ROS 导航——SLAM之用Gmapping构建一张地图_ros gmapping建图-程序员宅基地
用Gmapping构建一张地图
Gmapping功能包介绍
参见wiki官网 Gmapping功能包.其中包括了Gmapping功能包订阅发布的话题,参数等。
使用Gmapping功能包的一些准备
根据官网介绍,Gmapping订阅了两个话题:/tf 和 /scan
/tf
tf指的是坐标变换,就是将机器人各组件的相对位置关系表示出来,对于Gmapping而言,它需要三个tf:雷达,机器人基坐标和里程计
雷达和机器人基座标
对于雷达和机器人基座标,我们可以有两种发布的方法。
第一种:通过urdf建立机器人模型,然后写一个launch文件将模型文件载入并发布机器人的状态信息给tf。urdf是一种机器人建模的一种方法,具体参见urdf wiki官网
launch文件示例如下:
<?xml version="1.0"?>
<launch>
<!--param name="/use_sim_time" value="true"/ -->
<arg name="model" />
<!-- 加载机器人模型参数 -->
<param name="robot_description" command="$(find xacro)/xacro --inorder $(find robot_description)/src/urdf/robot_model.xacro" />
<!-- 设置GUI参数,显示关节控制插件 -->
<param name="use_gui" value="false"/>
<!-- 运行joint_state_publisher节点,发布机器人的关节状态 -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" />
<!-- 运行robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher" />
<!-- 运行rviz可视化界面 -->
<node name="rviz" pkg="rviz" type="rviz" />
</launch>
第二种:调用tf的API,编写代码发布tf。具体参见 tf API wiki官网。
里程计
里程计发布的是base_link → odom坐标变换,其中base_link是上面所说的机器人基坐标,odom是世界坐标系中固定的一个坐标。里程计反映的是机器人行驶的轨迹,本质也是坐标变换,这个坐标变换通常是由机器人的速度与时间计算出来的(也有视觉里程计等,原理完全不一样),所以里程计的发布实际上是不断地读取速度和时间信息,计算成坐标填充到ROS的消息里。
时间信息可以由ROS帮我们计算,而速度信息需要结合机器人的实际情况,通常由电机编码器将速度反馈给电机驱动器的控制板(也就是所谓的下位机),然后由控制板发布给上位机。
以Arduino Uno作为控制板为例,发布里程计的示例代码如下:
/*
* rosserial Planar Odometry Example
*/
#include <ros.h>
#include <ros/time.h>
#include <tf/tf.h>
#include <tf/transform_broadcaster.h>
ros::NodeHandle nh;
geometry_msgs::TransformStamped t;
tf::TransformBroadcaster broadcaster;
double x = 1.0;
double y = 0.0;
double theta = 1.57;
char base_link[] = "/base_link";
char odom[] = "/odom";
void setup()
{
nh.initNode();
broadcaster.init(nh);
}
void loop()
{
// drive in a circle
double dx = 0.2;
double dtheta = 0.18;
x += cos(theta)*dx*0.1;
y += sin(theta)*dx*0.1;
theta += dtheta*0.1;
if(theta > 3.14)
theta=-3.14;
// tf odom->base_link
t.header.frame_id = odom;
t.child_frame_id = base_link;
t.transform.translation.x = x;
t.transform.translation.y = y;
t.transform.rotation = tf::createQuaternionFromYaw(theta);
t.header.stamp = nh.now();
broadcaster.sendTransform(t);
nh.spinOnce();
delay(10);
}
/scan
/scan中发布的是激光雷达传感器的信息,这些信息用于描述周围障碍物。
该话题的发布需要结合激光雷达本身的数据来发布,消息格式参见wiki官网
发布话题的代码示例如下
#include <ros/ros.h>
#include <sensor_msgs/LaserScan.h>
int main(int argc, char** argv){
ros::init(argc, argv, "laser_scan_publisher");
ros::NodeHandle n;
ros::Publisher scan_pub = n.advertise<sensor_msgs::LaserScan>("scan", 50);
//A real application would pull the following data from their laser driver
unsigned int num_readings = 100;
double laser_frequency = 40;
double ranges[num_readings];
double intensities[num_readings];
int count = 0;
ros::Rate r(1.0);
while(n.ok()){
//generate some fake data for our laser scan,
//Populate the dummy laser data with values that increase by one every second.
for(unsigned int i = 0; i < num_readings; ++i){
ranges[i] = count;
intensities[i] = 100 + count;
}
ros::Time scan_time = ros::Time::now();
//populate the LaserScan message,
//Create a scan_msgs::LaserScan message and fill it with the data
//that we've generated in preparation to send it over the wire.
