STM32F103ZET6移植FreeRTOS_stm32f103zet6 free-程序员宅基地
技术标签: stm32 FreeRTOS 嵌入式硬件 单片机
FreeRTOS是一款免费开源的轻量级操作系统
一、获取源码
方式一、官网:www.freertos.org
方式二(推荐)、托管网址:
FreeRTOS Real Time Kernel (RTOS) - Browse /FreeRTOS at SourceForge.net
找到对应的版本直接下载.ZIP文件(我这里使用的是v9.0.0版本,keil编译器)。
二、文件简介
将下载好的文件解压后我们能看到文件目录下有FreeRTOS和FreeRTOS-Plus两个文件夹以及一些网页文档,-pLus版本多是在Windows模拟器上运行的,我们只使用到FreeRTOS文件中的内容。
FreeRTOS目录下:

Source目录下:

三、系统文件移植
首先,我们需要准备一个基础工程。然后再主目录下(因个人编程习惯而定)创建一个新文件夹,用于存放FreeRTOS的相关文件。

然后,将下载的FreeRTOS文件中的Source目录下的内容全部复制到新建的这个文件中。

我用的单片机型号是M3的内核,我打算使用第四种内存管理方式。所以portable文件夹中我只保留了以下三个文件
FreeRTOSv9.0.0\FreeRTOS\Source\portable\MemMang\heap_4.c
FreeRTOSv9.0.0\FreeRTOS\Source\portable\RVDS\ARM_CM3\port.c
FreeRTOSv9.0.0\FreeRTOS\Source\portable\RVDS\ARM_CM3\port.c\portmacro.h

再从Demo文件中复制FreeRTOSConfig.h到我们的include文件夹中(我这里复制了一份改好配置的头文件,没有用官方给的)。至此文件的配置就完成了。

四、软件配置
打开keil将刚刚新建并移植过来文件的FreeRTOS文件夹中的源文件和头文件路径都添加到工程中(都学到操作系统了,keil添加文件应该很熟练了)。
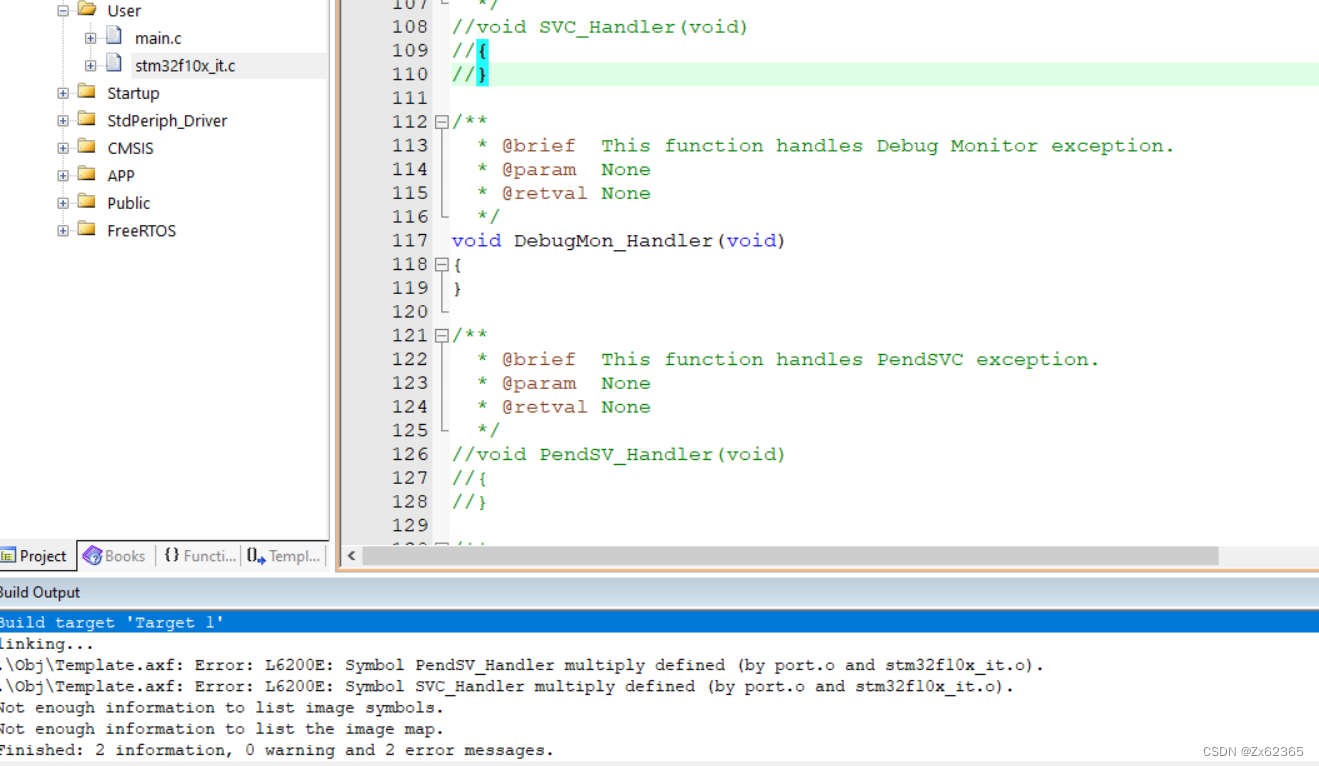
编译,应该会出现两个错误,是FreeRTOSConfig.h中的宏和stm32f10x_it.c中的函数重定义了,我们使用FreeRTOSConfig.h中的定义,将stm32f10x_it.c对应的函数注释掉。
再次编译,错误就消除了。然后我们需要修改系统的延时函数,FreeRTOS不能使用裸机的滴答定时器代码。然后修改stm32f10x_it.c中的系统定时器中断回调函数,调用操作系统已经提供函数实现的回调函数(在port.c的431行)。为保证系统的可靠性可以先加一个判断,在系统运行时再调用(调用操作系统的函数记得先包含头文件)。
extern void xPortSysTickHandler(void);//声明下函数
/**
* @brief This function handles SysTick Handler.
