Win10系统PCL + VS2019的安装_pcl-1.11.1-pdb-msvc2019-win64-程序员宅基地
系统环境:win10 64位,VS2019已安装 anaconda virtualenv python3.7 等已安装。
现需要安装 PCL,但因系统里安装的是VS2019,因此要选择合适的PCL版本。
现在匹配的版本:VS2019 + PCL1.11.1
1. 下载安装C++版本的PCL
本机VS2019,在 https://github.com/PointCloudLibrary/pcl/releases/ 上选择支持的版本为1.11.1。

下载完毕,安装即可。注意里面有一个选项要选为所有用户添加path。
安装完以后会让安装一个第三方的库,直接默认安装即可。
安装到最后的时候会弹出安装OpenNI的提示(如果没有弹出,则到 PCL 1.11.1\3rdParty\ 目录下找到OpenNI-Windows-x64-2.2.msi 进行安装),此时也会选择安装路径,默认是C盘。但此前安装已经在pcl的安装目录下的3rdParty文件夹中已经有了空的OpenNI2文件夹,建议将OpenNI安装路径改到此文件夹下,即安装路径为“C:\Program Files\PCL 1.11.1\3rdParty\OpenNI2”
解压“pcl-1.11.1-pdb-msvc2019-win64.zip”,将解压得到的文件夹中的内容添加“…\PCL 1.11.0\bin”中。
pcl库安装完成,接下来配置环境变量,在系统环境变量中,确认添加以下路径:
C:\Program Files\PCL 1.11.1\bin
C:\Program Files\PCL 1.11.1\3rdParty\VTK\bin
C:\Program Files\PCL 1.11.1\3rdParty\OpenNI2\Redist
否则后面可能会报错“由于找不到OpenNI2.dll,无法继续执行代码。重新安装程序可能会解决此问题”。
配置完环境变量后,重启电脑即可生效。
2. VS2019中配置pcl1.11.1
1)在VS中新建一个VC++空项目,编译环境改为X64,Release版本。
2)打开项目的属性管理器,在 Release | X64 属性下 右键选择添加新项目属性表。
命名:PCL1_11_X64,然后添加,则可以看到新生成的 PCL1_11_X64.props。
3)打开PCL1_11_X64属性表,修改VC++目录的包含目录:
C:\Program Files\PCL 1.11.1\include\pcl-1.11
C:\Program Files\PCL 1.11.1\3rdParty\Boost\include\boost-1_74
C:\Program Files\PCL 1.11.1\3rdParty\Eigen\eigen3
C:\Program Files\PCL 1.11.1\3rdParty\FLANN\include
C:\Program Files\PCL 1.11.1\3rdParty\Qhull\include
C:\Program Files\PCL 1.11.1\3rdParty\VTK\include\vtk-8.2
C:\Program Files\PCL 1.11.1\3rdParty\OpenNI2\Include
vc++目录->库目录 中添加以下6个目录:
C:\Program Files\PCL 1.11.1\lib
C:\Program Files\PCL 1.11.1\3rdParty\Boost\lib
C:\Program Files\PCL 1.11.1\3rdParty\FLANN\lib
C:\Program Files\PCL 1.11.1\3rdParty\Qhull\lib
C:\Program Files\PCL 1.11.1\3rdParty\VTK\lib