sensor_msgs::LaserScan scan;
scan.header.stamp = scan_time;
scan.header.frame_id = "laser_frame";
scan.angle_min = -1.57;
scan.angle_max = 1.57;
scan.angle_increment = 3.14 / num_readings;
scan.time_increment = (1 / laser_frequency) / (num_readings);
scan.range_min = 0.0;
scan.range_max = 100.0;
scan.ranges.resize(num_readings);
scan.intensities.resize(num_readings);
for(unsigned int i = 0; i < num_readings; ++i){
scan.ranges[i] = ranges[i];
scan.intensities[i] = intensities[i];
}
//Publish the message over ROS
scan_pub.publish(scan);
++count;
r.sleep();
}
}
使用Gmmaping功能包
当 /tf 和 /scan话题都准备好后,我们就可以用一个launch文件来使用Gmapping功能包了。
launch文件示例如下:
<?xml version="1.0"?>
<launch>
<!--Run robot model -- >
<include file="$(find robot_description)/launch/display.launch" />
<!--Publish odom-->
<node name="odom_pub" pkg="odom_pub" type="odom_pub_node">
<!--Run lidar-->
<node name="lidar" pkg="lidar" type="lidar_node">
<!--Run Gmapping-->
<node name="slam_gmapping" pkg="gmapping" type="slam_gmapping" output="screen">
<remap from="scan" to="/scan"/>
</node>
</launch>
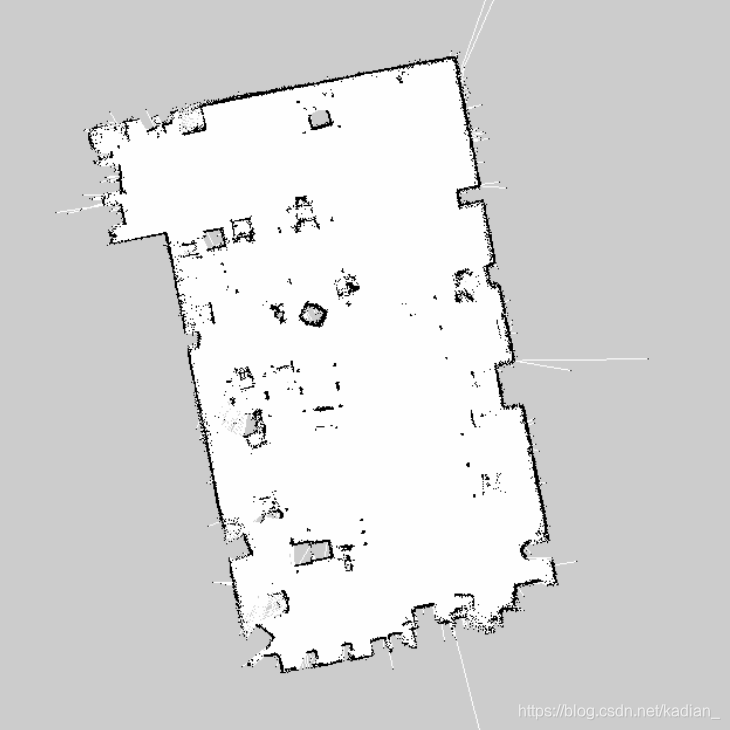
得到的地图
运行Gmapping后,进入rviz可以看到建图的实时进程。等地图建好后,可以用map_server功能包来保存地图,使用map_server的命令如下:
rosrun map_server map_saver map:=/<Map Topic> -f PATH_TO_YOUR_FILE/mymap
保存完成后得到如下所示的一张栅格图
智能推荐
python服务器端开发面试_【网易游戏Python面试】python 服务端开发-看准网-程序员宅基地
文章浏览阅读145次。10.21终面已参加,希望能顺利通过终面拿到offer~一共三轮,电话面试+笔试+视频面试,视频面试3V110月19日投的新媒体运营的简历,HR说因为是周末,等工作日再联系我,在周一下午三点我接到了电话成功通过简历筛选和电话面试,整个电话面试的过程长,大概10分钟左右,因为前期稍微做了一些准备,所以还算对答如流,整个过程顺利,HR现场告诉我通过面试,并随即给我发了笔试题,让我准备一下,最晚三天之..._网易 python游戏服务器
MVC层次划分简述_mvc分层-程序员宅基地
文章浏览阅读6.5k次,点赞12次,收藏38次。MVC层次划分简述写在前面的一段话:首先要知道MVC和三层架构之间有什么关系:MVC:【 Model(数据模型) - View(视图) - Controller(控制器) 】三层架构:【 Presentation tier(展现层) - Application tier(应用层)+Date tier(数据访问层) 】很多人都有一个误解,认为Spring MVC的M、V、C对..._mvc分层
Flink的sink实战之三:cassandra3_flink cassandra-程序员宅基地
文章浏览阅读2.9k次。实践flink数据集sink到cassandra3_flink cassandra
使用docker安装codimd,搭建你自己的在线协作markdown编辑器_群晖 docker 搭建 codimd-程序员宅基地
文章浏览阅读7.1k次,点赞4次,收藏12次。文章目录一、前言二、codimd是什么?2.1 源于hackmd的超好用markdown编辑器2.2 codimd的作用三、安装和使用3.1 安装前需要知道的3.2 安装步骤3.2.1 创建数据库3.2.2 安装git3.2.3 安装docker3.2.4 安装docker compose3.2.5 安装codimd3.2.6 检查是否安装成功3.2.7 放行端口3.2.8 测试使用3.3 开始写..._群晖 docker 搭建 codimd
Json和ajax-程序员宅基地
文章浏览阅读335次。Json json 可以定义多种类型 var jsonObj = { "key1":123, "key2":"name", "key3":[12,"age",true], //数组 "key4":false, "key5":{ //存一个json对象 "key6":456, "key7":"number" }} json其实就是一个Object对象, 他的key值 可以看成对象的一个属性, 获取他的value值...