* @param None
* @retval None
*/
void SysTick_Handler(void)
{
if(xTaskGetSchedulerState()!=taskSCHEDULER_NOT_STARTED)//ϵͳÒѾÔËÐÐ
{
xPortSysTickHandler();
}
}附录
FreeRTOSConfig.h
#ifndef FREERTOS_CONFIG_H
#define FREERTOS_CONFIG_H
#include "system.h"
#include "usart.h"
//针对不同的编译器调用不同的stdint.h文件
#if defined(__ICCARM__) || defined(__CC_ARM) || defined(__GNUC__)
#include <stdint.h>
extern uint32_t SystemCoreClock;
#endif
//断言
#define vAssertCalled(char,int) printf("Error:%s,%d\r\n",char,int)
#define configASSERT(x) if((x)==0) vAssertCalled(__FILE__,__LINE__)
/************************************************************************
* FreeRTOS基础配置配置选项
*********************************************************************/
/* 置1:RTOS使用抢占式调度器;置0:RTOS使用协作式调度器(时间片)
*
* 注:在多任务管理机制上,操作系统可以分为抢占式和协作式两种。
* 协作式操作系统是任务主动释放CPU后,切换到下一个任务。
* 任务切换的时机完全取决于正在运行的任务。
*/
#define configUSE_PREEMPTION 1
//1使能时间片调度(默认式使能的)
#define configUSE_TIME_SLICING 1
/* 某些运行FreeRTOS的硬件有两种方法选择下一个要执行的任务:
* 通用方法和特定于硬件的方法(以下简称“特殊方法”)。
*
* 通用方法:
* 1.configUSE_PORT_OPTIMISED_TASK_SELECTION 为 0 或者硬件不支持这种特殊方法。
* 2.可以用于所有FreeRTOS支持的硬件
* 3.完全用C实现,效率略低于特殊方法。
* 4.不强制要求限制最大可用优先级数目
* 特殊方法:
* 1.必须将configUSE_PORT_OPTIMISED_TASK_SELECTION设置为1。
* 2.依赖一个或多个特定架构的汇编指令(一般是类似计算前导零[CLZ]指令)。
* 3.比通用方法更高效
* 4.一般强制限定最大可用优先级数目为32
* 一般是硬件计算前导零指令,如果所使用的,MCU没有这些硬件指令的话此宏应该设置为0!
