Ubuntu16.04下ROS的安装_ubuntu16.04安装ros-程序员宅基地
ROS的安装
ROS的安装
1.ROS安装
1.1 安装前的准备
1)ubuntu系统:
虚拟机或者双系统都可以,ubuntu 16.04官方镜像传送门: Ubuntu 16.04.7 LTS (Xenial Xerus)
2)更新软件源:
国内使用ubuntu自带的官方软件源会很慢,建议首先更新为国内镜像软件源,没有更新的可按如下方法更新,更新过了的直接跳到1.2节安装。
3)软件更新界面开启软件来源
ROS需要在ubuntu系统下使用,而且ROS版本和ubuntu系统版本一一对应,目前比较新的版本对应如下:
| ROS | Ubuntu |
|---|---|
| Noetic | 20.04 LTS |
| Melodic | 18.04 LTS |
| Kinetic | 16.04 LTS |
| indigo | 14.04 LTS |
这里假设已经装好了ubuntu系统,下面开始安装ROS,这里以ubuntu16.04安装Kinetic为例:
sudo gedit /etc/apt/sources.list
把原来的都内容都删了,替换为下面的国内镜像站:
阿里镜像站:
deb http://mirrors.aliyun.com/debian/ stretch main non-free contrib
deb-src http://mirrors.aliyun.com/debian/ stretch main non-free contrib
deb http://mirrors.aliyun.com/debian-security stretch/updates main
deb-src http://mirrors.aliyun.com/debian-security stretch/updates main
deb http://mirrors.aliyun.com/debian/ stretch-updates main non-free contrib
deb-src http://mirrors.aliyun.com/debian/ stretch-updates main non-free contrib
deb http://mirrors.aliyun.com/debian/ stretch-backports main non-free contrib
deb-src http://mirrors.aliyun.com/debian/ stretch-backports main non-free contrib
清华镜像站:
deb https://mirrors.tuna.tsinghua.edu.cn/debian/ stretch main contrib non-free
deb-src https://mirrors.tuna.tsinghua.edu.cn/debian/ stretch main contrib non-free
