动态矩阵控制(DMC)的简单理解及其示例_dmc控制-程序员宅基地
技术标签: matlab
前言
在模型预测控制的课程当中接触到了动态矩阵控制(DMC)算法,虽然不会在以后继续深入,但它控制、预测和校正的思想还是可圈可点的。本文将简要概述DMC的基本原理和控制流程,尽量做到省去复杂的数学公式而理解DMC。但由于接触不深且实力有限,本文的表述可能会有一些不准确或者错误,因此仅供参考,同时欢迎大家指正。
DMC的基本思想
动态矩阵控制(DMC)是在上世纪80年代提出的一种典型的模型预测控制(MPC)方法。虽然在今天它已经不再是MPC的研究关注点,但其思想却非常值得借鉴,因此几乎所有的模型预测控制教材都把DMC作为一部分来讲解。概括来说,DMC的特点主要有:
- 控制与系统的数学模型无关,仅需获取系统的阶跃响应序列,方法适用于稳定的系统;
- 系统的动态特性中具有纯滞后或非最小相位特性都不影响算法的直接应用。
也就是说,使用DMC无需知道被控对象的数学模型,只需要获取被控对象的阶跃响应序列即可实现控制效果,但需要被控对象是渐进稳定的。同时,即使被控对象有一定的纯滞后特性,或者是非最小相位的(对象传递函数的零点存在于S域右半平面)都不影响DMC的使用。从上面的特性可以,DMC的应用范围是比较广泛的。接下来就简单地谈一谈DMC的三要素,既预测模型、滚动优化和反馈校正。
预测模型
DMC的使用需要建立在预测模型的基础上。简单来说就是,DMC控制器希望通过已有信息构造未来若干时刻的系统输入并预测系统的输出。那么要如何实现呢?可行的方案之一是使用系统的阶跃响应序列。由线性时不变(LTI)系统具备的比例叠加性质可知,在已知从0开始的系统N个采样点上的阶跃响应序列的情况下,系统在k时刻对未来P个时刻的输出预测 Y ( k ) Y(k) Y(k)可由系统在k时刻的输出预测初值 Y 0 ( k ) Y_0(k) Y0(k)与M个连续的输入增量序列 Δ U ( k ) \Delta U(k) ΔU(k)及由阶跃响应序列组成的动态矩阵A计算得到,其计算表达式如下:
Y ( k ) = Y 0 ( k ) + A Δ U ( k ) Y(k)=Y_0(k)+A\Delta U(k) Y(k)=Y0(k)+AΔU(k)
其中N称为截断步长,P称为预测步长,M称为控制步长,它们三者之间的大小关系一般为N > P > M > 0。动态矩阵A由阶跃响应序列 [a(0), a(1), a(2) … a(N-1)] 构造得到,其具体构成如下:
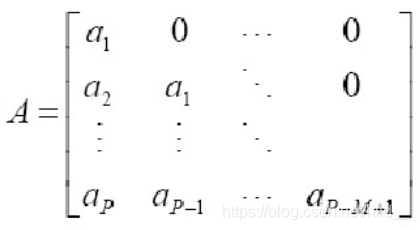
DMC控制的期望效果是:在M个连续的控制输入序列作用下,系统的输出在P个时刻以内稳定在参考输出值。
滚动优化
在理想状态下,DMC控制器的确可能如期望的那样工作:仅需一次确定控制输入序列,然后静待系统的输出稳定在参考输出值,期间什么也不用做。然而在实际的系统中,由于系统扰动的存在使得这样理想的控制毫无可能。因此实际的做法是,在每个时刻k,控制器都会确定从该时刻起的M个控制增量序列用于预测控制,滚动优化也因此而得名。那么DMC又是如何确定每个时刻的控制增量的呢?答案便是采用最优控制的求解方法得到。模型预测控制与最优控制可以说是紧密相连的。在每次滚动优化时,都可以看作是根据当前已知信息确定未来控制增量的最优求解问题。而最优控制的基本思想在于:确定目标函数,并根据约束条件进行求解。在DMC的简单应用中一般是在无约束的条件下求解,而DMC控制增量求解的目标函数通常定义为如下:
m i n J = [ r p ( k ) − ( y p 0 ( k ) + A Δ u M ( k ) ) ] T Q [ r p ( k ) − ( y p 0 ( k ) + A Δ u M ( k ) ) ] + Δ u M T ( k ) R Δ u M ( k ) minJ=[r_p(k)-(y_{p0}(k)+A\Delta u_M(k))]^{T}Q[r_p(k)-(y_{p0}(k)+A\Delta u_M(k))]+\Delta u^{T}_M(k)R\Delta u_M(k) minJ=[rp(k)−(yp0(k)+AΔuM(k))]TQ[rp(k)−(yp0(k)+AΔuM(k))]+ΔuMT(k)RΔuM(k)
目标函数可以解释为:一方面我们希望系统在控制增量的作用下尽可能趋近于参考输出,一方面又希望控制增量在控制达到稳定后可以趋近于0,避免对执行机构造成不利的影响。可以看出,定义的目标函数是典型的二次型形式,可通过简单的二次规划或者变分法求解得到k时刻下的最优控制增量 Δ u M ∗ ( k ) \Delta u^{*}_M(k) ΔuM∗(k)如下:
Δ u M ∗ ( k ) = ( A T Q A + R ) − 1 A T Q [ r p ( k ) − y p 0 ( k ) ] \Delta u^{*}_M(k)=(A^{T}QA+R)^{-1}A^{T}Q[r_p(k)-y_{p0}(k)] ΔuM∗(k)=(ATQA+R)−1ATQ[rp(k)−yp0(k)]
其中 y p 0 ( k ) y_{p0}(k) yp0(k)为模型预测初值的前P个元素构成的序列。上式求解得到的 Δ u M ∗ ( k ) \Delta u^{*}_M(k) ΔuM∗(k)为一个向量,然而实际上DMC仅使用其中第一个元素用于预测控制,这也是滚动优化的特点。
反馈校正
在预测模型和滚动优化的基础上,DMC控制器已经可以实现开环控制的效果。理想情况下,既排除模型失配,环境干扰等因素,开环控制器可以较好地完成控制工作。但那也是在理想环境下,在真实环境中系统工作时一定会伴随着不确定的系统扰动,这时候应该做的便是将开环控制转为闭环控制以提升系统的抗扰动能力,而DMC也是这样做的。DMC在运行时会采集实时信息对预测模型进行校正,之后再进行新的优化,这个过程便是反馈校正。由于它是在线修改预测模型,因此也可以看作是一种在线辨识的方法。
反馈校正的思路在于:在k时刻时,将计算得到的最优控制增量 Δ u ( k ) \Delta u(k) Δu(k)作用于模型,可得到未来N个时刻的模型输出预测记为 y N 1 ( k ) y_{N1}(k) yN1(k),取预测输出值的第一个元素,既下一时刻的预测输出值 y 1 ( k + 1 ∣ k ) y_1(k+1|k) y1(k+1∣k)与下一时刻被控对象的实际输出值 y ( k + 1 ) y(k+1) y(k+1)进行比较,得到预测的误差 e ( k + 1 ) e(k+1) e(k+1)如下:
e ( k + 1 ) = y ( k + 1 ) − y 1 ( k + 1 ∣ k ) e(k+1)=y(k+1)-y_1(k+1|k) e(k+1)=y(k+1)−y1(k+1∣k)
接着对误差 e ( k + 1 ) e(k+1) e(k+1)加权得到加权误差序列用于修正预测模型,其计算表达式如下:
y c o r ( k + 1 ) = y N 1 ( k ) + h e ( k + 1 ) y_{cor}(k+1)=y_{N1}(k)+he(k+1) ycor(k+1)=yN1(k)+he(k+1)