*/
#define configUSE_PORT_OPTIMISED_TASK_SELECTION 1
/* 置1:使能低功耗tickless模式;置0:保持系统节拍(tick)中断一直运行
* 假设开启低功耗的话可能会导致下载出现问题,因为程序在睡眠中,可用以下办法解决
*
* 下载方法:
* 1.将开发版正常连接好
* 2.按住复位按键,点击下载瞬间松开复位按键
*
* 1.通过跳线帽将 BOOT 0 接高电平(3.3V)
* 2.重新上电,下载
*
* 1.使用FlyMcu擦除一下芯片,然后进行下载
* STMISP -> 清除芯片(z)
*/
#define configUSE_TICKLESS_IDLE 0
/*
* 写入实际的CPU内核时钟频率,也就是CPU指令执行频率,通常称为Fclk
* Fclk为供给CPU内核的时钟信号,我们所说的cpu主频为 XX MHz,
* 就是指的这个时钟信号,相应的,1/Fclk即为cpu时钟周期;
*/
#define configCPU_CLOCK_HZ (SystemCoreClock)
//RTOS系统节拍中断的频率。即一秒中断的次数,每次中断RTOS都会进行任务调度
#define configTICK_RATE_HZ (( TickType_t )1000)
//可使用的最大优先级
#define configMAX_PRIORITIES (32)
//空闲任务使用的堆栈大小
#define configMINIMAL_STACK_SIZE ((unsigned short)128)
//任务名字字符串长度
#define configMAX_TASK_NAME_LEN (16)
//系统节拍计数器变量数据类型,1表示为16位无符号整形,0表示为32位无符号整形
#define configUSE_16_BIT_TICKS 0
//空闲任务放弃CPU使用权给其他同优先级的用户任务
#define configIDLE_SHOULD_YIELD 1
//启用队列
#define configUSE_QUEUE_SETS 0
//开启任务通知功能,默认开启
#define configUSE_TASK_NOTIFICATIONS 1
//使用互斥信号量
#define configUSE_MUTEXES 0
//使用递归互斥信号量
#define configUSE_RECURSIVE_MUTEXES 0
//为1时使用计数信号量
#define configUSE_COUNTING_SEMAPHORES 0
/* 设置可以注册的信号量和消息队列个数 */
#define configQUEUE_REGISTRY_SIZE 10
#define configUSE_APPLICATION_TASK_TAG 0
/*****************************************************************
FreeRTOS与内存申请有关配置选项
*****************************************************************/
//支持动态内存申请
#define configSUPPORT_DYNAMIC_ALLOCATION 1
//支持静态内存
#define configSUPPORT_STATIC_ALLOCATION 0
//系统所有总的堆大小
#define configTOTAL_HEAP_SIZE ((size_t)(36*1024))
/***************************************************************
FreeRTOS与钩子函数有关的配置选项
**************************************************************/
/* 置1:使用空闲钩子(Idle Hook类似于回调函数);置0:忽略空闲钩子
*
* 空闲任务钩子是一个函数,这个函数由用户来实现,
* FreeRTOS规定了函数的名字和参数:void vApplicationIdleHook(void ),
* 这个函数在每个空闲任务周期都会被调用
* 对于已经删除的RTOS任务,空闲任务可以释放分配给它们的堆栈内存。
* 因此必须保证空闲任务可以被CPU执行
* 使用空闲钩子函数设置CPU进入省电模式是很常见的
* 不可以调用会引起空闲任务阻塞的API函数
*/
#define configUSE_IDLE_HOOK 0
/* 置1:使用时间片钩子(Tick Hook);置0:忽略时间片钩子
*
*
* 时间片钩子是一个函数,这个函数由用户来实现,
* FreeRTOS规定了函数的名字和参数:void vApplicationTickHook(void )
* 时间片中断可以周期性的调用
* 函数必须非常短小,不能大量使用堆栈,
* 不能调用以”FromISR" 或 "FROM_ISR”结尾的API函数
*/
/*xTaskIncrementTick函数是在xPortSysTickHandler中断函数中被调用的。因此,vApplicationTickHook()函数执行的时间必须很短才行*/
#define configUSE_TICK_HOOK 0
//使用内存申请失败钩子函数
#define configUSE_MALLOC_FAILED_HOOK 0
/*
* 大于0时启用堆栈溢出检测功能,如果使用此功能
* 用户必须提供一个栈溢出钩子函数,如果使用的话
* 此值可以为1或者2,因为有两种栈溢出检测方法 */
#define configCHECK_FOR_STACK_OVERFLOW 0
/********************************************************************
FreeRTOS与运行时间和任务状态收集有关的配置选项
**********************************************************************/
//启用运行时间统计功能
