SLAM~CH5_cv_8uc1-程序员宅基地
目录
代码来源:gaoxiang12/slambook2: edition 2 of the slambook (github.com)
一、图像
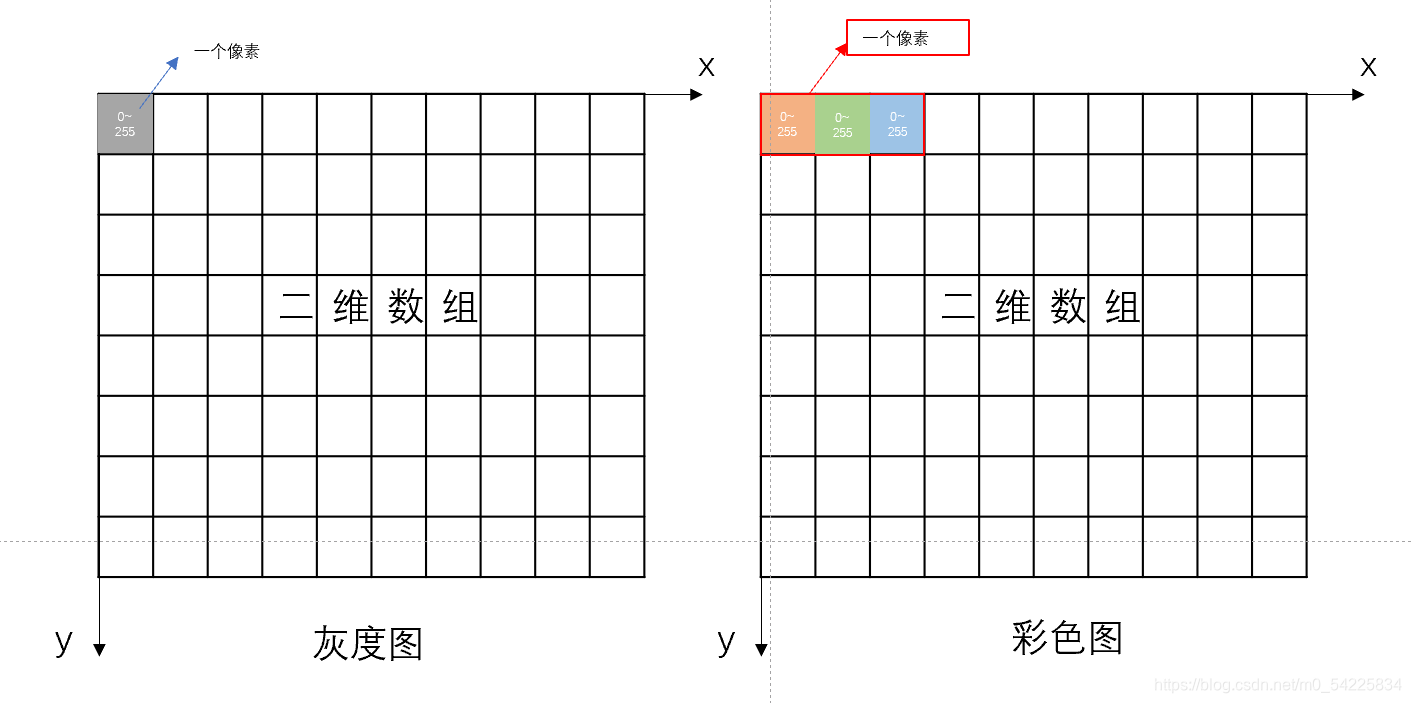
图像可以由一个二维数组来表示。
其中灰度图每一个元素的下标表示一个像素的坐标,元素的值代表0~255(unsigned short)的灰度读数。值得注意的是,我们讨论一个位于(x,y)的像素时,表示为image[y][x],因为像素平面上x相右,y向下。
在彩色图中,一个像素占据3个字节,对应三个通道(RGB)。因此,image[y][x]表示像素的第一个字节在(x,y)。而image[y][x],image[y+1][x],image[y+2][x]的值表示三个通道的值。
二、相机
A、单目相机
1.相机模型
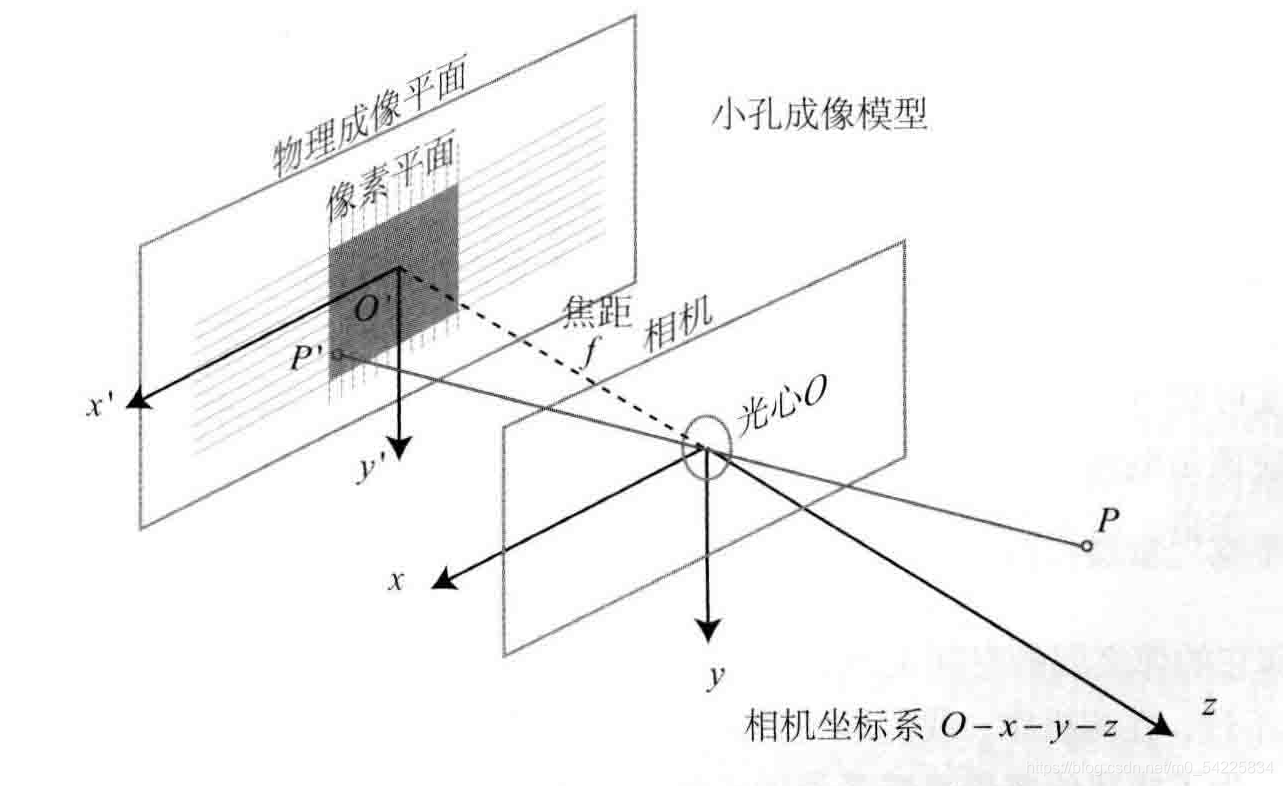
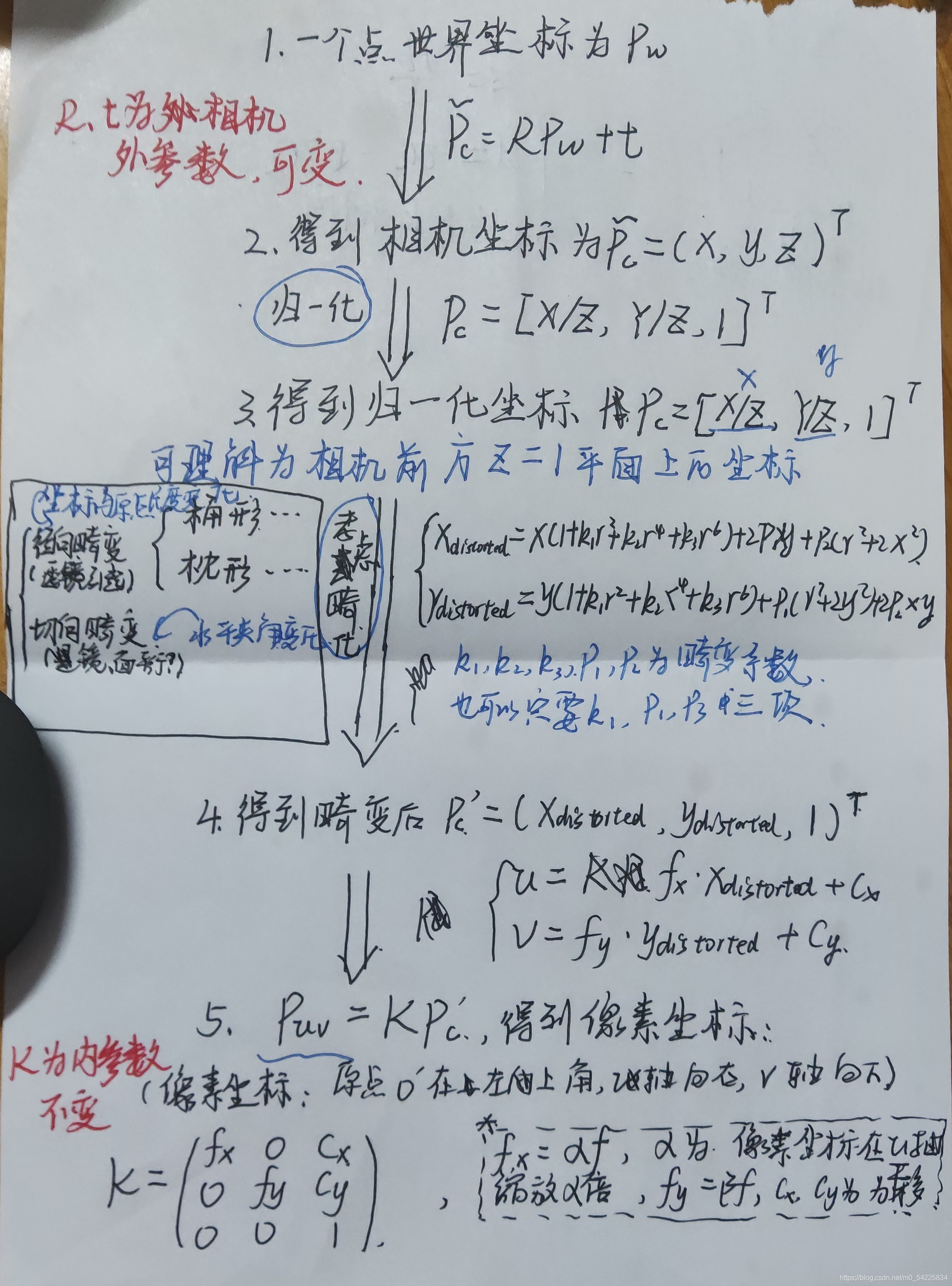
2. 成像过程
先介绍一下归一化平面:如图的+1处,即相机坐标的X、Y都除以Z:(X/Z,Y/Z,1)

3.opencv代码实战
1. 指向图像的变量(不知道可不可以理解为指针)
cv::Mat image=cv::imread("path of image",0);//后面这个0可有可无
2. 显示图像:cv::imshow("anything",image)
3. 图像基本信息
宽:image.cols 高:image.rows 通道数:image.channels()
CV_8UC1表示单通道图片,即灰度图;CV_8UC3表示三通道,即彩色图
4. 用image.ptr<unsigned char>(y)获得指向y行的行指针
unsigned char *row_ptr = image.ptr<unsigned char>(y)
5. 置0:
image(cv::Rect(0, 0, 100, 100)).setTo(0);
6. 复制(改变复制项不会对被复制项造成影响)
cv::Mat image_clone=image.clone();
直接复制相当于两个指针指向同一处
7. argv[1]指向在DOS命令行中执行程序名后的第一个字符串
所以程序里输入./executable ./image.jpg
#include <iostream>
#include <chrono> //计时
using namespace std;
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
int main(int argc, char **argv) {
// 读取argv[1]指定的图像
cv::Mat image;
image = cv::imread(argv[1]); //cv::imread函数读取指定路径下的图像
// 判断图像文件是否正确读取
if (image.data == nullptr) { //数据不存在,可能是文件不存在
cerr << "文件" << argv[1] << "不存在." << endl;
return 0;
}
// 文件顺利读取, 首先输出一些基本信息
