XTDRONE:ego_planner三维运动规划_reboundreplan-程序员宅基地
ros常用消息类型:
https://blog.csdn.net/xhtchina/article/details/119707553

iris_0_ego_transfer话题在~/XTDrone/motion_planning/3d/ego_transfer.py 被转化成iris_0/camera_pose
一、ego_planner功能包
1. ego_planner_node.cpp
注册ROS节点,实例化EGOReplanFSM类对象并进行初始化,程序入口
2. ego_replan_fsm.cpp
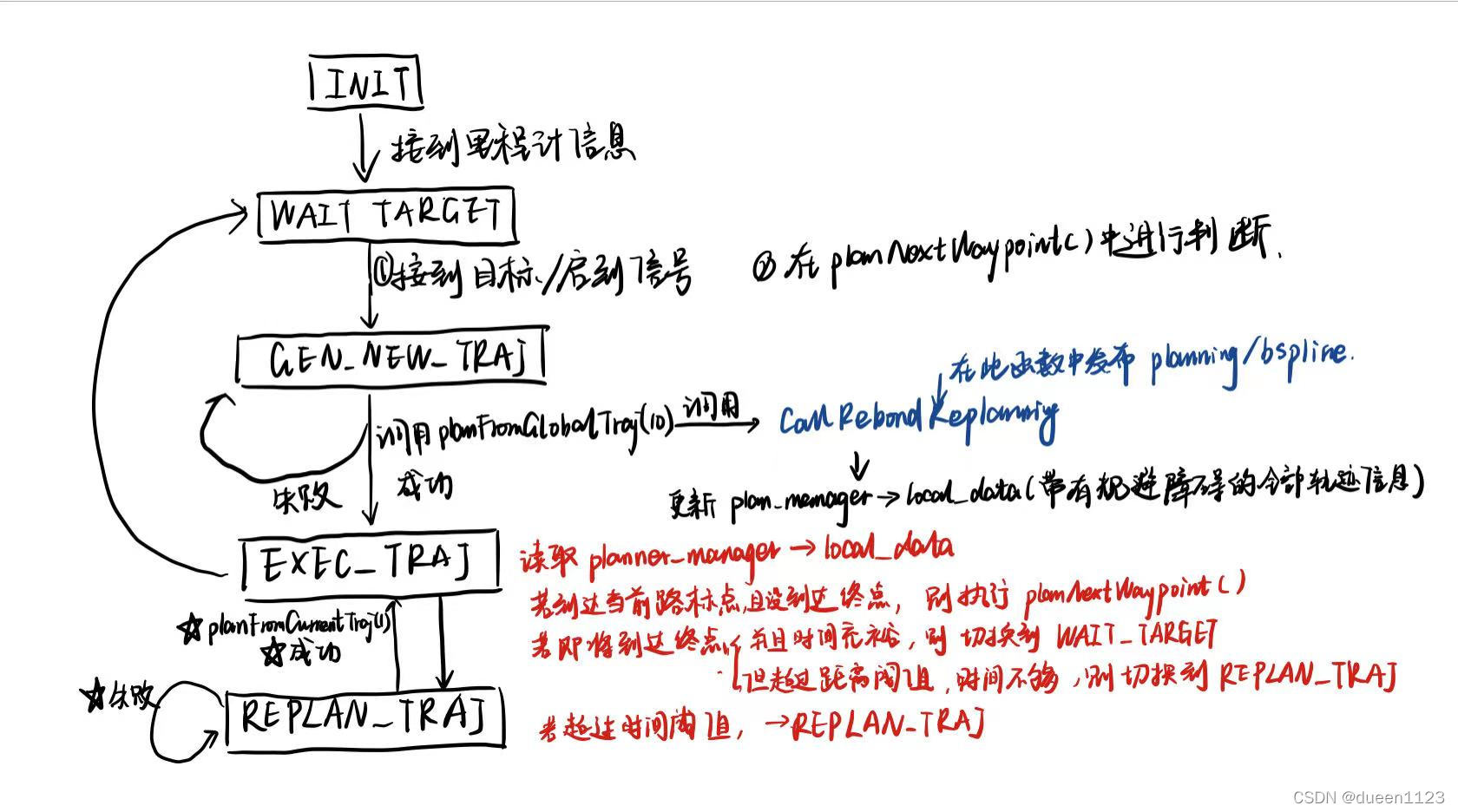
ExecFSMCallback()
这个函数的触发时间是每0.01秒。首先,每1秒打印一次当前执行状态。然后,根据执行状态变量 exec_state_进入switch循环。
如果状态是INIT(初始化),则判断有没有收到odometry 和 plan的 ttrigger是否被触发。 have_odom 和 trigger 这两个bool变量分别在odometryCallback()和waypointCallback()这两个消息订阅的回调函数中被改变。如果都通过,改变当前状态为WAIT_TARGET,并跳出当前循环。
如果状态是GEN_NEW_TRAJ(生成轨迹),则调用 planFromGlobalTraj() 函数进行规划。成功则改变执行状态为EXEC_TRAJ,执行 publishSwarmTrajs();失败则改变执行状态为GEN_NEW_TRAJ。这里我们来看 planFromGlobalTraj 函数。如果规划成功的话,就通过Bspline_pub把相应的B样条轨迹发布出去,否则返回FALSE
如果状态为REPLAN_TRAJ(重新规划),则利用当前的位置,速度,状态,进行 planFromCurrentTraj() 重规划,如果成功,则将执行状态更改为EXEC_TRAJ;否则将执行状态更改为REPLAN_TRAJ
如果状态为EXEC_TRAJ(执行轨迹),则判断是否需要进行重规划。如果没有达到end pointt,如果当前与终点距离 < 不需要重规划的阈值,则执行下一个路标点;如果当前时间距离起始时间已经超过当前执行轨迹的时长,则将have_target置于false,将执行状态变为WAIT_TARGET;反之,则进入重规划阶段REPLAN_TRAJ
CheckCollisionCallback()
判断目标点是否有障碍物 或者 是轨迹执行过程中是否有障碍物的回调函数
先判断轨迹中是否有障碍物,如果有障碍物,即occ为真,如果可以成功执行 planFromCurrentTraj(),即轨迹规划成功,则状态转为EXEC_TRAJ;如果轨迹规划不成功并且时间允许,则状态转为REPLAN_TRAJ;否则停止
(如果目标点有障碍物,就在目标点周围通过离散的半径及角度循环来寻找新的安全的目标点。如果找到了,就直接改变状态进入REPLAN_TRAJ;如果目标点周围没有障碍物且目前状态是EXEX_TRAJ,则利用planner_manager的 checkTrajCollision 函数进行轨迹检查,如果轨迹不发生碰撞,则无事发生,如果轨迹碰撞,则状态变为REPLAN_TRAJ,进行重规划)
PlanFromGlobalTraj()
传入时间,判断是否能生成全局轨迹,调用callReboundReplan()函数中的planner_manager_->reboundReplan()
PlanFromCurrentTraj()
判断是否能生成当前轨迹?调用callReboundReplan()函数中的planner_manager_->reboundReplan()
3. planner_manager.cpp
PlanGlobalTraj( )
在planner_manager.cpp中,检查路径规划是否成功