#define configGENERATE_RUN_TIME_STATS 0
//启用可视化跟踪调试
#define configUSE_TRACE_FACILITY 0
/* 与宏configUSE_TRACE_FACILITY同时为1时会编译下面3个函数
* prvWriteNameToBuffer()
* vTaskList(),
* vTaskGetRunTimeStats()
*/
#define configUSE_STATS_FORMATTING_FUNCTIONS 1
/********************************************************************
FreeRTOS与协程有关的配置选项
*********************************************************************/
//启用协程,启用协程以后必须添加文件croutine.c
#define configUSE_CO_ROUTINES 0
//协程的有效优先级数目
#define configMAX_CO_ROUTINE_PRIORITIES ( 2 )
/***********************************************************************
FreeRTOS与软件定时器有关的配置选项
**********************************************************************/
//启用软件定时器
#define configUSE_TIMERS 1
//软件定时器优先级
#define configTIMER_TASK_PRIORITY (configMAX_PRIORITIES-1)
//软件定时器队列长度
#define configTIMER_QUEUE_LENGTH 10
//软件定时器任务堆栈大小
#define configTIMER_TASK_STACK_DEPTH (configMINIMAL_STACK_SIZE*2)
/************************************************************
FreeRTOS可选函数配置选项
************************************************************/
#define INCLUDE_xTaskGetSchedulerState 1
#define INCLUDE_vTaskPrioritySet 1
#define INCLUDE_uxTaskPriorityGet 1
#define INCLUDE_vTaskDelete 1
#define INCLUDE_vTaskCleanUpResources 1
#define INCLUDE_vTaskSuspend 1
#define INCLUDE_vTaskDelayUntil 1
#define INCLUDE_vTaskDelay 1
#define INCLUDE_eTaskGetState 1
#define INCLUDE_xTimerPendFunctionCall 0
//#define INCLUDE_xTaskGetCurrentTaskHandle 1
//#define INCLUDE_uxTaskGetStackHighWaterMark 0
//#define INCLUDE_xTaskGetIdleTaskHandle 0
/******************************************************************
FreeRTOS与中断有关的配置选项
******************************************************************/
#ifdef __NVIC_PRIO_BITS
#define configPRIO_BITS __NVIC_PRIO_BITS
#else
#define configPRIO_BITS 4
#endif
//中断最低优先级
#define configLIBRARY_LOWEST_INTERRUPT_PRIORITY 15
//系统可管理的最高中断优先级
#define configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY 5
#define configKERNEL_INTERRUPT_PRIORITY ( configLIBRARY_LOWEST_INTERRUPT_PRIORITY << (8 - configPRIO_BITS) ) /* 240 */
#define configMAX_SYSCALL_INTERRUPT_PRIORITY ( configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY << (8 - configPRIO_BITS) )
/****************************************************************
FreeRTOS与中断服务函数有关的配置选项
****************************************************************/
#define xPortPendSVHandler PendSV_Handler
#define vPortSVCHandler SVC_Handler
/* 以下为使用Percepio Tracealyzer需要的东西,不需要时将 configUSE_TRACE_FACILITY 定义为 0 */
#if ( configUSE_TRACE_FACILITY == 1 )