cout << "图像宽为" << image.cols << ",高为" << image.rows << ",通道数为" << image.channels() << endl;
cv::imshow("image", image); // 用cv::imshow显示图像
cv::waitKey(0); // 暂停程序,等待一个按键输入
// 判断image的类型
if (image.type() != CV_8UC1 && image.type() != CV_8UC3) {
// 图像类型不符合要求
cout << "请输入一张彩色图或灰度图." << endl;
//CV_8UC1表示单通道图片,即灰度图,CV_8UC3表示三通道,即彩色图
return 0;
}
// 遍历图像, 请注意以下遍历方式亦可使用于随机像素访问
// 使用 std::chrono 来给算法计时
chrono::steady_clock::time_point t1 = chrono::steady_clock::now();
for (size_t y = 0; y < image.rows; y++) {
// 用cv::Mat::ptr获得图像的行指针
unsigned char *row_ptr = image.ptr<unsigned char>(y); // row_ptr是第y行的头指针
for (size_t x = 0; x < image.cols; x++) {
// 访问位于 x,y 处的像素
//x * image.channels()表示单通道一个一个过,三通道一下跳3个
unsigned char *data_ptr = &row_ptr[x * image.channels()]; // data_ptr 指向待访问的像素数据
// 输出该像素的每个通道,如果是灰度图就只有一个通道
for (int c = 0; c != image.channels(); c++) {
unsigned char data = data_ptr[c]; // data为I(x,y)第c个通道的值
}
}
}
chrono::steady_clock::time_point t2 = chrono::steady_clock::now();
chrono::duration<double> time_used = chrono::duration_cast < chrono::duration < double >> (t2 - t1);
cout << "遍历图像用时:" << time_used.count() << " 秒。" << endl;
// 关于 cv::Mat 的拷贝
// 直接赋值并不会拷贝数据
cv::Mat image_another = image;
// 修改 image_another 会导致 image 发生变化
image_another(cv::Rect(0, 0, 100, 100)).setTo(0); // 将左上角100*100的块置零
cv::imshow("image", image);
cv::waitKey(0);
//waitKey刷新图像的时间。waitKey(0)无限等待,waitKey(30)表示等待30ms
// 使用clone函数来拷贝数据