deb https://mirrors.tuna.tsinghua.edu.cn/debian/ stretch-updates main contrib non-free
deb-src https://mirrors.tuna.tsinghua.edu.cn/debian/ stretch-updates main contrib non-free
deb https://mirrors.tuna.tsinghua.edu.cn/debian/ stretch-backports main contrib non-free
deb-src https://mirrors.tuna.tsinghua.edu.cn/debian/ stretch-backports main contrib non-free
deb https://mirrors.tuna.tsinghua.edu.cn/debian-security/ stretch/updates main contrib non-free
deb-src https://mirrors.tuna.tsinghua.edu.cn/debian-security/ stretch/updates main contrib non-free
这个是我的电脑里的软件源,用的阿里的,其中也添加了docker的更新地址
deb-src http://archive.ubuntu.com/ubuntu xenial main restricted #Added by software-properties
deb http://mirrors.aliyun.com/ubuntu/ xenial main restricted
deb-src http://mirrors.aliyun.com/ubuntu/ xenial main restricted multiverse universe #Added by software-properties
deb http://mirrors.aliyun.com/ubuntu/ xenial-updates main restricted
deb-src http://mirrors.aliyun.com/ubuntu/ xenial-updates main restricted multiverse universe #Added by software-properties
deb http://mirrors.aliyun.com/ubuntu/ xenial universe
deb http://mirrors.aliyun.com/ubuntu/ xenial-updates universe
deb http://mirrors.aliyun.com/ubuntu/ xenial multiverse
deb http://mirrors.aliyun.com/ubuntu/ xenial-updates multiverse