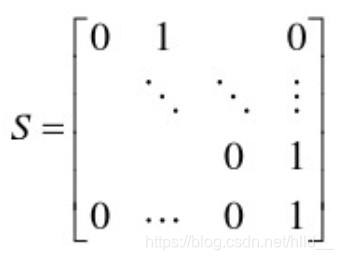
其中 y c o r ( k + 1 ) y_{cor}(k+1) ycor(k+1)为下一时刻修正后的模型输出预测值;h为N维误差加权序列。此时还需对 y c o r ( k + 1 ) y_{cor}(k+1) ycor(k+1)进行一步转移操作最终得到 y N 0 ( k + 1 ) y_{N0}(k+1) yN0(k+1)作为下一时刻的模型预测初值,其计算表达式如下:
y N 0 ( k + 1 ) = S y c o r ( k + 1 ) y_{N0}(k+1)=Sy_{cor}(k+1) yN0(k+1)=Sycor(k+1)
其中S矩阵的构成如下:
DMC的控制流程
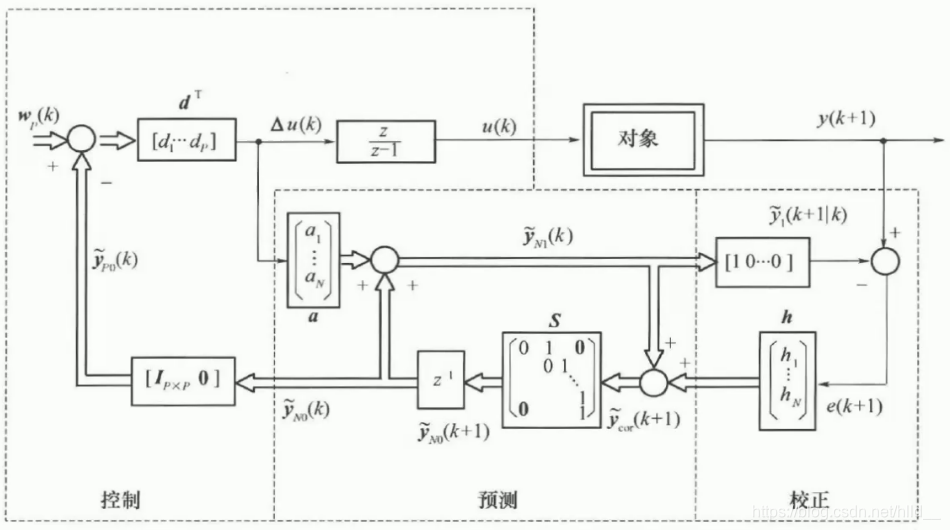
在介绍完DMC的基本思想后,即可简单地介绍DMC的控制流程。整个控制过程简单来说就是:在k时刻,首先将k-1时刻的控制输入 u ( k − 1 ) u(k-1) u(k−1)作用于被控对象并测量k时刻被控对象的输出值 y ( k ) y(k) y(k),接着取k时刻的模型预测序列 y N 1 ( k − 1 ) y_{N1}(k-1) yN1(k−1)的第一个元素既 y 1 ( k ∣ k − 1 ) y_1(k|k-1) y1(k∣k−1)与 y ( k ) y(k) y(k)进行比较得到预测误差 e ( k ) e(k) e(k), e ( k ) e(k) e(k)经过h向量加权与 y N 1 ( k − 1 ) y_{N1}(k-1) yN1(k−1)相加后进行一步转移得到k时刻的模型预测初值 y N 0 ( k ) y_{N0}(k) yN0(k),取它的前P个元素构成 y P 0 ( k − 1 ) y_{P0}(k-1) yP0(k−1)与参考轨迹 w P ( k ) w_P(k) wP(k)进行比较,利用前面滚动优化中提到的最优解方程求出k时刻的控制输入增量 Δ u ( k ) \Delta u(k) Δu(k),最后累加得到 u ( k ) = u ( k − 1 ) + Δ u ( k ) u(k)=u(k-1)+\Delta u(k) u(k)=u(k−1)+Δu(k),同时将 Δ u ( k ) \Delta u(k) Δu(k)作用于预测模型,得到k时刻的模型预测值 y N 1 ( k ) y_{N1}(k) yN1(k)。DMC的控制流程图如下:
模型预测控制教材上的DMC的系统控制框图如下所示:
DMC简单示例
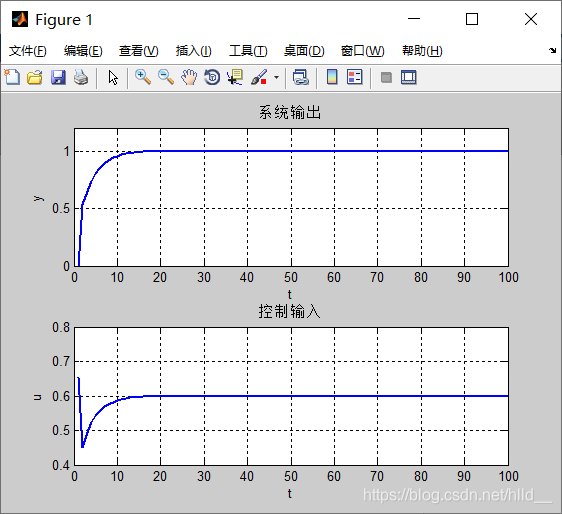
在理解DMC的基本思想和大概的控制流程后,最后附上一个简单的例子帮助理解。本例中被控对象的传递函数为:
G ( s ) = s + 5 s 2 + 5 s + 3 G(s)=\frac{s+5}{s^2+5s+3} G(s)=s2+5s+3s+5
系统输出的参考轨迹设定为阶跃函数,既取定值1的序列。DMC控制的参数取N=20,P=10,M=1,采样周期Ts=1。具体的程序如下:
clc,close,clear;
% 被控对象传递函数
num=[1 5];
den=[1 5 3];
g=tf(num,den);
steps=100; % 仿真步数
ts=1; % 采样周期
p=10; % 预测步长