cv::Mat image_clone = image.clone();
image_clone(cv::Rect(0, 0, 100, 100)).setTo(255);
cv::imshow("image", image);
cv::imshow("image_clone", image_clone);
cv::waitKey(0);
cv::destroyAllWindows();
return 0;
}
4.图像去畸化
已知一张畸变之后的图像,内参,畸变参数,求去畸变的图像
思路:实现坐标的一一映射,再对灰度赋值
1. 设未畸变的图像的坐标为(u,v),畸变的图像坐标为(ud,vd)
2. 通过(u,v)->(x,y)
-畸变公式->(xd,yd)->(ud,vd)得到(u,v)和(ud,vd)的关系
3. 让(u,v)从(0,0)开始走,遍历到(rows,cols),确定对应的(ud,vd)的坐标
4. 把(ud,vd)对应的灰度值赋给(u,v)即得到,去畸变得图像
实现
灰度值为image.at<uchar>(v,u),直接赋值
image_undistort.at<uchar>(v, u) = image.at<uchar>((int) v_distorted, (int) u_distorted);#include <opencv2/opencv.hpp>
#include <string>
using namespace std;
string image_file = "./distorted.png"; // 请确保路径正确
int main(int argc, char **argv) {
// 本程序实现去畸变部分的代码。尽管我们可以调用OpenCV的去畸变,但自己实现一遍有助于理解。
// 畸变参数
double k1 = -0.28340811, k2 = 0.07395907, p1 = 0.00019359, p2 = 1.76187114e-05;
// 内参
double fx = 458.654, fy = 457.296, cx = 367.215, cy = 248.375;
cv::Mat image = cv::imread(image_file, 0); // 图像是灰度图,CV_8UC1
int rows = image.rows, cols = image.cols;
cv::Mat image_undistort = cv::Mat(rows, cols, CV_8UC1); // 定义去畸变以后的图
// 计算去畸变后图像的内容
for (int v = 0; v < rows; v++) {
for (int u = 0; u < cols; u++) {
// 按照公式,计算点(u,v)对应到畸变图像中的坐标(u_distorted, v_distorted)
//建立畸变图像与非畸变图像的一一映射
double x = (u - cx) / fx, y = (v - cy) / fy;//非畸变图像坐标归一化
double r = sqrt(x * x + y * y);
double x_distorted = x * (1 + k1 * r * r + k2 * r * r * r * r) + 2 * p1 * x * y + p2 * (r * r + 2 * x * x);