deb http://mirrors.aliyun.com/ubuntu/ xenial-backports main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ xenial-backports main restricted universe multiverse #Added by software-properties
deb http://archive.canonical.com/ubuntu xenial partner
deb-src http://archive.canonical.com/ubuntu xenial partner
deb http://mirrors.aliyun.com/ubuntu/ xenial-security main restricted
deb-src http://mirrors.aliyun.com/ubuntu/ xenial-security main restricted multiverse universe #Added by software-properties
deb http://mirrors.aliyun.com/ubuntu/ xenial-security universe
deb http://mirrors.aliyun.com/ubuntu/ xenial-security multiverse
deb [arch=amd64] http://mirrors.aliyun.com/docker-ce/linux/ubuntu xenial stable
# deb-src [arch=amd64] http://mirrors.aliyun.com/docker-ce/linux/ubuntu xenial stable
替换完成后保存,保存后执行如下命令进行软件源更新
sudo apt-get update
另外ubuntu没有中文输入法,安装方法如下:
先打开语言支持软件,第一次打开需要安装

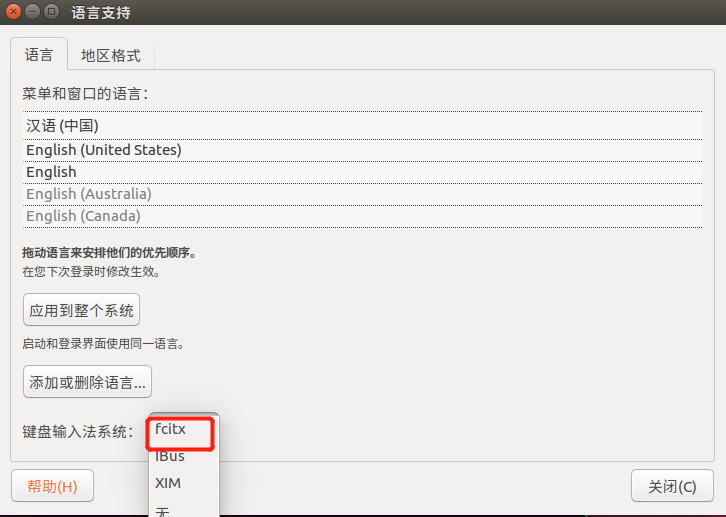
安装fcitx输入法系统:
sudo apt-get install fcitx fcitx-ui-* fcitx-sunpinyin fcitx-googlepinyin fcitx-pinyin fcitx-table-wubi fcitx-table-wbpy fcitx-table-cangjie fcitx-table* fcitx-frontend-gtk2 fcitx-frontend-gtk3 fcitx-config-gtk*
重启系统,然后在语言支持里的键盘输入法系统选择fcitx。
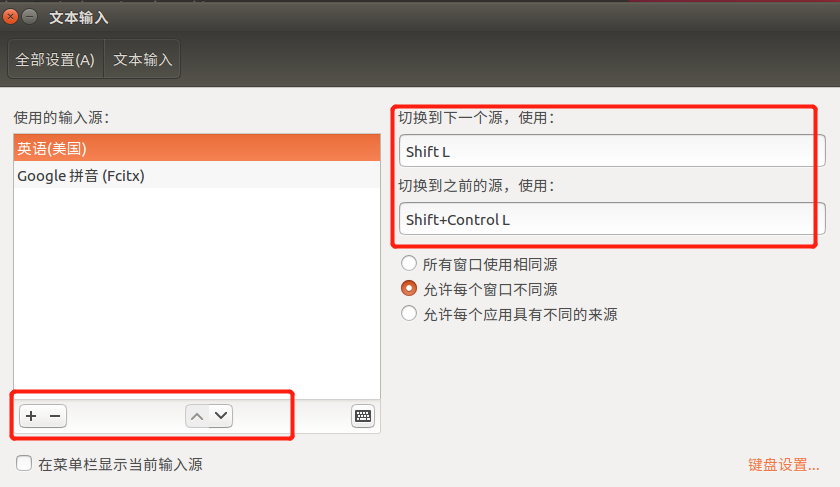
切换完后会有很多输入法,需要在文本输入里设置一下:

点击加减按钮可以增删输入法切换候选列表,点击上下移动按钮可以设置优先级,右边可以设置切换快捷键。
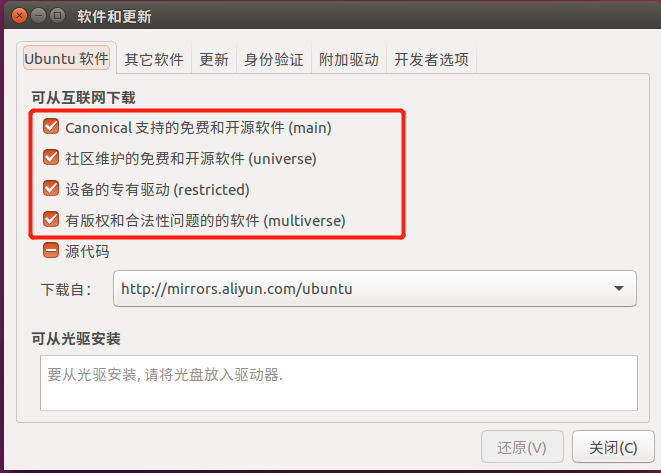
一般教程会让把软件中心这几个源都选上,我安装时发现默认都是选上的,如果不确定的话可以打开软件和更新界面,看如下四个选项是否都是选上的,没有的需要选上。
1.2 安装ROS
安装步骤一共四步:
第一步,添加ROS软件源到apt的更新源列表:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
第二步,添加软件密匙
sudo apt-key adv --keyserver hkp://pgp.mit.edu:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
添加后更新软件源
sudo apt-get update
第三步,通过apt安装ros
sudo apt-get install ros-kinetic-desktop-full
ros大致分为三个版本
| ROS版本 | 简称 | 简介 |
|---|---|---|
| ros-kinetic-desktop-full | 桌面完整版安装 | 这是最为推荐的一种安装版本,除了包含ROS的基础功能(核心功能包、构建工具和通信机制)外,还包含丰富的机器人通用函数库、功能包(2D/3D感知功能、机器人地图建模、自主导航等)以及工具(rviz可视化工具、gazebo仿真环境、rqt工具箱等)。命令为: |
| ros-kinetic-desktop | 桌面版安装 | 该版本是完整安装的精简版,去掉了机器人功能包和部分工具,仅包含ROS基础功能、机器人通用函数库、rqt工具箱和rviz可视化工具 |
| ros-kinetic-ros-base | 基础版安装 | 基础版精简了机器人通用函数库、功能包和工具,仅保留了没有任何GUI的基础功能(核心功能包、构建工具和通信机制)。因此该版本软件的规模最小,也是ROS需求的“最小系统”,非常适合直接安装在对性能和空间要求较高的控制器之上,为嵌入式系统使用ROS提供了可能。 |
其他ROS的功能包可以使用如下命令安装
sudo apt-get install ros-kinetic-PACKAGE
第四步,初始化ROS
sudo rosdep init
rosdep update
国内用户一般会在第四步失败,因为第四步需要访问raw.githubusercontent.com这个网站,一般都会报超时失败。
这里提供三种解决办法,第一种使用rosdepc工具,亲测有效。第二种使用代理,需要修改更新的python脚本,亲测有效。第三种是下载文件到本地进行更新,第四种是使用ROS国内源
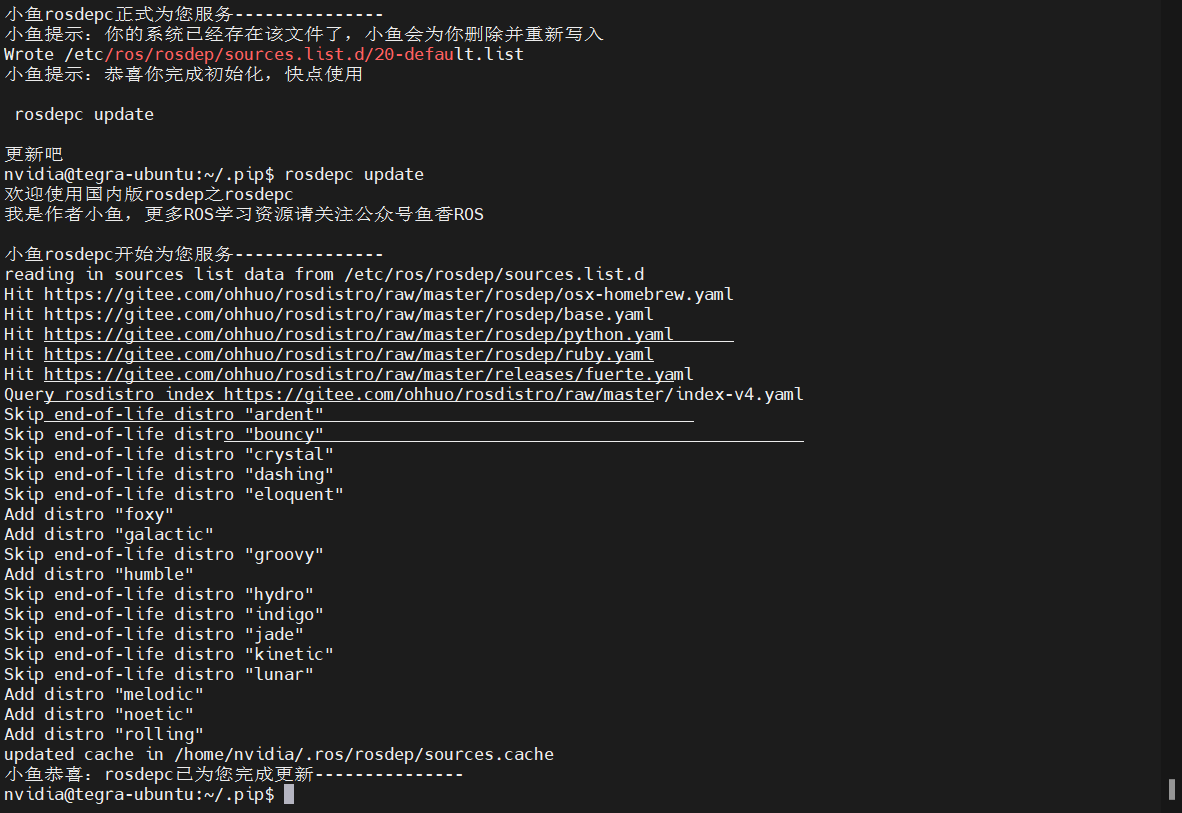
方法一:用rosdepc工具
rosdepc,这是国内大佬做的rosdep镜像,可以绕开连接不上服务器的困难过程。