#include "trcRecorder.h"
#define INCLUDE_xTaskGetCurrentTaskHandle 1 // 启用一个可选函数(该函数被 Trace源码使用,默认该值为0 表示不用)
#endif
#endif /* FREERTOS_CONFIG_H */
延时文件.c
#include "SysTick.h"
#include "FreeRTOS.h" //FreeRTOS使用
#include "task.h"
static u8 fac_us=0; //us延时倍乘数
static u16 fac_ms=0; //ms延时倍乘数
//初始化延迟函数
//SYSTICK的时钟固定为AHB时钟,基础例程里面SYSTICK时钟频率为AHB/8
//SYSCLK:系统时钟频率
void SysTick_Init(u8 SYSCLK)
{
u32 reload;
SysTick_CLKSourceConfig(SysTick_CLKSource_HCLK);//选择外部时钟 HCLK
fac_us=SystemCoreClock/1000000; //不论是否使用OS,fac_us都需要使用
reload=SystemCoreClock/1000000; //每秒钟的计数次数 单位为M
reload*=1000000/configTICK_RATE_HZ; //根据configTICK_RATE_HZ设定溢出时间
//reload为24位寄存器,最大值:16777216,在72M下,约合0.233s左右
fac_ms=1000/configTICK_RATE_HZ; //代表OS可以延时的最少单位
SysTick->CTRL|=SysTick_CTRL_TICKINT_Msk; //开启SYSTICK中断
SysTick->LOAD=reload; //每1/configTICK_RATE_HZ秒中断一次
SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk; //开启SYSTICK
}
//延时nus
//nus:要延时的us数.
//nus:0~204522252(最大值即2^32/fac_us@fac_us=168)
void delay_us(u32 nus)
{
u32 ticks;
u32 told,tnow,tcnt=0;
u32 reload=SysTick->LOAD; //LOAD的值
ticks=nus*fac_us; //需要的节拍数
told=SysTick->VAL; //刚进入时的计数器值
while(1)
{
tnow=SysTick->VAL;
if(tnow!=told)
{
if(tnow<told)tcnt+=told-tnow; //这里注意一下SYSTICK是一个递减的计数器就可以了.
else tcnt+=reload-tnow+told;
told=tnow;
if(tcnt>=ticks)break; //时间超过/等于要延迟的时间,则退出.
}
};
}
//延时nms
//nms:要延时的ms数
//nms:0~65535
void delay_ms(u32 nms)
{
if(xTaskGetSchedulerState()!=taskSCHEDULER_NOT_STARTED)//系统已经运行
{
if(nms>=fac_ms) //延时的时间大于OS的最少时间周期
{
vTaskDelay(nms/fac_ms); //FreeRTOS延时
}
nms%=fac_ms; //OS已经无法提供这么小的延时了,采用普通方式延时
}
delay_us((u32)(nms*1000)); //普通方式延时
}
//延时nms,不会引起任务调度
//nms:要延时的ms数
void delay_xms(u32 nms)
{
u32 i;
for(i=0;i<nms;i++) delay_us(1000);
}
stm32f10x_it.c
/**
******************************************************************************
* @file Project/STM32F10x_StdPeriph_Template/stm32f10x_it.c
* @author MCD Application Team
* @version V3.5.0
* @date 08-April-2011
* @brief Main Interrupt Service Routines.
* This file provides template for all exceptions handler and
* peripherals interrupt service routine.
******************************************************************************
* @attention
*
* THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS
* WITH CODING INFORMATION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE
* TIME. AS A RESULT, STMICROELECTRONICS SHALL NOT BE HELD LIABLE FOR ANY
* DIRECT, INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING
* FROM THE CONTENT OF SUCH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE
* CODING INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.