double y_distorted = y * (1 + k1 * r * r + k2 * r * r * r * r) + p1 * (r * r + 2 * y * y) + 2 * p2 * x * y;
double u_distorted = fx * x_distorted + cx;
double v_distorted = fy * y_distorted + cy;
// 赋值 (最近邻插值)
if (u_distorted >= 0 && v_distorted >= 0 && u_distorted < cols && v_distorted < rows) {
image_undistort.at<uchar>(v, u) = image.at<uchar>((int) v_distorted, (int) u_distorted);
}
else {
image_undistort.at<uchar>(v, u) = 0;
}
}
}
// 画图去畸变后图像
cv::imshow("distorted", image);
cv::imshow("undistorted", image_undistort);
cv::waitKey();
return 0;
}
B、双目相机
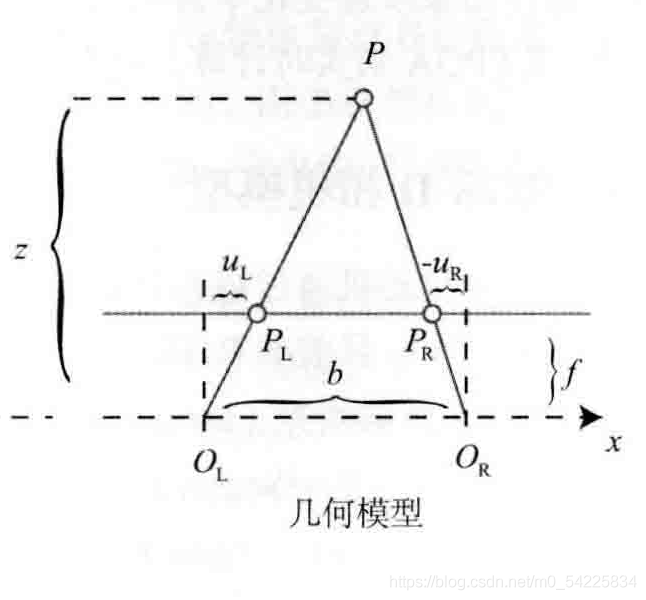
|- (u,v)和单目相机相同
|-
其中b为基线
代码实践
1. 得出d:(其实代码看不太懂)
用sgbm算法得出,disparity
cv::Ptr<cv::StereoSGBM> sgbm = cv::StereoSGBM::create(
0, 96, 9, 8 * 9 * 9, 32 * 9 * 9, 1, 63, 10, 100, 32); // 神奇的参数
cv::Mat disparity_sgbm, disparity;
sgbm->compute(left, right, disparity_sgbm);
disparity_sgbm.convertTo(disparity, CV_32F, 1.0 / 16.0f);
2. 得出深度depth=fb/disparity.at<float>(v,u);
这里disparity是一个视差图
3. 将数据存入一个向量Vector4d point(0, 0, 0, left.at<uchar>(v, u) / 255.0);生成数据点
4. 将数据点存入动态数组 vector<Vector4d, Eigen::aligned_allocator<Vector4d>> pointcloud;生成点云。
这里代码的注释来自:(1条消息) 第5讲 相机与图像_YMWM_的博客-程序员宅基地
#include <iostream>
#include <ctime>
#include <vector>
#include <unistd.h>
using namespace std;
#include <opencv2/opencv.hpp>
using namespace cv;
#include <Eigen/Core> //Eigen核心模块
using namespace Eigen;