先安装python3-pip工具
sudo apt install python3-pip
在安装了pip之后,需要对其进行换源,使用国内源能够更快下载文件
mkdir ~/.pip
cd ~/.pip
touch pip.conf
gedit ~/pip.conf
在pip.conf文件中写入
[global]
index-url = https://pypi.tuna.tsinghua.edu.cn/simple/
[install]
trusted-host = pypi.tuna.tsinghua.edu.cn
接下来安装rosdepc
sudo pip install rosdepc
sudo rosdepc init
rosdepc update
方法二:使用ghproxy.com代理
基本思想是在rosdep的若干个脚本文件中,把 https://ghproxy.com/ 添加到相应URL前面即可。
总结来说需要在以下6个文件修改如下几个地方
| 文件地址 | 行数 | 修改内容 |
|---|---|---|
| /usr/lib/python2.7/dist-packages/rosdep2/sources_list.py | 311 | 加入:url=“https://ghproxy.com/”+url |
| /usr/lib/python2.7/dist-packages/rosdistro/init.py | 68 | 修改DEFAULT_INDEX_URL为:DEFAULT_INDEX_URL = ‘https://ghproxy.com/https://raw.githubusercontent.com/ros/rosdistro/master/index-v4.yaml’ |
| /usr/lib/python2.7/dist-packages/rosdep2/gbpdistro_support.py | 36,204 | 36行:在原网站前添加“https://ghproxy.com/” 204行:gbpdistro_url = “https://ghproxy.com/” + gbpdistro_url |
| /usr/lib/python2.7/dist-packages/rosdep2/sources_list.py | 72 | 在原网站前添加“https://ghproxy.com/” |
| /usr/lib/python2.7/dist-packages/rosdep2/rep3.py | 39 | 在原网站前添加“https://ghproxy.com/” |
| /usr/lib/python2.7/dist-packages/rosdistro/manifest_provider/github.py | 68,119 | 在原网站前添加“https://ghproxy.com/” |
详细演示:
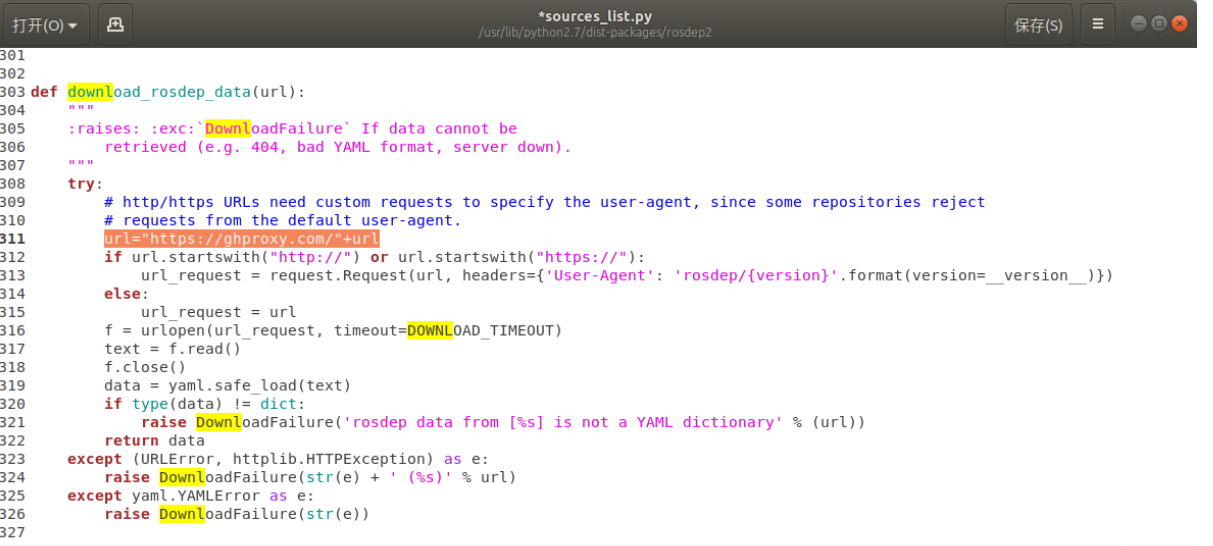