m=1; % 控制步长
n=20; % 截断步长
% 离散状态空间方程
[as,bs,cs,ds]=tf2ss(num,den);
[ad,bd]=c2d(as,bs,ts);
xs0=[0 0]';
% 传递函数阶跃响应
[a0,t]=step(g,0:ts:(n-1)*ts);
% 构造动态矩阵
a=zeros(p,m);
a(:,1)=a0(1:p);
for i=1:p
for j=2:m
if i>=j
a(i,j)=a(i-1,j-1);
end
end
end
% 离线计算最优解系数d
q=eye(p);
r=0*eye(m);
c=zeros(m,1);
c(1)=1;
d=(a'*q*a+r)^-1*a'*q;
d=c'*d;
% 构造误差加权向量及转移矩阵
h=0.5*ones(n,1);
h(1)=1;
s=zeros(n,n);
for i=1:n-1
s(i,i+1)=1;
end
s(n,n)=1;
yr=ones(p,1); % 参考轨迹
y0=zeros(n,1); % 模型预测
y=zeros(steps,1); % 实际输出
u=zeros(steps,1); % 系统控制量
% 首步计算
xs1=ad*xs0;
y(1)=cs*xs1;
xs0=xs1;
ycor=y0+h*(y(1)-y0(1));
y0=s*ycor;
du=d*(yr-y0(1:p));
y0=y0+a0*du;
u(1)=du;
% 滚动优化
for k=2:steps
xs1=ad*xs0+bd*u(k-1);
y(k)=cs*xs1+ds*u(k-1);
xs0=xs1;
ycor=y0+h*(y(k)-y0(1));
y0=s*ycor;
du=d*(yr-y0(1:p));
y0=y0+a0*du;
u(k)=u(k-1)+du;
end
% 绘制图形
figure(1);
subplot(211);
plot(y,'linewidth',2);
title('系统输出');
xlabel('t');
ylabel('y');
ylim([0 1.2])
grid on;
subplot(212);
plot(u,'linewidth',2);
title('控制输入');
xlabel('t');
ylabel('u');
grid on;
DMC仿真结果绘制的曲线如下:
结束语
花了一点时间简单把课程涉及到的动态矩阵控制算法进行了介绍,以起到加深对方法理解的作用。但由于水平有限,表述不怎么准确,因此本文仅供参考(毕竟也没想花太多时间在这上面)。实际上DMC已经不是模型预测控制领域的关注点。作为一种典型的方法,它的思想值得借鉴,但确实不具备太大的实用性,在一些应用场景中甚至不及PID的控制性能。它的亮点在于引入预测控制后控制的鲁棒性有所提升,但同时也伴随着计算量过大的缺陷。总地来说,DMC的思想是值得借鉴的,但也仅此而已。如果需要更好地学习模型预测控制,那理解DMC只是第一步或者根本不需要这一步。
智能推荐
攻防世界_难度8_happy_puzzle_攻防世界困难模式攻略图文-程序员宅基地
文章浏览阅读645次。这个肯定是末尾的IDAT了,因为IDAT必须要满了才会开始一下个IDAT,这个明显就是末尾的IDAT了。,对应下面的create_head()代码。,对应下面的create_tail()代码。不要考虑爆破,我已经试了一下,太多情况了。题目来源:UNCTF。_攻防世界困难模式攻略图文
达梦数据库的导出(备份)、导入_达梦数据库导入导出-程序员宅基地
