平衡二叉树详解及C++实现_c++ 二叉搜索树平衡二叉树-程序员宅基地
定义
平衡二叉搜索树:简称平衡二叉树。由前苏联的数学家 Adelse-Velskil 和 Landis 在 1962 年提出的高度平衡的二叉树,根据科学家的英文名也称为 AVL 树。
性质
- 可以是空树
- 加入不是空树,任何一个节点的左右子树都是平衡二叉树,并且高度差的绝对值不超过 1 1 1
为什么要有平衡二叉树
防止搜索二叉树退化为链表
平衡因子(Balance Factor)
即左右两子树的高度差:
B F = h l e f t − h r i g h t BF=h_{left}-h_{right} BF=hleft−hright
平衡二叉树的任何一节点的平衡因子只有三个取值: 0 , 1 , − 1 0,1,-1 0,1,−1,如果绝对值大于 1 1 1,说明该树失衡,就需要进行调整
节点结构
struct treenode
{
int _val;//键值
treenode* _parent;//父节点
treenode* _l, * _r;//左右子树节点
int _deepth;//树高度
treenode(int val = 0) :_val(val), _deepth(1),_l(nullptr),_r(nullptr),_parent(nullptr) {
}
};
基本接口
class AVLTree
{
treenode* _root;//根节点
void _insert(treenode*& , int );//插入
treenode* _erase(treenode* , int);//删除
treenode* get_lmax(treenode* );//获取左子树中的最大值
treenode* LL_roate(treenode*);//左旋
treenode* RR_roate(treenode*);//右旋
treenode* LR_roate(treenode*);//左右旋
treenode* RL_roate(treenode*);//右左旋
treenode* _find(treenode* , int );//查找
void _print(treenode* );//打印树节点
void updata_deepth(treenode* root) {
//更新树高度
root ? root->_deepth = max(get_deepth(root->_l),get_deepth(root->_r)) + 1 : 0;
}
int get_deepth(treenode* root){
//获取树高度
return root ? root->_deepth : 0;
}
int get_balance_factor(treenode* root) {
//获取平衡因子
return root ? get_deepth(root->_l) - get_deepth(root->_r) : 0;
}
public:
void insert(int data);//插入
void erase(int data);//删除
treenode* find(int data);//查找
void print() {
_print(_root); }//打印
};
AVL树失衡调整
要调整失衡的AVL树,就要找到最小不平衡子树,通过调整不平衡子树,来调整失衡的AVL树
最小不平衡子树:高度最小的失衡树。从插入点开始第一个平衡因子绝对值大于1的节点。
调整方法
通过旋转调整不平衡子树,旋转的类型有四种情况:
L L , L R , R R , R L LL,LR,RR,RL LL,LR,RR,RL,分别对应失衡的四种情况。

-
左子树深度高于右子树 ( m a x { h 1 , h 2 } − 2 = m a x { h 3 , h 4 } , 即平衡因子等于 2 ) (max \left \{ h_1,h_2\right \}-2=max\left \{ h_3,h_4\right \},即平衡因子等于2) (max{ h1,h2}−2=max{ h3,h4},即平衡因子等于2)
a.左子树的左子树深度高于左子树的右子树深度 ( h 1 > h 2 , 左子树平衡因子为 1 , R R ) (h_1>h_2,左子树平衡因子为1,RR) (h1>h2,左子树平衡因子为1,RR)
b.左子树的右子树深度高于左子树的左子树深度 ( h 2 > h 1 , 左子树平衡因子为 − 1 , L R ) (h_2>h_1,左子树平衡因子为-1,LR) (h2>h1,左子树平衡因子为−1,LR) -
右子树深度高于左子树 ( m a x { h 3 , h 4 } − 2 = m a x { h 1 , h 2 } , 即平衡因子等于 − 2 ) (max \left \{ h_3,h_4\right \}-2=max\left \{ h_1,h_2\right \},即平衡因子等于-2) (max{ h3,h4}−2=max{ h1,h2},即平衡因子等于−2)
a.右子树的右子树深度高于右子树的左子树深度 ( h 4 > h 3 , 右子树平衡因子为 − 1 , L L ) (h_4>h_3,右子树平衡因子为-1,LL) (h4>h3,右子树平衡因子为−1,LL)
b.右子树的左子树深度高于右子树的右子树深度 ( h 3 > h 4 , 右子树平衡因子为 1 , R L ) (h_3>h_4,右子树平衡因子为1,RL) (h3>h4,右子树平衡因子为1,RL)
旋转的目的就是减少高度,通过降低整棵树的高度来平衡。哪边的树高,就把那边的树向上旋转。
左旋 ( L L ) (LL) (LL)