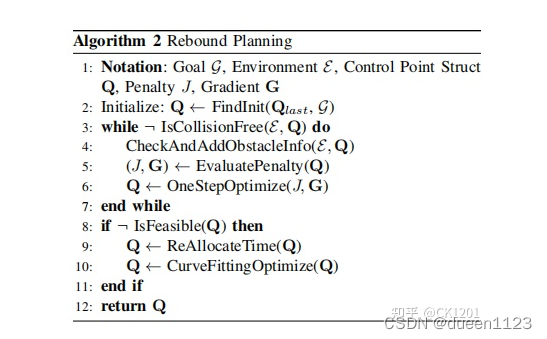
ReboundReplan()
先初始化轨迹,利用mini-snap的方式完成,或者从之前的轨迹再生成轨迹;接着优化轨迹;最后重新调整时间段分配比例
论文中的算法流程
planGlobalTrajWaypoints() & planGlobalTraj()
前者是规划具有起点和一些路标点的全局路径,后者是规划具有起点和目标殿两个点的全局路径
前者没有被调用;后者在ego_replan_fsm.cpp中的planNextWaypoint()函数被调用
二、启动文件

single_uav.launch
(1) 创建iris_0_map_to_world节点,发布/tf话题
<node pkg="tf" type="static_transform_publisher" name="iris_0_map_to_world"
args="0.0 0.0 0 0.0 0.0 0.0 /map /world 40" />
node的属性分别为:pkg程序包名字、type可执行文件的名字、name节点名字、args参数。
args前三个参数为x y z,分别代表着相应轴的平移,单位是米 ;
args中间三个参数为qx qy qz,对应yaw pitch roll 分别代表着绕三个轴的转动,单位是弧度 ;
args的 /map /world 分别代表父坐标系和子坐标系;
args最后一个参数40为发布频率,单位为毫秒
(2) 创建iris_0_world_to_ground_plane节点,发布/tf话题
<node pkg="tf" type="static_transform_publisher" name="iris_0_world_to_ground_plane"
args="0.0 0.0 0 0.0 0.0 0.0 /world /ground_plane 40" />
(3) 启动run_in_xtdrone.launch文件
run_in_xtdrone.launch
(1) 启动advanced_param_xtdrone.xml文件
在xml文件中启动ego_planner_node可执行文件,生成iris_0_ego_planner_node节点
其中有关odometry /camera_pose /image_raw都是在ego_planner_node中有关地图的句柄中订阅的
<node pkg="ego_planner" name="iris_$(arg drone_id)_ego_planner_node" type="ego_planner_node" output="screen">
#订阅的话题:
#vins_estimator/odometry
<remap from="~odom_world" to="/$(arg odometry_topic)"/>
#iris_0/camera_pose
<remap from="~grid_map/pose" to = "/iris_$(arg drone_id)/$(arg camera_pose_topic)"/>
#iris_0/realsense/depth_camera/depth/image_raw
<remap from="~grid_map/depth" to = "/iris_$(arg drone_id)/$(arg depth_topic)"/>
#/xtdrone/iris_0/vins_estimator/odometry
<remap from="~grid_map/odom" to="/xtdrone/iris_$(arg drone_id)/$(arg odometry_topic)"/>
#/iris_0/$(arg cloud_topic)
<remap from="~grid_map/cloud" to="/iris_$(arg drone_id)/$(arg cloud_topic)"/>