#include <pangolin/pangolin.h>
//相机内参
double fx = 718.856, fy = 718.856, cx = 607.1928, cy = 185.2157, b = 0.573;
//文件路径
string left_file = "../left.png";
string right_file = "../right.png";
//在pangolin中画图,已写好,无需调整
void showPointCloud(const vector<Vector4d, Eigen::aligned_allocator<Vector4d>>& pointcloud);
clock_t start, last;
int main()
{
start = clock();
Mat left = imread(left_file, 0); //0表示返回一张灰度图
Mat right = imread(right_file, 0); //0表示返回一张灰度图
//调用opencv中的sgbm算法来求解深度
Ptr<StereoSGBM> sgbm = StereoSGBM::create(
0, 96, 9, 8 * 9 * 9, 32 * 9 * 9, 1, 63, 10, 100, 32
); //来自网络上的关于sgbm算法的经典参数配置
Mat disparity_sgbm, disparity;
sgbm->compute(left, right, disparity_sgbm);
disparity_sgbm.convertTo(disparity, CV_32F, 1.0 / 16.0f); //注意disparity才是最后的视差图
//生成点云
vector<Vector4d, Eigen::aligned_allocator<Vector4d>> pointcloud; //前三维为X,Y,Z,表示位置信息,后一维表示颜色信息,在此处为灰度
for(int v = 0; v < left.rows; v++)
for(int u = 0; u < left.cols; u++)
{
//设置一个Check,排除视差不在(10.0, 96.0)范围内的像素点
if(disparity.at<float>(v, u) <= 10.0 || disparity.at<float>(v, u) >= 96.0)
continue;
Vector4d point(0, 0, 0, left.at<uchar>(v, u) / 255.0); //创建一个Vector4d类型的变量,前三维用来存储位置信息,后一维为归一化之后的灰度
//根据双目模型恢复像素点的三维位置
double Z = fx * b / (disparity.at<float>(v, u));
double X = (u - cx) / fx * Z;
double Y = (v - cy) / fy * Z;
//将X,Y,Z赋值给point的前三维
point[0] = X; point[1] = Y; point[2] = Z;
pointcloud.push_back(point);
}
imshow("视差图", disparity / 96.0); //disparity/96表示归一化之后的视差图像!
