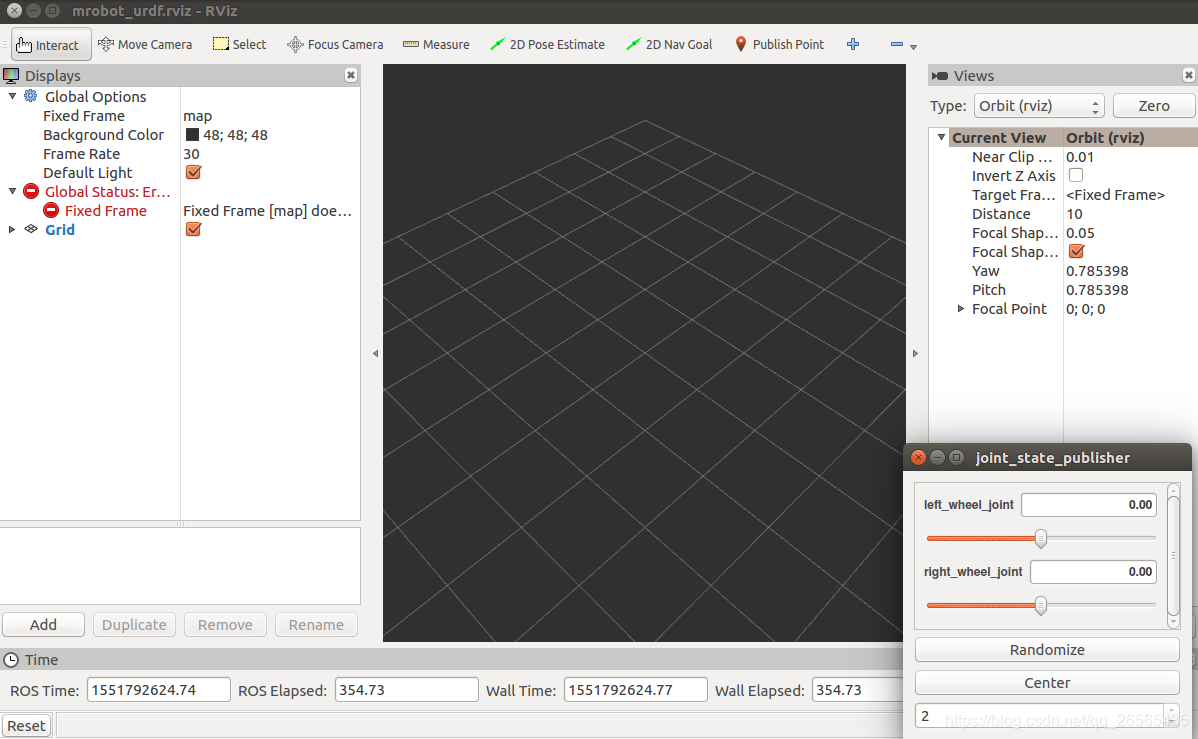
不过此时并没有出现模型,并且还有错误,修改如下:
在Global Options中的Fixed Frame下拉菜单中选择base_link,点击Add选项,添加RobotModel,如图

修改后如下
智能推荐
postgresql 中文排序_pg中文排序-程序员宅基地
文章浏览阅读3.2k次,点赞3次,收藏2次。pg 中文首字母排序_pg中文排序
[Mysql] CONVERT函数_mysql convert-程序员宅基地
文章浏览阅读3.1w次,点赞23次,收藏109次。本文主要讲解CONVERT函数_mysql convert
【Android】Retrofit入门详解-程序员宅基地
文章浏览阅读1.6k次,点赞23次,收藏2次。简介:大三学生党一枚!主攻Android开发,对于Web和后端均有了解。个人语录:取乎其上,得乎其中,取乎其中,得乎其下,以顶级态度写好一篇的博客。Retrofit入门一.Retrofit介绍二.Retrofit注解2.1 请求方法注解2.1.1 GET请求2.1.2 POST请求2.2 标记类注解2.2.1 FormUrlEncoded2.2.2 Multipart2.2.3 Streaming2.3 参数类注解2.3.1 Header和Headers2.3.2 Body2.3.3 Path2.3.4_retrofit
教你拷贝所有文件到指定文件夹_所有文件夹下文件的 拷贝怎么弄-程序员宅基地
文章浏览阅读1.9k次。在处理文件的时候,如何将文件、文件夹复制到指定文件夹之中呢?打开【文件批量改名高手】,在“文件批量管理任务”中,先点“添加文件”,将文件素材导入。选好一系列的复制选项,单击开始复制,等全部复制好了,提示“已完成XX%”然后可以任意右击一个文件夹路径,在显示出的下拉列表中,选择“打开文件夹”在“复制到的目标文件夹(目录)”中,导入文件夹,多个文件夹,一行一个。最后,即可看到文件、文件夹都复制到各个指定的文件夹之中一一显示着啦。导入后,在表格中我们就可以看到文件或文件夹的名称以及所排列的序号。..._所有文件夹下文件的 拷贝怎么弄
win10和linux双系统安装步骤(详细!)_怎么装双系统win10和linux-程序员宅基地
文章浏览阅读5k次,点赞11次,收藏42次。Windows10安装ubuntu双系统教程ubuntu分区方案_怎么装双系统win10和linux
从图的邻接表表示转换成邻接矩阵表示_typedef struct arcnode{int adjvex;-程序员宅基地
文章浏览阅读1.1k次。从图的邻接表表示转换成邻接矩阵表示typedef struct ArcNode{ int adjvex;//该弧指向的顶点的位置 struct ArcNode *next;//下一条弧的指针 int weight;//弧的权重} ArcNode;typedef struct{ VertexType data;//顶点信息 ArcNode *firstarc;} VNode,AdList[MAXSIZE];typedef struct{ int vexnum;//顶点数 int _typedef struct arcnode{int adjvex;
随便推点
Lua5.3版GC机制理解_lua5.3 gc-程序员宅基地
