Apollo自动驾驶入门课程第⑦讲 — 规划(上)_apollo自动驾驶入门课程pdf pan-程序员宅基地
目录
本文转自微信公众号:Apollo开发者社区 原创: 阿波君 Apollo开发者社区 9月13日

上周我们发布了无人驾驶技术的 预测篇,简要介绍了预测的主要方法以及递归神经网络在预测中的应用。随着知识讲解的深入,越来越多的开发者加入到了Apollo学习交流社群中。希望开发者们可以充分利用Apollo平台,在吸收新知识的同时碰撞出思维的火花。
本期我们将介绍路径规划。在规划中我们将结合高精度地图、定位和预测的相关知识,从路线导航和轨迹生成两方面来构建车辆轨迹。

视频链接为:Apollo自动驾驶入门课程Sebastian规划_腾讯视频
1. 规划简介
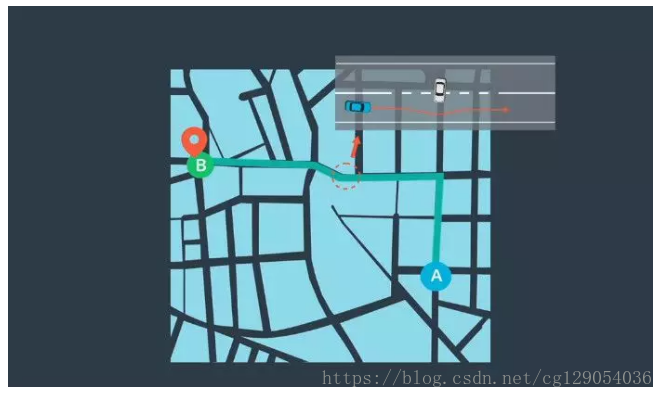
路径规划是指通过一定的规则,找到一条通过世界的路径来达到我们想去的地方。规划的第一步是路线导航,侧重于研究如何从地图上的A点前往B点。在路线导航时,将地图数据作为输入,并输出可行驶路径。手机导航系统是路线导航的一个示例。在Apollo中,可以通过路线规划模块处理该任务。一旦我们构建出高水平的路线,我们就会放大至轨迹规划。该轨迹由一系列点定义,每个点都有一个关联速度和一个指示何时应抵达那个点的时间戳。通过轨迹规划,我们可以做出微妙的决策,以避开障碍物,并为乘客创造平稳的乘车体验。在Apollo中,我们通过规划模块处理该任务。路线规划的目标是,找到从地图上的A前往B的最佳路径。轨迹规划的目标是找到避免碰撞和保持舒适度的可执行轨迹。
路径规划使用三个输入,第一个输入为地图,Apollo提供的地图数据包括公路网和实时交通信息。第二个输入为我们当前在地图上的位置。第三个输入为我们的目的地,目的地取决于车辆中的乘客。
2. 将地图转为图形
当人们试图在地图上找到从A到B的路线时,通常会沿着道路追踪路径,以查看是否存在通往目的地的任何路径,这被称为搜索。Apollo也通过搜索来查找路线,但它使用了更智能的搜索算法。在进行智能搜索算法以前,我们需要将地图数据重新格式化为“图形”的数据结构。