**1.修改rosdep下载资源的脚本文件:/usr/lib/python2.7/dist-packages/rosdep2/sources_list.py,把以下行添加到脚本中的download_rosdep_data()**函数中,以应用代理服务:
url="https://ghproxy.com/"+url
**2.**然后用同样的方法修改/usr/lib/python2.7/dist-packages/rosdistro/init.py里面的DEFAULT_INDEX_URL参数,如下:
DEFAULT_INDEX_URL = 'https://ghproxy.com/https://raw.githubusercontent.com/ros/rosdistro/master/index-v4.yaml'
**3.**修改以下4个文件中,同样的方法把“https://ghproxy.com/”添加到网址前:
/usr/lib/python2.7/dist-packages/rosdep2/gbpdistro_support.py 36行
/usr/lib/python2.7/dist-packages/rosdep2/sources_list.py 72行
/usr/lib/python2.7/dist-packages/rosdep2/rep3.py 39行
/usr/lib/python2.7/dist-packages/rosdistro/manifest_provider/github.py 68行 119行
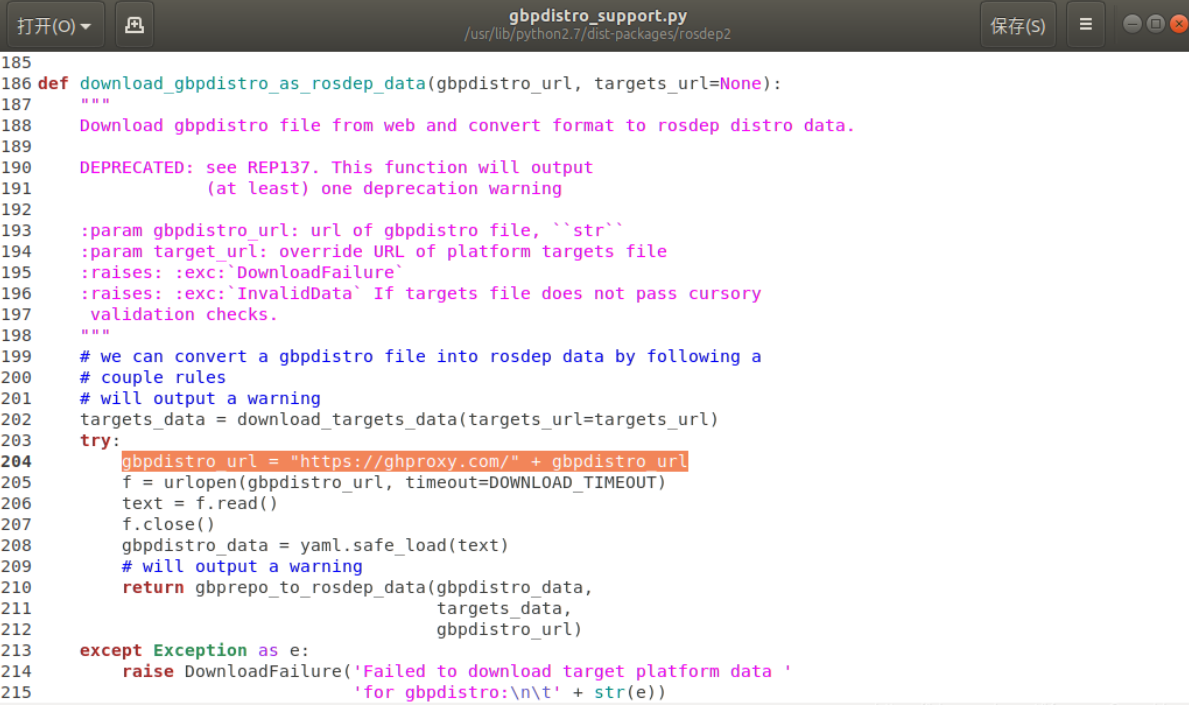
**4.**在 /usr/lib/python2.7/dist-packages/rosdep2/gbpdistro_support.py 的第204行添加如下代码:
gbpdistro_url = "https://ghproxy.com/" + gbpdistro_url
方法3,下载文件到本地进行更新
方法链接:
Ubuntu18.0装ROS踩坑记录_迪迦谁占了的博客-程序员宅基地
一定能解决ROS系统 rosdep update超时问题de简单方法_不加辣先生的博客-程序员宅基地_rosdep update
方法4,使用国内源
链接如下,我没有尝试成功,大家可以试一下
【Ubuntu 】Ubuntu 更换国内源—解决终端下载错误或速度慢的问题_Leslie___Cheung的博客-程序员宅基地_ubuntu安装国内源
2.ROS环境配置及使用
安装完ROS,需要将环境变量设置脚本路径放在默认环境激活脚本中
echo "source /opt/ros/kinetic/setup.sh" >> ~/.bashrc
source ~/.bashrc
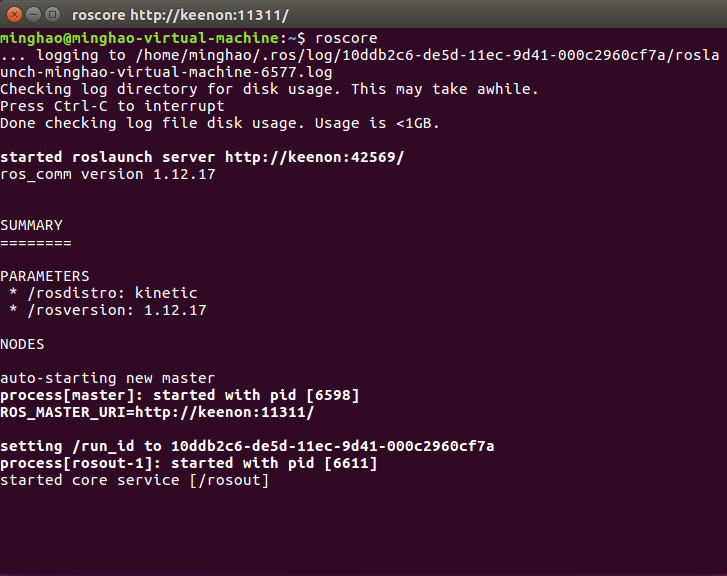
然后运行roscore,启动rosmaster
roscore
出现如下界面则表示ros安装完成,enjoy!