<remap from="~planning/broadcast_bspline_from_planner" to = "/broadcast_bspline"/>
#发布的话题:
<remap from="~planning/bspline" to = "/xtdrone/iris_$(arg drone_id)/planning/bspline"/>
<remap from="~planning/broadcast_bspline_to_planner" to = "/broadcast_bspline"/>
(2) 启动traj_server的可执行文件,对应traj_server.cpp文件,生成iris_0_traj_server节点
<node pkg="ego_planner" name="iris_$(arg drone_id)_traj_server" type="traj_server" output="screen">
<remap from="position_cmd" to="/xtdrone/iris_$(arg drone_id)/planning/pos_cmd"/>
<remap from="pose_cmd" to="/xtdrone/iris_$(arg drone_id)/cmd_pose_enu"/>
<remap from="~planning/bspline" to="/xtdrone/iris_$(arg drone_id)/planning/bspline"/>
<param name="traj_server/time_forward" value="1.0" type="double"/>
</node>
三、Map地图
在planner_manager.cpp创建地图句柄,该句柄连接grid_map.cpp文件,接受各种传感器信息,发布障碍物位置信息
grid_map_.reset(new GridMap);
grid_map_->initMap(nh);# ego_planner/plan_env/src/grid_map.cpp
grid_map.cpp完成功能:
(/vins_estimator/extrinsic,相机到IMU的外参)
1. 订阅:
订阅grid_map/depth,即depth_camera/depth/image_raw
订阅vins_estimator/extrinsic
订阅grid_map/pose,即camera_pose
订阅grid_map/odom,
2. 发布:
发布grid_map/occupancy,即occupancy_buffer中的障碍物的位置
发布grid_map/occupancy_inflate,即occupancy_buffer_inflate中的障碍物的位置
其中,occupancy_buffer及occupancy_buffer_inflate容器中局部地图范围内的所有点进行判断,若occupancy_buffer超过障碍物最小概率,同时occupancy_buffer_inflate数为1,且不超过高度范围,则将其从voxel序列还原成三维位置点,推入cloud容器中,最后一并发布。
depthPoseCallback()
获得最新的相机Pose 与 深度图,如果相机的位置处于全局地图Map_size之外,则就会将md.occ_need_update这一flag置false,反之置为true。
updateOccupancyCallback()
occ_timer_ = node_.createTimer(ros::Duration(0.05), &GridMap::updateOccupancyCallback, this);
定时器回调函数,地图节点通过这一回调函数定时更新地图。
第一个flag是md.occ_need_update,只有接收到新图像且位于地图范围之内,才会进行接下来的projectDepthImage()及raycastProcess()这两个流程。