该图形由“节点”(node)和“边缘”(edge)组成。节点代表路段,边缘代表这些路段之间的连接。例如:在交叉路口,汽车可从节点1移动到节点2、节点3或节点4,反之亦然。
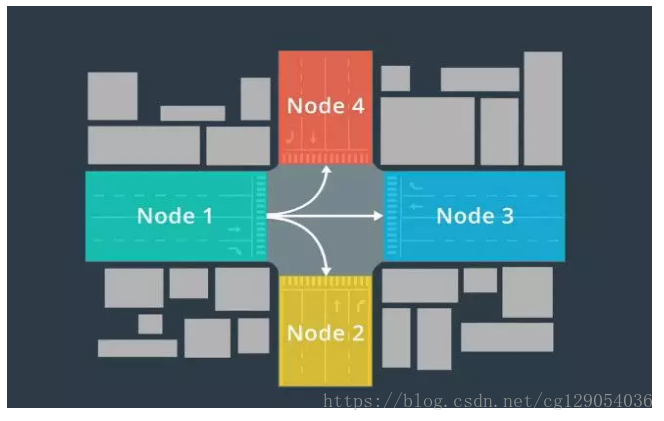
我们可以对一个节点移动到另一个节点所需的成本进行建模。例如在现实生活中,拐过一个交叉路口比直行更费劲,所以从节点1到节点4的成本高于从节点1到节点3的成本。 将地图转换为图形的好处在于,在计算机科学领域中,人们已发现许多用于在图形中查找路径的快速算法(下一节中会详细介绍)。一旦我们在图形中找到了一条好路径,就可以轻松地将图形中的路径重新转换为地图上的路径。
3. 路径查找算法:A*
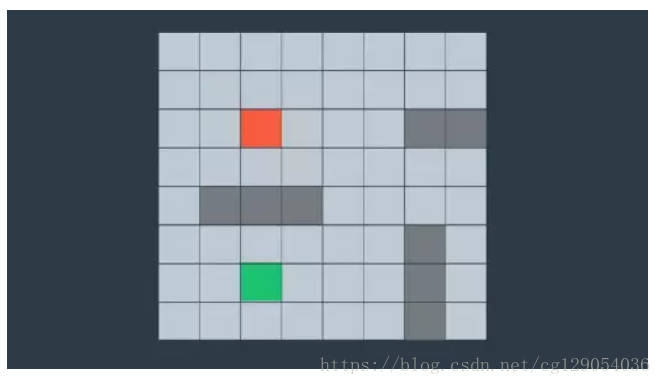
A* 是经典的路径查找处理算法。在本节中,我们将演示A* 如何通过网格进行工作。我们把网格中的每个单元格当作一个节点。并且规定能够从任何一个节点移动到与其相邻的任意节点。这个特殊网格还包含一些阻挡潜在路径的墙壁(下图中的灰色部分)。
对人类来说,通过查看图形便可以轻易找出最佳路径。但对于计算机而言,这并不明显。计算机必须确认是否存在通往目的地的路径,并竭尽所能地尝试所有可能的路径来从其中选出最优路径。但是,这需要耗费大量的时间,尤其是在地图非常大的时候。从任何给定的节点来看,最多有8个用于下一步的选项,因为存在8个相邻的单元格。对于8个中的每一个选项,下一步又有另外8个选项。如果我们展开所有节点,搜索量将暴增至即使最快的计算机也无法处理的程度。
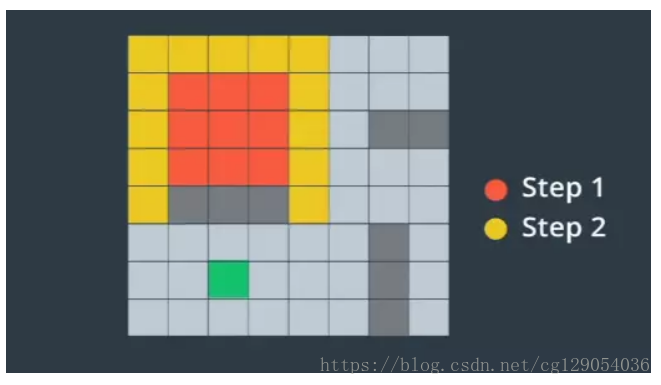
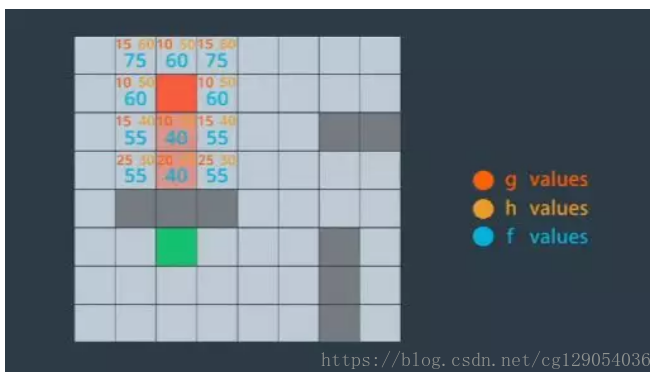
下面我们将展示A*算法的详细过程(如下图):从初始节点开始,我们需要确定8个相邻节点中,哪个是最有希望的候选节点。对于每个候选节点,我们考虑两件事情。首先,我们计算从开始节点到候选节点的成本。然后,我们估计从候选节点前往目的地的成本。计算前往候选节点的成本很容易,因为它已经与我们相邻。计算从候选节点到目的地的成本很困难。但是,通过简单计算从候选节点到目的地的距离,我们通常可以做出很好的估计。