waitKey(0); //停止执行,等待一个按键输入
//用pangolin画出点云
showPointCloud(pointcloud);
last = clock();
cout << "执行程序总共花费的时间为:" << (double)(last - start) * 1000 / CLOCKS_PER_SEC << "毫秒!" << endl;
return 0;
}
void showPointCloud(const vector<Vector4d, Eigen::aligned_allocator<Vector4d>>& pointcloud)
{
if(pointcloud.empty())
{
cerr << "点云为空,返回!" << endl;
return;
}
//创建一个pangolin窗口
pangolin::CreateWindowAndBind("Point Cloud Viewer", 1024, 768);
glEnable(GL_DEPTH_TEST); //根据物体远近,实现遮挡效果
glEnable(GL_BLEND); //使用颜色混合模型,让物体显示半透明效果
glBlendFunc(GL_SRC_ALPHA, GL_ONE_MINUS_SRC_ALPHA);
//GL_SRC_ALPHA表示使用源颜色的alpha值作为权重因子,GL_ONE_MINUS_SRC_ALPHA表示使用(1-源颜色的alpha值)作为权重因子
//创建一个相机观察视图,即设置相机的内参和外参
pangolin::OpenGlRenderState s_cam(
pangolin::ProjectionMatrix(1024, 768, 500, 500, 512, 389, 0.1, 1000),
pangolin::ModelViewLookAt(0, -0.1, -1.8, 0, 0, 0, 0.0, -1.0, 0.0)
);
//ProjectionMatrix()中参数依次表示相机观察视图的宽度和高度,fx, fy, cx, cy,最小深度和最大深度
//ModelViewLookAt()中参数依次为相机光心位置,被观察点位置,相机坐标系各坐标轴的正方向(000表示右下前)
//创建交互视图,显示上一帧图像内容
pangolin::Handler3D handler(s_cam); //交互视图句柄
pangolin::View &d_cam = pangolin::CreateDisplay()
.SetBounds(0.0, 1.0, pangolin::Attach::Pix(175), 1.0, -1024.0f / 768.0f)
.SetHandler(&handler);
//SetBounds()中各参数表示交互视图范围、交互视图横纵比
while(pangolin::ShouldQuit() == false) //如果pangolin视图没有被关闭,则执行
{
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT); //清空颜色和深度缓存,避免前后帧相互干扰
d_cam.Activate(s_cam); //为交互视图设置相机状态
glClearColor(1.0f, 1.0f, 1.0f, 1.0f); //设置背景颜色为白色
glPointSize(2); //设置线宽为2
//绘制点云
glBegin(GL_POINTS);
for(auto &p : pointcloud) //使用基于范围的for进行遍历
{
glColor3f(p[3], p[3], p[3]); //设置颜色信息
glVertex3d(p[0], p[1], p[2]); //设置位置信息
}
glEnd();
pangolin::FinishFrame(); //按照上面的设置执行渲染!
usleep(5000); //停止执行5毫秒
}
return;
}
C、RGB-D相机
这里代码的注释仍然来自:(1条消息) 第5讲 相机与图像_YMWM_的博客-程序员宅基地
思路:

#include <iostream>
#include <fstream>
#include <boost/format.hpp>
#include <ctime>
using namespace std;
#include <opencv2/opencv.hpp>
using namespace cv;
#include <sophus/se3.hpp>
using namespace Sophus;
#include <pangolin/pangolin.h>
typedef vector<SE3d, Eigen::aligned_allocator<SE3d>> TrajectoryType;
typedef Eigen::Matrix<double, 6, 1> Vector6d;
//在pangolin中绘制点云图
void showPointCloud(const vector<Vector6d, Eigen::aligned_allocator<Vector6d>>& pointcloud);
//相机内参
double cx = 325.5, cy = 253.5, fx = 518.0, fy = 519.0;
double depthScale = 1000.0; //现实世界中1米在深度图中存储为一个depthScale值
clock_t start, last;
int main()
{
start = clock();
vector<Mat> colorImages, depthImages; //定义彩色图向量类容器和深度图向量类容器
TrajectoryType poses; //定义相机位姿
ifstream fin("../data/pose.txt"); //创建文件输入流fin
if(!fin)
{
cerr << "找不到文件位姿文件!" << endl;
return 1;
}
for(int i = 0; i < 5; i++) //有五张图
{
//把彩色图放到colorImages中,把深度图放到depthImages中!
boost::format fmt("../data/%s/%d.%s"); //定义图像文件格式
colorImages.push_back( imread( (fmt % "color" % (i + 1) % "png").str() ) );
depthImages.push_back( imread( (fmt % "depth" % (i + 1) % "pgm").str() ) );
//把位姿放到poses中!
double tmp[7] = {0}; //用数组存储单个位姿SE3d
for(auto &val : tmp) //基于范围的for循环,auto表示自动类型推导
fin >> val; //fin表示文件输入流
//用李群存储的单个位姿
SE3d pose(Eigen::Quaterniond(tmp[6], tmp[3], tmp[4], tmp[5]),
Eigen::Vector3d(tmp[0], tmp[1], tmp[2]));
poses.push_back(pose);
}
fin.close(); //关闭文件输入流fin
//计算点云并拼接
vector<Vector6d, Eigen::aligned_allocator<Vector6d>> pointCloud; //创建一个vector<Vector6d>变量
pointCloud.reserve(1000000); //reserve()函数用来给vector预分配存储区大小,但不对该段内存进行初始化
//遍历每张图像
for(int i = 0; i < 5; i++)
{
cout << "将图像" << i + 1 << "中的点云转换到世界坐标系下!" << endl;
Mat color = colorImages[i];
Mat depth = depthImages[i];
SE3d T = poses[i]; //用SE3d表示的从当前相机坐标系到世界坐标系的变换
//遍历每个像素点
for(int v = 0; v < color.rows; v++)
for(int u = 0; u < color.cols; u++)
{
//depth.ptr<unsigned short>(v)表示行指针
unsigned int d = depth.ptr<unsigned short>(v)[u]; //深度值
if(d == 0) continue; //d为0表示没有观测到!