文章浏览阅读8.3k次,点赞8次,收藏42次。目录1.Lua垃圾回收算法原理简述2.Lua垃圾回收中的三种颜色3.Lua垃圾回收详细过程4.步骤源码详解4.1新建对象阶段4.2触发条件4.3 GC函数状态机4.4标记阶段4.5清除阶段5.总结参考资料lua垃圾回收(Garbage Collect)是lua中一个比较重要的部分。由于lua源码版本变迁,目前大多数有关这个方面的文章都还是基于lua5.1版本,有一定的滞后性。因此本文通过参考当前..._lua5.3 gc
手机能打开的表白代码_能远程打开,各种手机电脑进行监控操作,最新黑科技...-程序员宅基地
文章浏览阅读511次。最近家中的潮人,老妈闲着没事干,开始学玩电脑,引起他的各种好奇心。如看看新闻,上上微信或做做其他的事情。但意料之中的是电脑上会莫名出现各种问题?不翼而飞的图标?照片又不见了?文件被删了,卡机或者黑屏,无声音了,等等问题。常常让她束手无策,求助于我,可惜在电话中说不清,往往只能苦等我回家后才能解决,那种开心乐趣一下子消失了。想想,这样也不是办法啊, 于是,我潜心寻找了两款优秀的远程控制软件。两款软件...
成功Ubuntu18.04 ROS melodic安装Cartograhper+Ceres1.13.0,以及错误总结_ros18.04 安装ca-程序员宅基地
文章浏览阅读1.8k次。二.初始化工作空间三.设置下载地址四.下载功能包此处可能会报错,请看:rosdep update遇到ERROR: error loading sources list: The read operation timed out问题_DD᭄ꦿng的博客-程序员宅基地接下来一次安装所有功能包,注意对应ROS版本 五.编译功能包isolated:单独编译各个功能包,每个功能包之间不产生依赖。编译过程时间比较长,可能需要几分钟时间。此处可能会报错:缺少absl依赖包_ros18.04 安装ca
Harbor2.2.1配置(trivy扫描器、镜像签名)_init error: db error: failed to download vulnerabi-程序员宅基地
文章浏览阅读4.1k次,点赞3次,收藏7次。Haobor2.2.1配置(trivy扫描器、镜像签名)docker-compose下载https://github.com/docker/compose/releases安装cp docker-compose /usr/local/binchmod +x /usr/local/bin/docker-composeharbor下载https://github.com/goharbor/harbor/releases解压tar xf xxx.tgx配置harbor根下建立:mkd_init error: db error: failed to download vulnerability db: database download
openFOAM学习笔记(四)—— openFOAM中的List_openfoam list-程序员宅基地
文章浏览阅读3.2k次。又是一个很底层的部分,但是也非常重要_openfoam list
C++对象的JSON序列化与反序列化探索_c++对象 json 序列化和反序列化 库-程序员宅基地
文章浏览阅读1.7w次,点赞3次,收藏15次。一:背景作为一名C++开发人员,我一直很期待能够像C#与JAVA那样,可以轻松的进行对象的序列化与反序列化,但到目前为止,尚未找到相对完美的解决方案。本文旨在抛砖引玉,期待有更好的解决方案;同时向大家寻求帮助,解决本文中未解决的问题。 二:相关技术介绍本方案采用JsonCpp来做具体的JSON的读入与输出,再结合类成员变量的映射,最终实现对象的JSON序列化与反序列化。本文不再_c++对象 json 序列化和反序列化 库