我们用变量g和h表示每个成本。g值为开始节点前往候选节点的成本,h值为候选节点前往目的地的估计成本或启发式成本。根据我们的具体情况,我们可以自定义成本估算方式。例如,交通堵塞会增加前往目的地的成本,所以交通繁忙的路径具有更高的成本。对于每个候选节点,我们通过添加g值和h值来计算总和,即f值。最佳候选节点是f值最小的节点。每当我们抵达新节点时,我们通过重复此过程来选择下一个候选节点,而且总是选择我们尚未访问过且具有最小f值的节点。这就是A* 算法,它建立了一条稳定前往目的地的路径。
现在我们来考虑一下现实世界中的地图。
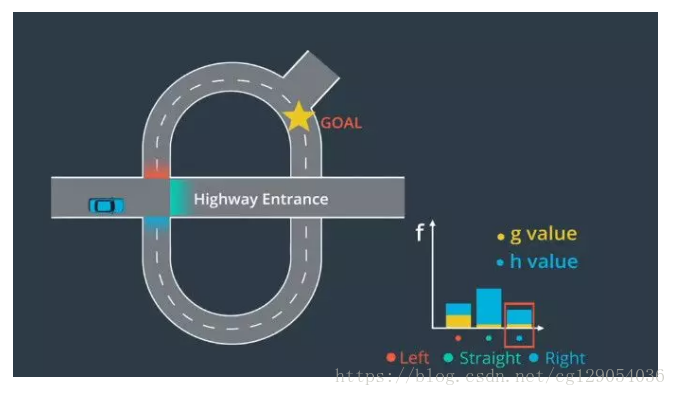
假设我们到达了一个交叉路口,我们可以沿着公路直走、左转或右转。首先,我们将把这张地图转换为具有三个候选节点(left,straight,right)的图形。接下来,我们将对选项进行评估。在实践中,拐过交叉路口很费劲,所以我们为left节点分配了更高的g值(g值表示从起始点到候选节点的成本)。在查看公路选项之后,我们意识到必须走很长的路,才能离开公路并返回我们的目标,所以我们为straight选项分配了更高的h值(h值表示从候选节点到目的地的估计成本)。最后,我们通过将g值和h值相加来计算每个节点的f值。我们看到最低f值实际对应右边的候选节点。所以,这是我们接下来要前往的节点。
4. 轨迹生成
高等级地图路线只是规划过程中的一部分,我们仍需要构建沿这条路线前进的低等级轨迹。这意味着要处理一些不属于地图的物体:如其他车辆、自行车或行人。例如,我们可能需要与试图在我们前面掉头的汽车互动,或者我们可能希望超过一辆在公路上行驶的慢车。这些场景需要更低级别、更高精确度的规划。我们将这一级别的规划称为轨迹生成。
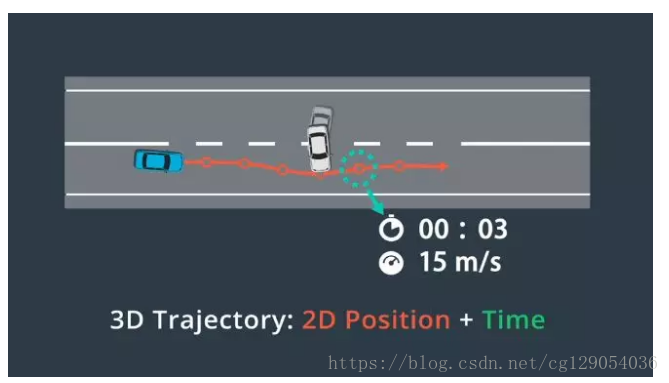