//计算点云在该帧相机坐标系下的坐标值
double X, Y, Z;
Z = d / depthScale; //真实世界中的深度值
X = (u - cx) * Z / fx;
Y = (v - cy) * Z / fy;
Vector3d point(X, Y, Z);
Vector3d pointWorld = T * point;
Vector6d p; //前三维表示点云的位置,后三维表示点云的颜色
p.head<3>() = pointWorld; //head<n>()函数是对于Eigen库中的向量类型而言的,表示提取前n个元素
//opencv中图像的data数组表示把其颜色信息按行优先的方式展成的一维数组!
//color.step等价于color.cols
//color.channels()表示图像的通道数
p[5] = color.data[v * color.step + u * color.channels()]; //蓝色分量
p[4] = color.data[v * color.step + u * color.channels() + 1]; //绿色分量
p[3] = color.data[v * color.step + u * color.channels() + 2]; //红色分量
pointCloud.push_back(p);
}
}
cout << "总共有" << pointCloud.size() << "个点云!" << endl;
showPointCloud(pointCloud);
last = clock();
cout << "程序总共花费的时间为:" << (double)(last - start) * 1000 / CLOCKS_PER_SEC << "毫秒!" << endl;
return 0;
}
void showPointCloud(const vector<Vector6d, Eigen::aligned_allocator<Vector6d>>& pointcloud)
{
if(pointcloud.empty())
{
cerr << "点云是空的!" << endl;
return;
}
//生成一个pangolin窗口
pangolin::CreateWindowAndBind("Point Cloud Viewer", 1024, 768);
glEnable(GL_DEPTH_TEST); //使能遮挡渲染
glEnable(GL_BLEND); //使用颜色混合模式
glBlendFunc(GL_SRC_ALPHA, GL_ONE_MINUS_SRC_ALPHA);
//使用(源图像的alpha值)作为权重因子,使用(1-源图像的alpha值)作为权重因子
//设置相机状态
pangolin::OpenGlRenderState s_cam(
pangolin::ProjectionMatrix(1024, 768, 500, 500, 512, 389, 0.1, 1000),
pangolin::ModelViewLookAt(0, -0.1, -1.8, 0, 0, 0, 0.0, -1.0, 0.0)
);
//ProjectionMatrix()中参数依次为pangolin窗口的宽度、pangolin窗口的高度、fx、fy、cx、cy、最小深度值和最大深度值
//ModelViewLookAt()中各参数依次为相机位置、被观察点位置和相机各轴正方向(000表示右下前)
//设置相机窗口
pangolin::View &d_cam = pangolin::CreateDisplay()
.SetBounds(0.0, 1.0, pangolin::Attach::Pix(175), 1.0, -1024.0f / 768.0f)
.SetHandler(new pangolin::Handler3D(s_cam));
while(pangolin::ShouldQuit() == false)
{
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT); //清除深度和颜色缓存
d_cam.Activate(s_cam); //设置相机状态
glClearColor(1.0f, 1.0f, 1.0f, 1.0f); //设置相机视图背景颜色
//绘制点云
glBegin(GL_POINTS); //绘制点开始指令
for(auto &p : pointcloud)
{
glPointSize(2); //设置点的大小
glColor3d(p[3] / 255.0, p[4] / 255.0, p[5] / 255.0);
glVertex3d(p[0], p[1], p[2]);
}
glEnd(); //绘制点结束指令
pangolin::FinishFrame(); //按照上述设置执行渲染,并显示在pangolin窗口中
usleep(5000); //程序停止执行5毫秒!
}
return;
}
智能推荐
c# ( winform )/ javaswing 通信录管理系统源码_winform通讯录源码-程序员宅基地
文章浏览阅读48次。c#(winform)/javaswing 通信录管理系统源码此系统同时支持mysql,sqlserver,sqlite三种数据库,有javaswing窗体和C#窗体两套代码。_winform通讯录源码
sharding-datasource之JPA基于MultiTenant动态切换数据源_currenttenantidentifierresolver-程序员宅基地
文章浏览阅读1.1k次。介绍基于sharding-datasource, jpa进行分库操作, 基于AbstractDataSourceBasedMultiTenantConnectionProviderImpl, CurrentTenantIdentifierResolver动态切换数据源SaaS服务多租户介绍,每个租户的资源都是独立的,从入口到应用部署到数据,都是完全隔离的。每个租户相当于“托管”在提供服务的公司里面,公司做的其实是统一运维。好处在于,这个隔离非常彻底,基本不太会有相互影响;如果有特殊客户要求的定制化,_currenttenantidentifierresolver
Good Site-程序员宅基地
文章浏览阅读106次。[url=http://d.hatena.ne.jp/ntaku/searchdiary?word=%2A%5BAndroid%5D][Android]Androidの開発環境構築[/url][url]http://www.adakoda.com/android/000062.html[/url][url]http://www.cnmsdn.com/t/12/[/url][url]ht...