C:\Program Files\PCL 1.11.1\3rdParty\OpenNI2\Lib
C/C++—>预处理器—>预处理器定义:
BOOST_USE_WINDOWS_H
NOMINMAX
_CRT_SECURE_NO_DEPRECATE
C/C++ ->所有选项->SDL检查 改为否。
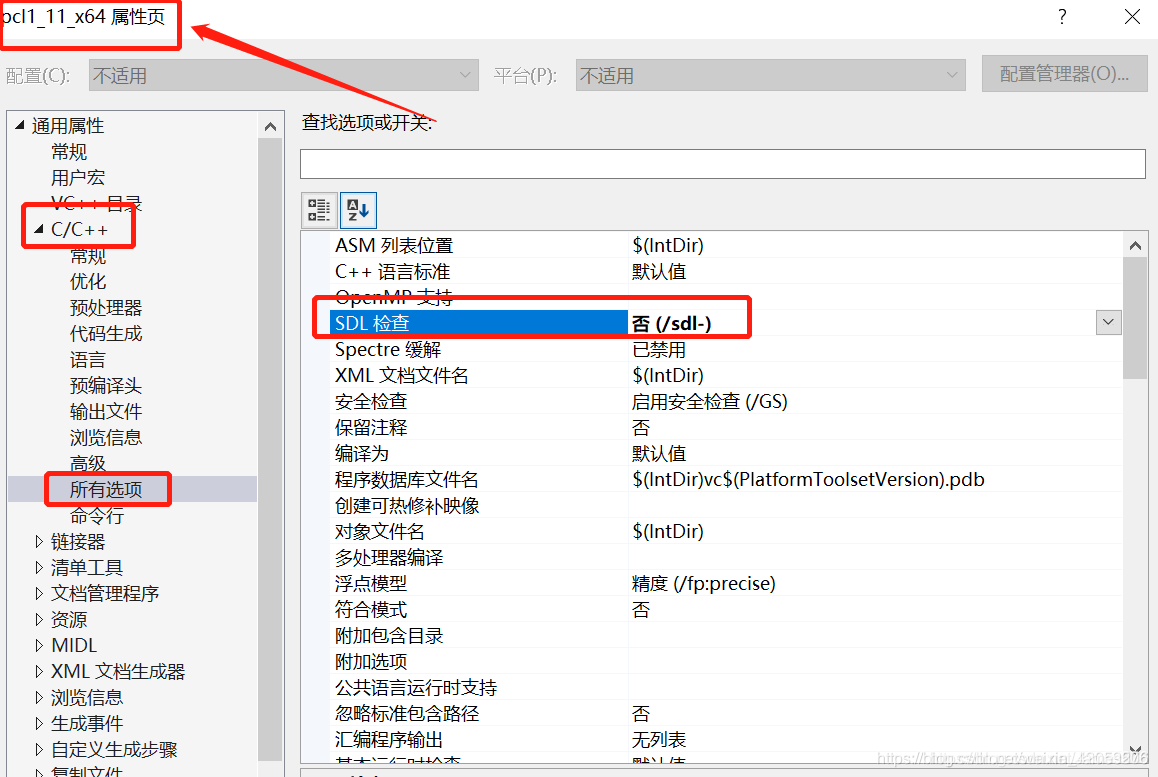
上面这个是在属性页里改的,最好在项目属性里,也把SDL检查改为“否”,有的时候会报错。
项目->属性->C/C++ ->所有选项->SDL检查
链接器—>输入—>附加的依赖项:
将 PCL 1.11.1\3rdParty\VTK\lib 和 PCL 1.11.1\lib 这两个文件夹下的lib文件的release版本添加到附加依赖项中。

因上述lib目录下的文件太多,为了方便,可以通过批处理把文件夹中的文件名写入到一个txt中。
//win+r调出“运行”窗口并输出cmd
//(填自己的路径)
cd /d D:\programming\PCL 1.11.0\lib
dir /b *.lib *>0.txt因为我安装在 C 盘,使用cmd是权限不够,必须要用带管理员权限的power shell。输出文件可能需要用记事本编辑一下才可以使用。
输入到属性表里边的时候必须一行对应一个lib。
处理 vtk 的lib后,里面包含了 debug 和 release 两种版本,需要区分开,带有 d 或者 gd 的为debug版本。
可以采用以下代码处理:
#include <iostream>
#include <string>
#include <fstream>
#include <iostream>
using namespace std;
int main()
{
ifstream txtfile;//打开读取的文件
ofstream txt01;//保存的文件
ofstream txt02;//保存的文件
string temp;
int index = 0;//用于判断奇偶
txtfile.open("0.txt", ios::in);
while (!txtfile.eof()) // 若未到文件结束一直循环
{
getline(txtfile, temp);//一行一行读取
if (index % 2 == 0)//判断除以2的余数,即为奇偶的判断
{
txt01.open("1.txt", ios::app);
txt01 << temp;
txt01 << endl;
txt01.close();
}
else
{
txt02.open("2.txt", ios::app);
txt02 << temp;
txt02 << endl;
txt02.close();
}
index++;
}
txtfile.close(); //关闭文件
txtfile.close();
txt01.close();
txt02.close();
return 0;
}到此为止,环境基本配置完毕。
3. 测试代码
#include <iostream>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
int main(int argc, char** argv)
{
pcl::PointCloud<pcl::PointXYZ> cloud; // Fill in the cloud data
cloud.width = 5;
cloud.height = 1;
cloud.is_dense = false;
cloud.points.resize(cloud.width * cloud.height);
for (std::size_t i = 0; i < cloud.points.size(); ++i)
{