文章浏览阅读2.9k次,点赞3次,收藏10次。偶尔会用到,记录、分享。1. 数据库导出1.1 切换到dmdba用户su - dmdba1.2 进入达梦数据库安装路径的bin目录,执行导库操作 导出语句:./dexp cwy_init/[email protected]:5236 file=cwy_init.dmp log=cwy_init_exp.log 注释: cwy_init/init_123..._达梦数据库导入导出
js引入kindeditor富文本编辑器的使用_kindeditor.js-程序员宅基地
文章浏览阅读1.9k次。1. 在官网上下载KindEditor文件,可以删掉不需要要到的jsp,asp,asp.net和php文件夹。接着把文件夹放到项目文件目录下。2. 修改html文件,在页面引入js文件:<script type="text/javascript" src="./kindeditor/kindeditor-all.js"></script><script type="text/javascript" src="./kindeditor/lang/zh-CN.js"_kindeditor.js
STM32学习过程记录11——基于STM32G431CBU6硬件SPI+DMA的高效WS2812B控制方法-程序员宅基地
文章浏览阅读2.3k次,点赞6次,收藏14次。SPI的详情简介不必赘述。假设我们通过SPI发送0xAA,我们的数据线就会变为10101010,通过修改不同的内容,即可修改SPI中0和1的持续时间。比如0xF0即为前半周期为高电平,后半周期为低电平的状态。在SPI的通信模式中,CPHA配置会影响该实验,下图展示了不同采样位置的SPI时序图[1]。CPOL = 0,CPHA = 1:CLK空闲状态 = 低电平,数据在下降沿采样,并在上升沿移出CPOL = 0,CPHA = 0:CLK空闲状态 = 低电平,数据在上升沿采样,并在下降沿移出。_stm32g431cbu6
计算机网络-数据链路层_接收方收到链路层数据后,使用crc检验后,余数为0,说明链路层的传输时可靠传输-程序员宅基地
文章浏览阅读1.2k次,点赞2次,收藏8次。数据链路层习题自测问题1.数据链路(即逻辑链路)与链路(即物理链路)有何区别?“电路接通了”与”数据链路接通了”的区别何在?2.数据链路层中的链路控制包括哪些功能?试讨论数据链路层做成可靠的链路层有哪些优点和缺点。3.网络适配器的作用是什么?网络适配器工作在哪一层?4.数据链路层的三个基本问题(帧定界、透明传输和差错检测)为什么都必须加以解决?5.如果在数据链路层不进行帧定界,会发生什么问题?6.PPP协议的主要特点是什么?为什么PPP不使用帧的编号?PPP适用于什么情况?为什么PPP协议不_接收方收到链路层数据后,使用crc检验后,余数为0,说明链路层的传输时可靠传输
软件测试工程师移民加拿大_无证移民,未受过软件工程师的教育(第1部分)-程序员宅基地
文章浏览阅读587次。软件测试工程师移民加拿大 无证移民,未受过软件工程师的教育(第1部分) (Undocumented Immigrant With No Education to Software Engineer(Part 1))Before I start, I want you to please bear with me on the way I write, I have very little gen...