第二flag是md.local_updated,这一flag只在raycastProcess中判断深度图投影点数量不为零是才会置为true,这时才会进入clearAndInflateLocalMap()这一流程,对局部地图进行膨胀和更新。
详细代码解读:https://blog.csdn.net/weixin_45736684/article/details/114239477
四、B样条轨迹
在planner_manager.cpp创建句柄如下
bspline_optimizer_.reset(new BsplineOptimizer);
bspline_optimizer_->setParam(nh);
bspline_optimizer_->setEnvironment(grid_map_, obj_predictor_);
grid_map_包括所有GridMap类里的信息,例如mp_,md_
五、搜索
在planner_manager.cpp调用搜索部分代码
bspline_optimizer_->a_star_.reset(new AStar);
bspline_optimizer_->a_star_->initGridMap(grid_map_, Eigen::Vector3i(100, 100, 100));
本文参考:
https://blog.csdn.net/qq_35635374/article/details/121610987
https://zhuanlan.zhihu.com/p/369198624
https://wenku.baidu.com/view/befa33eaa2c7aa00b52acfc789eb172ded6399fa.html
https://zhuanlan.zhihu.com/p/369196042
智能推荐
前端开发之vue-grid-layout的使用和实例-程序员宅基地
文章浏览阅读1.1w次,点赞7次,收藏34次。vue-grid-layout的使用、实例、遇到的问题和解决方案_vue-grid-layout
Power Apps-上传附件控件_powerapps点击按钮上传附件-程序员宅基地
文章浏览阅读218次。然后连接一个数据源,就会在下面自动产生一个添加附件的组件。把这个控件复制粘贴到页面里,就可以单独使用来上传了。插入一个“编辑”窗体。_powerapps点击按钮上传附件
C++ 面向对象(Object-Oriented)的特征 & 构造函数& 析构函数_"object(cnofd[\"ofdrender\"])十条"-程序员宅基地
文章浏览阅读264次。(1) Abstraction (抽象)(2) Polymorphism (多态)(3) Inheritance (继承)(4) Encapsulation (封装)_"object(cnofd[\"ofdrender\"])十条"
修改node_modules源码,并保存,使用patch-package打补丁,git提交代码后,所有人可以用到修改后的_修改 node_modules-程序员宅基地
文章浏览阅读133次。删除node_modules,重新npm install看是否成功。在 package.json 文件中的 scripts 中加入。修改你的第三方库的bug等。然后目录会多出一个目录文件。_修改 node_modules
【】kali--password:su的 Authentication failure问题,&sudo passwd root输入密码时Sorry, try again._password: su: authentication failure-程序员宅基地
文章浏览阅读883次。【代码】【】kali--password:su的 Authentication failure问题,&sudo passwd root输入密码时Sorry, try again._password: su: authentication failure
整理5个优秀的微信小程序开源项目_微信小程序开源模板-程序员宅基地