参考
rosdep update 超时失败2021最新解决方法_WGH无疆的博客-程序员宅基地_rosdep update 超时
智能推荐
Mineflayer简介——Minecraft机器人-程序员宅基地
文章浏览阅读4.3k次,点赞6次,收藏9次。简介Mineflayer是 PrismarineJS community 创建的开源项目.Mineflayer Github: https://github.com/PrismarineJS/mineflayerPrismarineJS Organization Github: https://github.com/PrismarineJS使用强大、稳定、高级 JavaScript API 创建 Minecraft机器人。我是在 YouTube 上偶然看到TheDudeFromCI的视频的,我这几_mineflayer
迟到的transformer encoder代码详解_transformerencoderlayer-程序员宅基地
文章浏览阅读6.9k次,点赞13次,收藏52次。前言与传统序列模型不同,transformer的创新点在于能够捕捉语义全局信息(同时通过position embedding考虑到了序列之间的位置关系)、能够并行化计算…想通过本文的代码层面的记录,让我和大家一眼就可以知道(或者记起)transformer模型的架构以及实现方法。但背后究竟是什么原理,本文没有深究。从“TransformerEncoder” 类说起这个类实现了transformer的encoder的所有功能:word_embedding(1) + position_embeddi_transformerencoderlayer
2017年工作总结-程序员宅基地
文章浏览阅读97次。 感谢一直以来,在身后,默默支持和拖后腿的她。---------朴素的分割线-------------- 今年的年终终结,不得不提下去年的这个时候。去年的这个时候,已经下定决心,年后辞职去深圳。过年在家,晚上,还蹲着田边,蹭着邻居家的WiFi,在慕课网上看mongodb 的视频。 那个时候的我,还是一个很菜的Java程序员,除了Java基础比较扎实,喜欢捣鼓一些自认为可以提高工作...
数据库死锁及解决死锁问题_数据库怎么重现死锁-程序员宅基地
文章浏览阅读2k次。所谓死锁: 是指两个或两个以上的进程在执行过程中,因争夺资源而造成的一种互相等待的现象,若无外力作用,它们都将无法推进下去.此时称系统处于死锁状态或系统产生了死锁,这些永远在互相等待的进程称为死锁进程.由于资源占用是互斥的,当某个进程提出申请资源后,使得有关进程在无外力协助下,永远分配不到必需的资源而无法继续运行,这就产生了一种特殊现象死锁。 一种情形,此时执行程序中两个或多个线程发生永久堵塞(等_数据库怎么重现死锁
频率分析破解单表代换密码_用频率统计方法,试译下面用单表置换加密的一段密文: sic gcbspna xpmhacq jb g-程序员宅基地
文章浏览阅读1.2w次,点赞7次,收藏60次。频率分析破解原理:在任何一种书面语言中,不同的字母或字母组合出现的频率各不相同。而且,对于以这种语言写的任意一段文本,都具有大致相同的特征字母分布。比如,在英语中,字母E出现的频率很高,而X出现的较少。类似地,ST、NG、TH以及QU等双字母组合出现的频率非常高,NZ、QJ组合则极少。英语中出现频率最高的12个字母可以简记为“ETAOIN SHRDLU”。简单替换密码的频率分析,在一个简单..._用频率统计方法,试译下面用单表置换加密的一段密文: sic gcbspna xpmhacq jb gpyx
回声状态网络(ESN)原理详解(附源码实现)-程序员宅基地
文章浏览阅读3.8w次,点赞37次,收藏232次。最近在看回声状态网络(Echo State Network)的内容,因为很少搜到关于Echo State Network的快速入门讲解,所以打算写一下ESN的基本原理。1、概念回声状态网络作为一种新型的递归神经网络(如上图),也由输入层、隐藏层(即储备池)、输出层组成。其将隐藏层设计成一个具有很多神经元组成的稀疏网络,通过调整网络内部权值的特性达到记忆数据的功能,其内部的动态储备池(..._回声状态网络
随便推点