随便推点
Thinkpad X250 secure boot failed 启动失败问题解决_安装完系统提示secureboot failure-程序员宅基地
文章浏览阅读304次。Thinkpad X250笔记本电脑,装的是FreeBSD,进入BIOS修改虚拟化配置(其后可能是误设置了安全开机),保存退出后系统无法启动,显示:secure boot failed ,把自己惊出一身冷汗,因为这台笔记本刚好还没开始做备份.....根据错误提示,到bios里面去找相关配置,在Security里面找到了Secure Boot选项,发现果然被设置为Enabled,将其修改为Disabled ,再开机,终于正常启动了。_安装完系统提示secureboot failure
C++如何做字符串分割(5种方法)_c++ 字符串分割-程序员宅基地
文章浏览阅读10w+次,点赞93次,收藏352次。1、用strtok函数进行字符串分割原型: char *strtok(char *str, const char *delim);功能:分解字符串为一组字符串。参数说明:str为要分解的字符串,delim为分隔符字符串。返回值:从str开头开始的一个个被分割的串。当没有被分割的串时则返回NULL。其它:strtok函数线程不安全,可以使用strtok_r替代。示例://借助strtok实现split#include <string.h>#include <stdio.h&_c++ 字符串分割
2013第四届蓝桥杯 C/C++本科A组 真题答案解析_2013年第四届c a组蓝桥杯省赛真题解答-程序员宅基地
文章浏览阅读2.3k次。1 .高斯日记 大数学家高斯有个好习惯:无论如何都要记日记。他的日记有个与众不同的地方,他从不注明年月日,而是用一个整数代替,比如:4210后来人们知道,那个整数就是日期,它表示那一天是高斯出生后的第几天。这或许也是个好习惯,它时时刻刻提醒着主人:日子又过去一天,还有多少时光可以用于浪费呢?高斯出生于:1777年4月30日。在高斯发现的一个重要定理的日记_2013年第四届c a组蓝桥杯省赛真题解答
基于供需算法优化的核极限学习机(KELM)分类算法-程序员宅基地
文章浏览阅读851次,点赞17次,收藏22次。摘要:本文利用供需算法对核极限学习机(KELM)进行优化,并用于分类。
metasploitable2渗透测试_metasploitable2怎么进入-程序员宅基地
文章浏览阅读1.1k次。一、系统弱密码登录1、在kali上执行命令行telnet 192.168.26.1292、Login和password都输入msfadmin3、登录成功,进入系统4、测试如下:二、MySQL弱密码登录:1、在kali上执行mysql –h 192.168.26.129 –u root2、登录成功,进入MySQL系统3、测试效果:三、PostgreSQL弱密码登录1、在Kali上执行psql -h 192.168.26.129 –U post..._metasploitable2怎么进入
Python学习之路:从入门到精通的指南_python人工智能开发从入门到精通pdf-程序员宅基地
文章浏览阅读257次。本文将为初学者提供Python学习的详细指南,从Python的历史、基础语法和数据类型到面向对象编程、模块和库的使用。通过本文,您将能够掌握Python编程的核心概念,为今后的编程学习和实践打下坚实基础。_python人工智能开发从入门到精通pdf