*
* <h2><center>© COPYRIGHT 2011 STMicroelectronics</center></h2>
******************************************************************************
*/
/* Includes ------------------------------------------------------------------*/
#include "stm32f10x_it.h"
#include "FreeRTOS.h" //FreeRTOS使用
#include "task.h"
/** @addtogroup STM32F10x_StdPeriph_Template
* @{
*/
/* Private typedef -----------------------------------------------------------*/
/* Private define ------------------------------------------------------------*/
/* Private macro -------------------------------------------------------------*/
/* Private variables ---------------------------------------------------------*/
/* Private function prototypes -----------------------------------------------*/
/* Private functions ---------------------------------------------------------*/
/******************************************************************************/
/* Cortex-M3 Processor Exceptions Handlers */
/******************************************************************************/
/**
* @brief This function handles NMI exception.
* @param None
* @retval None
*/
void NMI_Handler(void)
{
}
/**
* @brief This function handles Hard Fault exception.
* @param None
* @retval None
*/
void HardFault_Handler(void)
{
/* Go to infinite loop when Hard Fault exception occurs */
while (1)
{
}
}
/**
* @brief This function handles Memory Manage exception.
* @param None
* @retval None
*/
void MemManage_Handler(void)
{
/* Go to infinite loop when Memory Manage exception occurs */
while (1)
{
}
}
/**
* @brief This function handles Bus Fault exception.
* @param None
* @retval None
*/
void BusFault_Handler(void)
{
/* Go to infinite loop when Bus Fault exception occurs */
while (1)
{
}
}
/**
* @brief This function handles Usage Fault exception.
* @param None
* @retval None
*/
void UsageFault_Handler(void)
{
/* Go to infinite loop when Usage Fault exception occurs */
while (1)
{
}
}
/**
* @brief This function handles SVCall exception.
* @param None
* @retval None
*/
//void SVC_Handler(void)
//{
//}
/**
* @brief This function handles Debug Monitor exception.
* @param None
* @retval None
*/
void DebugMon_Handler(void)
{
}
/**
* @brief This function handles PendSVC exception.
* @param None
* @retval None
*/
//void PendSV_Handler(void)
//{
//}
extern void xPortSysTickHandler(void);
/**
* @brief This function handles SysTick Handler.
* @param None
* @retval None
*/
void SysTick_Handler(void)
{
if(xTaskGetSchedulerState()!=taskSCHEDULER_NOT_STARTED)//系统已经运行
{
xPortSysTickHandler();
}
}
/******************************************************************************/
/* STM32F10x Peripherals Interrupt Handlers */