ssm超市账单管理系统a2e96【独家源码】 应对计算机毕业设计困难的解决方案-程序员宅基地
文章浏览阅读87次。选题背景:超市账单管理系统是一种针对超市行业的管理工具,旨在提供高效、准确、便捷的账单管理服务。随着城市化进程的加快和人们生活水平的提高,超市作为日常生活必需品的主要供应渠道之一,扮演着重要的角色。然而,传统的超市账单管理方式存在一些问题,如手工记录容易出错、数据整理繁琐、信息不透明等。因此,开发一个科技化的超市账单管理系统成为了必要之举。选题意义:首先,超市账单管理系统的开发可以提高账单管理的效率。传统的超市账单管理方式通常需要员工手动记录商品销售信息,并进行数据整理和汇总。这种方式容易出现人为错
随便推点
bookmarks_2021_9_28_拾度智能科技 att7022eu-程序员宅基地
文章浏览阅读1.7k次。书签栏通讯 s7-1200与s7-200smart通讯-工业支持中心-西门子中国IO_deviceS7-1200PROFINET通信ET 200SP 安装视频 - ID: 95886218 - Industry Support Siemens云平台接入在线文档 - 低代码开发嵌入式设备 | 物一世 WareExpress在linux下使用c语言实现MQTT通信(一.MQTT原理介绍及流程图)_qq_44041062的博客-程序员宅基地C mqtt_百度搜索开发快M_拾度智能科技 att7022eu
国家取消职称英语与计算机,全国职称英语考试取消-程序员宅基地
文章浏览阅读1.6k次。职称英语全称为全国专业技术人员职称英语等级考试,是由国家人事部组织实施的一项国家级外语考试。1.概述全国专业技术人员职称英语等级考试是由人力资源和社会保障部组织实施的一项外语考试,它根据英语在不同专业领域活动中的应用特点,结合专业技术人员掌握和应用英语的实际情况,对申报不同级别职称的专业技术人员的英语水平提出了不同的要求。该考试根据专业技术人员使用英语的实际情况,把考试的重点放在了阅读理解上面。全..._全国专业技术人员职称英语等级考试 北京 取消
where里能用max吗_网络里能找到真爱吗?-程序员宅基地
文章浏览阅读42次。恋爱指导篇 知心的小爱“真爱”是一个永不过时的话题,古代的人找对象,靠的是媒妁之言,父母定婚姻。现代的人靠的是相亲,自由恋爱,按理找一个喜欢的人结婚会很幸福,近几年反而离率更高了。古代人认识的人少,交流工具少,最多信鸽传书,信物传情。现代要认识一个人很容易了,最初是电话信息联系。前几年是qq,微信摇一摇,近两年是抖音,快手随便找一找。虽然找对象,寻伴侣更方便了,为何大部分人还是感觉更迷茫,不快乐...
刷题记录第八十天-修剪二叉搜索树-程序员宅基地
文章浏览阅读109次。【代码】刷题记录第八十天-修剪二叉搜索树。
dcm4che,WADO相关-程序员宅基地
文章浏览阅读248次。关于 dcm4che WADO WADO:Web Access to DICOM Objects dcm4che 是一个为医疗保健企业的开源应用程序和工具集合。这些应用程序已经开发了Java编程语言的性能和便携性,在JDK 1.6及更高版本支持部署。在dcm4che项目的核心是一个强大的执行DICOM标准的。该dcm4che-1.x和dcm4che-2.X DICOM Tool..._dcm4che实现wado服务
linux查看zk日志,14.1 zookeeper日志查看-程序员宅基地
文章浏览阅读2.2k次。zookeeper服务器会产生三类日志:事务日志、快照日志和log4j日志。在zookeeper默认配置文件zoo.cfg(可以修改文件名)中有一个配置项dataDir,该配置项用于配置zookeeper快照日志和事务日志的存储地址。在官方提供的默认参考配置文件zoo_sample.cfg中,只有dataDir配置项。其实在实际应用中,还可以为事务日志专门配置存储地址,配置项名称为dataLogD..._linux查看zookeeper日志