文章浏览阅读1w次,点赞13次,收藏97次。整理5个优秀的微信小程序开源项目。收集了微信小程序开发过程中会使用到的资料、问题以及第三方组件库。_微信小程序开源模板
随便推点
Centos7最简搭建NFS服务器_centos7 搭建nfs server-程序员宅基地
文章浏览阅读128次。Centos7最简搭建NFS服务器_centos7 搭建nfs server
Springboot整合Mybatis-Plus使用总结(mybatis 坑补充)_mybaitis-plus ruledataobjectattributemapper' and '-程序员宅基地
文章浏览阅读1.2k次,点赞2次,收藏3次。前言mybatis在持久层框架中还是比较火的,一般项目都是基于ssm。虽然mybatis可以直接在xml中通过SQL语句操作数据库,很是灵活。但正其操作都要通过SQL语句进行,就必须写大量的xml文件,很是麻烦。mybatis-plus就很好的解决了这个问题。..._mybaitis-plus ruledataobjectattributemapper' and 'com.picc.rule.management.d
EECE 1080C / Programming for ECESummer 2022 Laboratory 4: Global Functions Practice_eece1080c-程序员宅基地
文章浏览阅读325次。EECE 1080C / Programming for ECESummer 2022Laboratory 4: Global Functions PracticePlagiarism will not be tolerated:Topics covered:function creation and call statements (emphasis on global functions)Objective:To practice program development b_eece1080c
洛谷p4777 【模板】扩展中国剩余定理-程序员宅基地
文章浏览阅读53次。被同机房早就1年前就学过的东西我现在才学,wtcl。设要求的数为\(x\)。设当前处理到第\(k\)个同余式,设\(M = LCM ^ {k - 1} _ {i - 1}\) ,前\(k - 1\)个的通解就是\(x + i * M\)。那么其实第\(k\)个来说,其实就是求一个\(y\)使得\(x + y * M ≡ a_k(mod b_k)\)转化一下就是\(y * M ...
android 退出应用没有走ondestory方法,[Android基础论]为何Activity退出之后,系统没有调用onDestroy方法?...-程序员宅基地
文章浏览阅读1.3k次。首先,问题是如何出现的?晚上复查代码,发现一个activity没有调用自己的ondestroy方法我表示非常的费解,于是我检查了下代码。发现再finish代码之后接了如下代码finish();System.exit(0);//这就是罪魁祸首为什么这样写会出现问题System.exit(0);////看一下函数的原型public static void exit (int code)//Added ..._android 手动杀死app,activity不执行ondestroy
SylixOS快问快答_select函数 导致堆栈溢出 sylixos-程序员宅基地
文章浏览阅读894次。Q: SylixOS 版权是什么形式, 是否分为<开发版税>和<运行时版税>.A: SylixOS 是开源并免费的操作系统, 支持 BSD/GPL 协议(GPL 版本暂未确定). 没有任何的运行时版税. 您可以用她来做任何 您喜欢做的项目. 也可以修改 SylixOS 的源代码, 不需要支付任何费用. 当然笔者希望您可以将使用 SylixOS 开发的项目 (不需要开源)或对 SylixOS 源码的修改及时告知笔者.需要指出: SylixOS 本身仅是笔者用来提升自己水平而开发的_select函数 导致堆栈溢出 sylixos