轨迹生成的目标是生成一系列路径点所定义的轨迹。我们为每个路径点分配了一个时间戳和速度。由于移动的障碍物可能会暂时阻挡部分路段,轨迹中的每个路径点都有时间戳。我们可以将时间戳与预测模块的输出相结合,以确保我们计划通过时,轨迹上的每个路径点均未被占用。这些时间戳和空间上的两个维度(2D position)共同创建了一个三维轨迹(3D Trajectory)。我们还为每个路径点指定了一个速度,用于确保车辆按时到达每个路径点。
现实世界中的规划面临多种约束。首先轨迹应能免于碰撞,这意味着必须没有障碍物。其次,要让乘客感到舒适,所以路径点之间的过渡以及速度的任何变化都必须平滑。再者,路径点对车辆应实际可行,例如高速行驶的汽车不能立即做180度转弯。我们不能构建包含这种不可行机动的轨迹。最后,轨迹应合法。我们需要了解每个路径点的交通法律,并确保轨迹遵守这些法律法规。
在道路的任何两点,可能会有多个不会发生碰撞、行驶舒适、可行且合法的轨迹。我们如何选择最佳轨迹呢?答案是使用“成本函数”。成本函数为每个轨迹分配了一个“成本”,我们选择成本最低的轨迹。轨迹“成本”由各种犯规处罚组成,例如:偏离道路中心,有可能产生碰撞,速度限制,轨迹的曲率和加速度让乘客感到不舒服等。
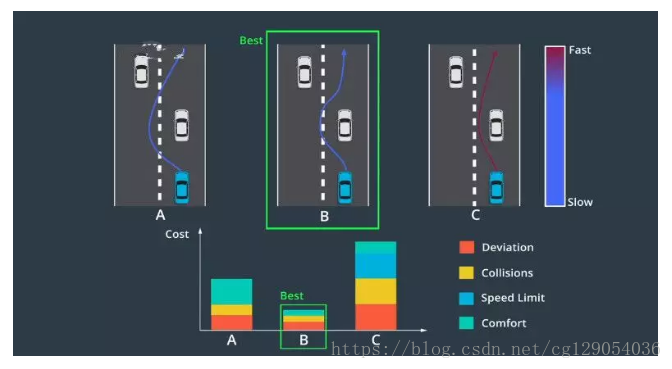
轨迹成本将所有这些缺陷聚合为单个数字,这使我们能对不同的轨迹按数字大小进行排名。车辆甚至可能在不同的环境中使用不同的成本函数。例如,高速路的成本函数可能与停车场的不同。
5. Fernet坐标系
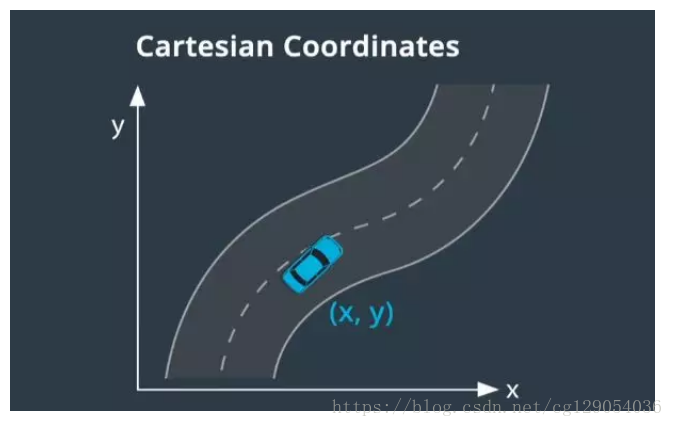
我们通常使用笛卡尔坐标系描述物体的位置,但笛卡尔坐标系对车辆来说并不是最佳选择。即使给出了车辆位置(x,y),如果我们不知道道路在哪,就很难知道车辆行驶了多远也很难知道车辆是否偏离了道路中心。
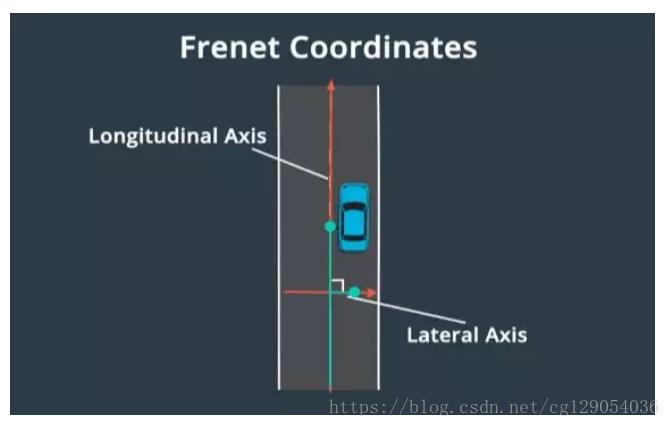
笛卡尔坐标系的替代解决方案为Frenet坐标系。Frenet坐标系描述了汽车相对于道路的位置。在Frenet框架中,s代表沿道路的距离,也被称为纵坐标。d表示与纵向线的位移,也被称为横坐标。在道路的每个点上,横轴和纵轴都是垂直的。纵坐标表示道路中的行驶距离,横坐标表示汽车偏离中心线的距离。
更多详细课程内容,大家可以登陆官网继续学习!