一次使用PowerDesigner导出Mysql数据库文件的过程_powerdesigner导出mysql语句-程序员宅基地
文章浏览阅读2.9k次,点赞3次,收藏6次。1、补充数据库的注释信息--获取数据库的所有表信息,补充注释信息,根据实际情况处理SELECT * from INFORMATION_SCHEMA.TABLES Where table_schema = '数据库名称' AND (TABLE_COMMENT IS NULL OR TABLE_COMMENT = '')--选择需要导出的表,根据实际业务处理AND table_name IN (表名);--获取数据库的所有字段信息,补充注释,根据实际情况处理SELECT C.TABLE__powerdesigner导出mysql语句
qcc304x笔记之tone配置(七)_高通qcc tone声定义-程序员宅基地
文章浏览阅读1k次。代码逻辑分析/*处理来自外部的系统消息和内部的消息*/uiTones_HandleMessage /*从earbud_ui_tones_table匹配当前事件是否设置了提示音*/ uiTones_GetToneIndexFromMappingTable /*tone播放任务调度*/ uiTones_SchedulePlay uiTones_PlayTone appKymeraTonePlay /*通知对端同步播放tones*/Ui_RaiseUiEvent(ui_indica_高通qcc tone声定义
Supervisor使用详解_supervisor stderr_logfile-程序员宅基地
文章浏览阅读574次。一、supervisor简介Supervisor是用Python开发的一套通用的进程管理程序,能将一个普通的命令行进程变为后台daemon,并监控进程状态,异常退出时能自动重启。它是通过fork/exec的方式把这些被管理的进程当作supervisor的子进程来启动,这样只要在supervisor的配置文件中,把要管理的进程的可执行文件的路径写进去即可。也实现当子进程挂掉的时候,父进程可以准确获取子进程挂掉的信息的,可以选择是否自己启动和报警。supervisor还提供了一个功能,可以为supervis_supervisor stderr_logfile
异构网络中基于元图的推荐——FMG-程序员宅基地
文章浏览阅读2.2k次,点赞2次,收藏15次。主要参考论文:《Meta-Graph Based Recommendation Fusion over Heterogeneous Information Networks》概述基于异构信息网络的推荐系统面临两个问题:1.如何表示高阶推荐语义;2.如何融合异构信息用于推荐。针对第一个问题,本文采用了元图(和元路径)来表示高阶推荐语义;对于第二个问题,本文先用标准矩阵分解技术(MF)分解每个元图(元路径)得到的相似度矩阵,生成用户和物品的隐式表征,对不同元图(元路径)得到的表征使用带有group las_基于元图的
Android WebView设置cookie_android webview cookie httponly-程序员宅基地
文章浏览阅读2k次。场景: Android原生和H5的混合开发中,登录维护在原生,某些详情页面嵌套Webview。 问题:原生登录之后将cookie存起来,在 WebView.loadUrl("");之前设置cookie,针对每个项目cookie它的格式都不相同。 如果你不知道你们url的cookie格式的话,你可以将url复制到pc端的浏览器中,打开开发者模式如..._android webview cookie httponly
NLP实战:Pytorch实现6大经典深度学习中文短文本分类-bert+ERNIE+bert_CNN+bert_RNN+bert_RCNN+bert_DPCNN_pytorch nlp-程序员宅基地
文章浏览阅读4.5k次,点赞10次,收藏62次。本文基于PyTorch框架,实现了6种经典的深度学习中文文本分类模型,这些模型包括基于Transformer模型的Bert和ERNIE,以及结合卷积神经网络、循环神经网络和深度金字塔卷积神经网络的bert_CNN、bert_RNN、bert_RCNN和bert_DPCNN,并对各模型进行了训练与结果比较。_pytorch nlp