/* Add here the Interrupt Handler for the used peripheral(s) (PPP), for the */
/* available peripheral interrupt handler's name please refer to the startup */
/* file (startup_stm32f10x_xx.s). */
/******************************************************************************/
/**
* @brief This function handles PPP interrupt request.
* @param None
* @retval None
*/
/*void PPP_IRQHandler(void)
{
}*/
/**
* @}
*/
/******************* (C) COPYRIGHT 2011 STMicroelectronics *****END OF FILE****/
main.c
#include "system.h"
#include "SysTick.h"
#include "led.h"
#include "usart.h"
#include "FreeRTOS.h"
#include "task.h"
//任务优先级
#define START_TASK_PRIO 1
//任务堆栈大小
#define START_STK_SIZE 128
//任务句柄
TaskHandle_t StartTask_Handler;
//任务函数
void start_task(void *pvParameters);
//任务优先级
#define LED1_TASK_PRIO 2
//任务堆栈大小
#define LED1_STK_SIZE 50
//任务句柄
TaskHandle_t LED1Task_Handler;
//任务函数
void led1_task(void *pvParameters);
//任务优先级
#define LED2_TASK_PRIO 3
//任务堆栈大小
#define LED2_STK_SIZE 50
//任务句柄
TaskHandle_t LED2Task_Handler;
//任务函数
void led2_task(void *pvParameters);
/*******************************************************************************
* 函 数 名 : main
* 函数功能 : 主函数
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
int main()
{
SysTick_Init(72);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4);//设置系统中断优先级分组4
LED_Init();
USART1_Init(115200);
//创建开始任务
xTaskCreate((TaskFunction_t )start_task, //任务函数
(const char* )"start_task", //任务名称
(uint16_t )START_STK_SIZE, //任务堆栈大小
(void* )NULL, //传递给任务函数的参数
(UBaseType_t )START_TASK_PRIO, //任务优先级
(TaskHandle_t* )&StartTask_Handler); //任务句柄
vTaskStartScheduler(); //开启任务调度
}
//开始任务任务函数
void start_task(void *pvParameters)
{
taskENTER_CRITICAL(); //进入临界区
//创建LED1任务
xTaskCreate((TaskFunction_t )led1_task,
(const char* )"led1_task",
(uint16_t )LED1_STK_SIZE,
(void* )NULL,
(UBaseType_t )LED1_TASK_PRIO,
(TaskHandle_t* )&LED1Task_Handler);
//创建LED2任务
xTaskCreate((TaskFunction_t )led2_task,
(const char* )"led2_task",
(uint16_t )LED2_STK_SIZE,
(void* )NULL,
(UBaseType_t )LED2_TASK_PRIO,
(TaskHandle_t* )&LED2Task_Handler);
vTaskDelete(StartTask_Handler); //删除开始任务
taskEXIT_CRITICAL(); //退出临界区
}
//LED1任务函数
void led1_task(void *pvParameters)
{
while(1)
{
LED1=0;
vTaskDelay(200);
LED1=1;
vTaskDelay(800);
}
}
//LED2任务函数
void led2_task(void *pvParameters)
{
while(1)
{
LED2=0;
vTaskDelay(800);
LED2=1;
vTaskDelay(200);
}
}
智能推荐
一个ngrok如何穿透多个端口?_ngrok多个端口-程序员宅基地
文章浏览阅读2.7k次,点赞2次,收藏4次。如何不充钱就可以穿透多个端口?./ngrok authtoken 授权码之前这个操作的生成的yml文件中修改 端口可添加多个addr:port端口可随意配置_ngrok多个端口
C语言 char转uint8_t-程序员宅基地
文章浏览阅读5.9k次。char转uint8_t:static int char2uint(char *input, uint8_t *output){ for(int i = 0; i < 24; i++) { output[i] &= 0x00; for (int j = 1; j >= 0; j--) { char hb = input[i*2 + 1 - j]; if (hb >= '0' &..._char转uint8_t