也可以添加社区小助手(Apollodev)为好友,回复“课程学习”进群与其他开发者共同交流学习。

自课程上线以来,浏览量已超10万,已帮助全球97个国家约 7000 名学员入门自动驾驶与 Apollo 开源平台,其中37%为海外学员,本门课程已成为优达学城 (Udacity) 近期获得关注度最高的免费课程之一。
智能推荐
银联 php hex2bin,【密码学】银联有卡交易中密码的加密流程(php版)-程序员宅基地
文章浏览阅读180次。最近在做一个有关银联有卡交易的程序,在研究接口时,发现一个有趣的现象。对于密码加密,银联对不同语言有不同对待:Java版demo最全;NET版本被有意屏蔽(没有放开测试,不知是否正确);PHP版本直接找不到任何有关的踪迹!基于我们程序基本是PHP语言,所以不得已需要自己写这个模块,来完成密码的加密工作。学习加密实现原理理论先行,实践验证,这个方法论屡试不爽!在这里找到一个资料:密码键盘介绍四:Pi..._php sm2加密银联接口
如何解决EDIUS总是意外停止工作问题_edius打开工程文件程序崩溃-程序员宅基地
文章浏览阅读1.4w次。有些小伙伴在一开始使用EDIUS的时候,总是会出现一些小问题,比如添加素材时总是意外停止工作_edius打开工程文件程序崩溃
Java诊断神器:6到飞起的Arthas,这些功能赶紧安排一下!_arthas同时监控两个方法-程序员宅基地
文章浏览阅读400次。1.简介什么是 Arthas?摘录一段官方 Github 上的简介阿里巴巴Arthas是一种诊断工具,使我们能够监视,分析和诊断Java应用程序。使用Arthas的主要好处之一是,我们不需要更改代码,甚至不需要重新启动要监视的Java服务。在本文中,我们将先安装Arthas,然后再进行案例研究以演示Arthas的一些关键功能。最后,由于Arthas是用Java编写的,因此它是跨平台的,可以在Linux,macOS和Windows上正常地运行。2.下载和入门首先,让我们开始直接通过下载链接或使_arthas同时监控两个方法
java实现打印功能-程序员宅基地
文章浏览阅读7.5w次,点赞22次,收藏75次。前言在我们的实际工作中,经常需要实现打印功能。但由于历史原因,Java 提供的打印功能一直都比较弱。实际上最初的 jdk 根本不支持打印,直到 jdk1.1 才引入了很轻量的打印支持。所以,在以前用 Java/Applet/JSP/Servlet 设计的程序中,较复杂的打印都是通过调用 ActiveX/OCX 控件或者 VB/VC 程序来实现的,非常麻烦。实际上,SUN 公司也一直致力于 _java实现打印
关于用Class.forName(“com.mysql.jdbc.Driver”)注册数据库驱动_<% try { // 加载数据库驱动,注册到驱动管理器 class.forname("com.my-程序员宅基地
文章浏览阅读1.5k次。传统的使用jdbc来访问数据库的流程为: Class.forName(“com.mysql.jdbc.Driver”); String url = “jdbc:mysql://localhost:3306/test?user=root&password=123456″; Connection con = DriverManager.getConnection(url); Statem_<% try { // 加载数据库驱动,注册到驱动管理器 class.forname("com.mysql.jd</div>
modbus读取保持寄存器实例_modbus读取寄存器数据-程序员宅基地
文章浏览阅读8.4k次,点赞4次,收藏7次。读取103-110的实例,一共读取3个寄存器请求: 03 00 6B 00 0303 :功能码,表示读取保存寄存器006B,十六进制表示107,从107开始往后读取0003,十六进制表示读取3个寄存器响应: 03 06 02 2B 00 00 00 6403 功能码,直接复制请求的06 表示后面的数据有多少个字节..._modbus读取寄存器数据