50w字+的Java技术类校招面试题汇总,HR的话扎心了_50w 面试-程序员宅基地
文章浏览阅读165次。前言刚刚过去的双十一,让“高性能”“高可用”“亿级”这3个词变成了技术热点词汇,也让很多人再次萌发成为「架构师」的想法。先问大家一个问题:你觉得把代码熟练、完成需求加上点勤奋,就能成为架构师么?如果你这么认为,那你注定只能是“码农”。从业这么多年,我见过太多普通程序员做到架构师的例子,但更多的人在听话地把需求做出来,既不考虑更优解,也不考虑技术原理,重复千篇一律的代码,以为只要代码写的好就能做「架构师」前段时间,还有哥们儿吐槽说,他们公司的架构师编程能力还不如他,伤感自己”怀才不遇“。但其实,架构师看的是_50w 面试
数据结构与算法之快速排序_数据结构快速排序-程序员宅基地
文章浏览阅读1.3w次,点赞12次,收藏25次。快速排序概念 代码实现 时间复杂度_数据结构快速排序
【路径规划】蚁群算法栅格地图路径规划及避障【含Matlab源码 2088期】_格栅地图蚁群算法-程序员宅基地
文章浏览阅读768次。蚁群算法栅格地图路径规划及避障完整的代码,方可运行;可提供运行操作视频!适合小白!_格栅地图蚁群算法
随便推点
巨杉数据库 CTO 王涛:新一代分布式数据库-程序员宅基地
文章浏览阅读944次。2019数据技术嘉年华于11月16日在京落下了帷幕。大会历时两天,来自全国各地上千名学术精英、数据库领袖人物、数据库专家、技术爱好者在这里汇聚一堂,围绕“开源 • 智能 ..._巨杉数据库 王涛
最全css居中:水平居中+垂直居中+水平/垂直居中总结_style 水平居中-程序员宅基地
文章浏览阅读285次。一.水平居中1. 行内元素<style> #father { width: 500px; height: 300px; background-color: skyblue; text-align: center; //看父级是否为块级元素,是则父级设置text-align:center //如果不是:父级先设置为块级元素,然后再居中 (即display:block ;text-alig_style 水平居中
【愚公系列】2024年02月 《网络安全应急管理与技术实践》 015-网络安全应急技术与实践(Web层-文件上传漏洞)-程序员宅基地
文章浏览阅读2.7w次,点赞8次,收藏9次。文件上传漏洞是指网站对于用户上传文件的验证过程不严格,导致攻击者可以上传恶意文件到服务器上执行任意代码或者获取敏感信息的安全漏洞。安全问题说明1. 代码执行攻击者可以上传包含恶意代码的可执行文件,通过执行这些代码来攻击服务器,例如获取敏感信息、操控服务器等。上传的可执行文件中包含恶意代码,攻击者可以通过执行该代码来实现攻击目的。2. 文件覆盖攻击者可以通过上传同名文件覆盖服务器上的原始文件,导致原始文件的内容被篡改或者删除。
从数据仓库到大数据,数据平台这25年是怎样进化的?[转]-程序员宅基地
文章浏览阅读76次。从数据仓库到大数据,数据平台这25年是怎样进化的?大数据平台 [email protected]年前 (2016-03-23)5778℃2评论从「数据仓库」一词到现在的「大数据」,中间经历了太多的知识、架构模式的演进与变革。数据平台这25年究竟是怎样进化的?让InfoQ特约老司机为你讲解。我是从2000年开始接触数据仓库,大约08年开始进入互联网行业。很多从传统企业数..._从数据仓库到大数据,数据平台这 25 年是怎样进化的
关于使用Java后台导入excel文件,读取数据后,更新数据库,并返回数据给到前端的相关问题总结_excel 导入时第一条导入后将第一条的数据返回-程序员宅基地
文章浏览阅读2.2k次。在之前的项目中,使用到了Java后台读取excel文件数据的功能点,本想着该功能点已经做过了,这一类的应该都大差不离,不过在刚结束的一个项目中,现实给我深深的上了一课,特此编写此片博客,以作记录,并给自己提个醒,Java真的是浩瀚如海呀,任何时候其实自己都是小白,懂得越多越发谨慎。Java后台读取excel文件数据该功能点一般与Java导出excel文件这个功能点配合使用。实际上此次的问题与之前的最大区别在于,之前导出excel文件时,明确知道导出的数据每一列的字段详情,导入excel文件数据时,数据格_excel 导入时第一条导入后将第一条的数据返回
一例JAVA多线程访问卡死的现象_http-nio-8181-exec-4 线程过多导致卡死-程序员宅基地
文章浏览阅读6.9k次。 最近适配摄像头,自然的就要接收、传递音频视频数据。而这些数据是非常频繁的,如果每次都新建缓冲区,一个是影响性能,另外也显得自己水平太低。怎么办?上缓存。 音频、视频当然要分开缓存。代码很类似,自然的吾就新建了一个类, 起名?Manager显然不合适,叫Worker最好。Queue、Cache都不是太适合。 数据队列LinkedBlockingDeque,缓存用Concurre..._http-nio-8181-exec-4 线程过多导致卡死