cloud.points[i].x = 1024 * rand() / (RAND_MAX + 1.0f);
cloud.points[i].y = 1024 * rand() / (RAND_MAX + 1.0f);
cloud.points[i].z = 1024 * rand() / (RAND_MAX + 1.0f);
}
pcl::io::savePCDFileASCII("test_pcd.pcd", cloud);
std::cerr << "Saved " << cloud.points.size() << " data points to test_pcd.pcd." << std::endl;
for (std::size_t i = 0; i < cloud.points.size(); ++i)
std::cerr << " " << cloud.points[i].x << " " << cloud.points[i].y << " " << cloud.points[i].z << std::endl;
return (0);
}输出下图(数字可能不同),则表示安装成功!

参考链接:
https://www.jb51.net/article/190710.htm
https://blog.csdn.net/weixin_42059276/article/details/106149359
智能推荐
在ubuntu 8.04下安装Oracle 11g二-程序员宅基地
文章浏览阅读408次。 在ubuntu 8.04下安装Oracle 11g2008年05月22日 星期四 11:02oracle 11g 数据库虽然提供了linux x86的版本,但是支持的linux版本只有Red Hat,Novell and Solaris 这几个,debian 和 ubuntu 不在支持之列,所以在ubuntu下安装就相对麻烦一些,请照着下文的方法一步一步的安装,不
初一计算机知识点下册,初一英语下册语法知识点全汇总-程序员宅基地
文章浏览阅读166次。新东方在线中考网整理了《初一英语下册语法知识点全汇总》,供同学们参考。一. 情态动词can的用法can+动词原形,它不随主语的人称和数而变化。1. 含有can的肯定句:主语+can+谓语动词的原形+其他。2. 含有can的否定句:主语+can't+动词的原形+其他。3. 变一般疑问句时,把can提前:Can+主语+动词原形+其他? 肯定回答:Yes,主语+can。否定回答:No,主语+can't...._七年级下册计算机知识点
NX/UG二次开发—其他—UFUN函数调用Grip程序_uf调用grip-程序员宅基地
文章浏览阅读3k次。在平时开发中,可能会遇到UFUN函数没有的功能,比如创建PTP的加工程序(我目前没找到,哪位大神可以指点一下),可以使用Grip创建PTP,然后用UFUN函数UF_call_grip调用Grip程序。具体如下截图(左侧UFUN,右侧Grip程序):..._uf调用grip
Android RatingBar的基本使用和自定义样式,kotlin中文教程_ratingbar样式修改-程序员宅基地
文章浏览阅读156次。第一个:原生普通样式(随着主题不同,样式会变)第二个:原生普通样式-小icon第三个:自定义RatingBar 颜色第四个:自定义RatingBar DrawableRatingBar 各样式实现===============原生样式原生样式其实没什么好说的,使用系统提供的style 即可<RatingBarstyle="?android:attr/ratingBarStyleIndicator"android:layout_width=“wrap_cont.._ratingbar样式修改
OpenGL环境搭建:vs2017+glfw3.2.1+glad4.5_vs2017的opengl环境搭建(完整篇)-程序员宅基地