随便推点
再记一次w3wp占用CPU过高的解决过程(Dictionary和线程安全)-程序员宅基地
文章浏览阅读173次。在此之前项目有发生过两次类似的状况,都得以解决,但最近又会发现偶尔CPU会跑满,虽然之前使用过WinDbg解决过两次问题但人的记忆是不可靠的,今天处理同样问题的时候还是遇到了一些障碍,这一次希望可以记录的更全面些。 上两次的博文链接:记一次w3wp占用CPU过高的解决过程(Dictionary和线程安全)、EntityFramework中的线程安全,又是Dictionary。 首先请大家不要喷我..._entityframework线程安全
vb.net 接口POST方式传参数提交返回值_vb.net webclient post-程序员宅基地
文章浏览阅读1k次。Try Dim WebClientObj As New System.Net.WebClient() Dim PostVars As New System.Collections.Specialized.NameValueCollection() 'URL _vb.net webclient post
解决EditText 键盘imeOptions 设置后与换行冲突问题-程序员宅基地
文章浏览阅读604次。解决EditText 键盘imeOptions 设置后与换行冲突问题EditText imeOptions 设置必然需要设置singleLines=true 或者设置 inputType=“textXXX”, 这就不太符合需求。 解决办法:继承 EditTextpublic InputConnection onCreateInputConnection(EditorInfo outAttrs) { InputConnection connection = super.onCreate_解决edittext 键盘imeoptions 设置后与换行冲突问题
Pycharm配置Anaconda中的Tensorflow环境详解_pycharm配置anaconda的tensorflow-程序员宅基地
文章浏览阅读4.9w次,点赞6次,收藏21次。Pycharm配置Anaconda中的Tensorflow环境详解1.打开Pycharm软件,新建工程,点击File->Default Settings->Project Interprete2.默认的应该是anaconda下的python环境,我们点击Existing enviroment:3.点击右边...添加:4.找到anaconda目录下的envs,因为我装了两次Tensorfnslow(每创建一个环境,就可以安装一个,不冲突),所以可以看到我这边会有两个这种_pycharm配置anaconda的tensorflow
符号扩展,零扩展与符号缩减-程序员宅基地
文章浏览阅读1.6w次,点赞23次,收藏101次。1. 符号位扩展,零扩展,符号位缩减1.1 符号位扩展高级程序设计语言允许程序员使用包含不同大小整数的对象表达式。那么,当一个表达式的两个操作数大小不同时,有些语言会报错,有些语言则会自动将操作数转换成一个统一的格式。这种转换是有代价的,因此如果你不希望编译器在你不知情的情况下自动加入各种转换到原本非常完美的代码中,你就需要掌握编译器如何处理这些表达式。以-64为例,其8位的二进制补码(1100 0_符号扩展
【引用】DMA内存申请--dma_alloc_coherent_dma引用-程序员宅基地
文章浏览阅读2.8k次。在项目驱动过程中会经常用到dma传输数据,而dma需要的内存有自己的特点,一般认为需要物理地址连续,并且内存是不可cache的,在linux内核中提供一个供dma所需内存的申请函数dma_alloc_coheren. 如下所述:dma_alloc_coherent()dma_alloc_coherent() -- 获取物理页,并将该物理页的总线地址保存于dma_handle,返回该物理页的虚拟地址_dma引用