android 陀螺仪简单使用,判读手机是否静止状态_安卓陀螺仪多少才算静止-程序员宅基地
文章浏览阅读6.5k次,点赞5次,收藏13次。陀螺仪允许您在任何给定时刻确定Android设备的角速度。简单来说,它告诉您设备绕X,Y和Z轴旋转的速度有多快。最近,即使是预算手机正在制造,陀螺仪内置,增强现实和虚拟现实应用程序变得如此受欢迎。通过使用陀螺仪,您可以开发可以响应设备方向的微小更改的应用程序。创建陀螺仪对象和管理器manager// Register it, specifying the polling interv..._安卓陀螺仪多少才算静止
lib静态库逆向分析_libtersafe-程序员宅基地
文章浏览阅读4.7k次,点赞3次,收藏16次。当我们要分析一个lib库里的代码时,首先需要判断这是一个静态库还是一个导入库。库类型判断lib文件其实是一个压缩文件。我们可以直接使用7z打开lib文件,以查看里面的内容。如果里面的内容是obj文件,表明是静态库。如果里面的内容是dll文件,表明是导入库。导入库里面是不包含代码的,代码包含在对应的dll文件中。从lib中提取obj静态库是一个或者多个obj文件的打包,这里有两个方法从中提取obj:Microsoft 库管理器 7z解压Microsoft 库管理器(li_libtersafe
Linux的网络适配器_linux 查询网络适配器-程序员宅基地
文章浏览阅读5.3k次,点赞3次,收藏3次。了解一下,省的脑壳痛 桥接模式对应的虚拟网络名称“VMnet0” 桥接模式下,虚拟机通过主机的网卡进行通信,若物理主机有多块网卡(有线的和无线网卡),应选择桥结哪块物理网卡桥接模式下,虚拟机和物理主机同等地位,可以通过物理主机的网卡访问外网(局域网),一个局域网的其他计算机可以访问虚拟机。为虚拟机设置一个与物理网卡在同个网段的IP,则虚拟机就可以与物理主机以及局域..._linux 查询网络适配器
【1+X Web前端等级考证 】 | Web前端开发中级理论 (附答案)_1+xweb前端开发中级-程序员宅基地
文章浏览阅读3.4w次,点赞77次,收藏438次。# 前言2020 12月 1+X Web 前端开发中级 模拟题大致就更这么多,我的重心不在这里,就不花太多时间在这里面了。但是,说说1+X Web前端开发等级考证这个证书,总有人跑到网上问:这个证书有没有用? 这个证书含金量高不高?# 关于考不考因为这个是工信部从2019年才开始实施试点的,目前还在各大院校试点中,就目前情况来看,知名度并不是很高,有没有用现在无法一锤定音,看它以后办的怎么样把,软考以前也是慢慢地才知名起来。能考就考吧,据所知,大部分学校报考,基本不用交什么报考费(小部分学校,个别除._1+xweb前端开发中级
随便推点
项目组织战略管理及组织结构_项目组织的具体形态的是战略管理层-程序员宅基地
文章浏览阅读1.7k次。组织战略是组织实施各级项目管理,包括项目组合管理、项目集管理和项目管理的基础。只有从组织战略的高度来思考,思考各个层次项目管理在组织中的位置,才能够理解各级项目管理在组织战略实施中的作用。同时战略管理也为项目管理提供了具体的目标和依据,各级项目管理都需要与组织的战略保持一致。..._项目组织的具体形态的是战略管理层
图像质量评价及色彩处理_图像颜色质量评价-程序员宅基地
文章浏览阅读1k次。目录基本统计量色彩空间变换亮度变换函数白平衡图像过曝的评价指标多视影像因曝光条件不一而导致色彩差异,人眼可以快速区分影像质量,如何利用图像信息辅助算法判断影像优劣。基本统计量灰度均值方差梯度均值方差梯度幅值直方图图像熵p·log(p)色彩空间变换RGB转单通道灰度图像 mean = 225.7 stddev = 47.5mean = 158.5 stddev = 33.2转灰度梯度域gradMean = -0.0008297 / -0.000157461gr_图像颜色质量评价
MATLAB运用规则,利用辛普森规则进行数值积分-程序员宅基地
文章浏览阅读1.4k次。Simpson's rule for numerical integrationZ = SIMPS(Y) computes an approximation of the integral of Y via the Simpson's method (with unit spacing). To compute the integral for spacing different from one..._matlab利用幸普生计算积分
【AI之路】使用huggingface_hub优雅解决huggingface大模型下载问题-程序员宅基地
文章浏览阅读1.2w次,点赞28次,收藏61次。Hugging face 资源很不错,可是国内下载速度很慢,动则GB的大模型,下载很容易超时,经常下载不成功。很是影响玩AI的信心。经过多次测试,终于搞定了下载,即使超时也可以继续下载。真正实现下载无忧!究竟如何实现?且看本文分解。_huggingface_hub
mysql数据库查看编码,mysql数据库修改编码_查看数据库编码-程序员宅基地
文章浏览阅读3.5k次,点赞2次,收藏7次。其中 `DEFAULT CHARSET` 和 `COLLATE` 分别指定了表的默认编码和排序规则。其中 `DEFAULT CHARACTER SET` 指定了数据库的默认编码。其中 `Collation` 列指定了字段的排序规则,这也是字段的默认编码。此命令将更改表的默认编码和排序规则。此命令将更改字段的编码和排序规则。此命令将更改数据库的默认编码。_查看数据库编码
机器学习(十八):Bagging和随机森林_bagging数据集-程序员宅基地
文章浏览阅读1.3k次,点赞7次,收藏24次。本文深入探讨了集成学习及其在随机森林中的应用。对集成学习的基本概念、优势以及为何它有效做了阐述。随机森林,作为一个集成学习方法,与Bagging有紧密联系,其核心思想和实现过程均在文中进行了说明。还详细展示了如何在Sklearn中利用随机森林进行建模,并对其关键参数进行了解读,希望能帮助大家更有效地运用随机森林进行数据建模。_bagging数据集