文章浏览阅读4.6k次,点赞6次,收藏11次。安装vs2017:参考vs2017下载和安装。安装cmake3.12.3:cmake是一个工程文件生成工具。用户可以使用预定义好的cmake脚本,根据自己的选择(像是Visual Studio, Code::Blocks, Eclipse)生成不同IDE的工程文件。可以从它官方网站的下载页上获取。这里我选择的是Win32安装程序,如图所示:然后就是运行安装程序进行安装就行。配置glfw3...._vs2017的opengl环境搭建(完整篇)
在linux-4.19.78中使用UBIFS_ubifs warning-程序员宅基地
文章浏览阅读976次。MLC NAND,UBIFS_ubifs warning
随便推点
计算机系统内存储器介绍,计算机系统的两种存储器形式介绍-程序员宅基地
文章浏览阅读2.2k次。计算机系统的两种存储器形式介绍时间:2016-1-6计算机系统的存储器一般应包括两个部分;一个是包含在计算机主机中的主存储器,简称内存,它直接和运算器,控制器及输入输出设备联系,容量小,但存取速度快,一般只存放那些急需要处理的数据或正在运行的程序;另一个是包含在外设中的外存储器,简称外存,它间接和运算器,控制器联系,存取速度虽然慢,但存储容量大,是用来存放大量暂时还不用的数据和程序,一旦要用时,就..._计算机存储器系统采用的是主辅结构,主存速度快、容量相对较小,用于 1 分 程序,外
西门子PLC的编程工具是什么?_西门子plc编程软件-程序员宅基地
文章浏览阅读5.6k次。1. STEP 7(Simatic Manager):STEP 7或者Simatic Manager是西门子PLC编程最常用的软件开发环境。4. STEP 7 MicroWin:STEP 7 MicroWn是一款专门针对微型PLC(S7-200系列PLC)的编程软件,是Simatic Manager的简化版。如果需要与PLC系统配合使用,则需要与PLC编程工具进行配合使用。除了上述软件之外,西门子还提供了一些配套软件和工具,如PLC模拟器、硬件调试工具等,以帮助PLC编程人员快速地进行调试和测试。_西门子plc编程软件
HashMap扩容_hashma扩容-程序员宅基地
文章浏览阅读36次。【代码】HashMap扩容。_hashma扩容
Eclipse maven项目中依赖包不全,如何重新加载?_maven资源加载不全,怎么重新加载-程序员宅基地
文章浏览阅读2.9k次。1mvn dependency:copy-dependencies2 项目右键 -> Maven -> Disable Maven Nature3 项目右键 -> Configure -> Convert to Maven Project_maven资源加载不全,怎么重新加载
mysql dml全称中文_MySQL语言分类——DML-程序员宅基地
文章浏览阅读527次。DMLDML的全称是Database management Language,数据库管理语言。主要包括以下操作:insert、delete、update、optimize。本篇对其逐一介绍INSERT数据库表插入数据的方式:1、insert的完整语法:(做项目的过程中将字段名全写上,这样比较容易看懂)单条记录插入语法:insert into table_name (column_name1,......_dml的全称是
【小工匠聊Modbus】04-调试工具-程序员宅基地
文章浏览阅读136次。可以参考: http://git.oschina.net/jrain-group/ 组织下的Java Modbus支持库Modbus-系列文章1、虚拟成对串口(1)下载虚拟串口软件VSPD(可在百度中搜索)image.png(2)打开软件,添加虚拟串口。在设备管理中,看到如下表示添加成功。..._最好用的 modebus调试工具