- 让其右子树代替该节点
- 并将其右子树的左子树(如果有的话)代替其右子树
- 让该节点成为右子树的左子树
就是让右儿子当爹。这样操作逻辑上相当于让整棵树向左旋转了。
代码实现时,注意要将父节点(如果有的话)的子树(左子树或右子树,要判断一下)改为该节点的右子树(右旋也同理)。
代码实现
inline treenode* AVLTree::LL_roate(treenode* root)
{
treenode* s = root->_r;//记录右子树
//调整父节点
s->_parent = root->_parent;//改变右子树的父节点
if (root->_parent) //如果该节点有父节点
{
if (root->_parent->_l == root)//判断该节点是父节点的左子树还是右子树
root->_parent->_l = s;//将父节点的子树改为该节点的右子树
else
root->_parent->_r = s;
}
root->_parent = s;//将该节点的父节点改为右子树,这个一定要最后调整
//调整子树
if (s->_l)//如果右子树和有左子树
s->_l->_parent = root;//就将右子树的左子树父节点改为该节点
root->_r = s->_l;//将右子树的左子树给该节点的右子树
s->_l = root;//将右子树的左子树改为该节点
//跟更新树高度
updata_deepth(root);//必须先更新该节点
updata_deepth(s);
return s;//返回该树的新的根节点
}
右旋 ( R R ) (RR) (RR)

- 让其左子树代替该节点
- 并将其左子树的右子树(如果有的话)代替其左子树
- 让该节点成为左子树的右子树
就是让左儿子当爹。这样的操作在逻辑上相当于将整棵树向右旋转了。
inline treenode* AVLTree::RR_roate(treenode* root)
{
treenode* s = root->_l;//记录左子树
//调整父节点
s->_parent = root->_parent;//改变左子树的父节点
if (root->_parent)//如果该节点有父节点
{
if (root->_parent->_l == root)//判断该节点是父节点的左子树还是右子树
root->_parent->_l = s;//将父节点的子树改为该节点的左子树
else
root->_parent->_r = s;
}
root->_parent = s;//将该节点的父节点改为左子树
//调整子树
if (s->_r)//如果左子树有右子树
s->_r->_parent = root;//就将左子树的右子树的父节点改为该节点
root->_l = s->_r;//将该节点的左子树改为左子树的右子树
s->_r = root;//将左子树的右子树改为该节点
//更新树高度
updata_deepth(root);
updata_deepth(s);
return s;//返回该树新的根节点
}
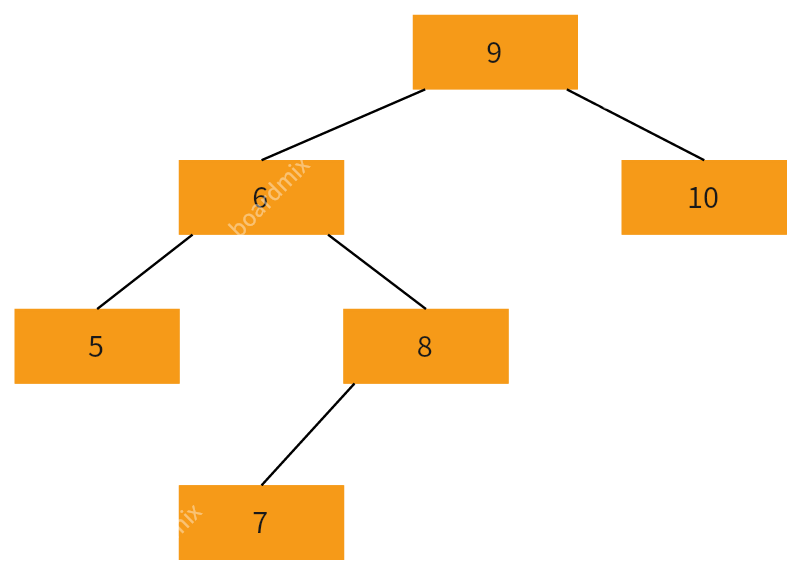
左右旋 ( L R ) (LR) (LR)
当失衡是由于左子树的右子树引起时,单纯的右旋不能解决问题。如下图
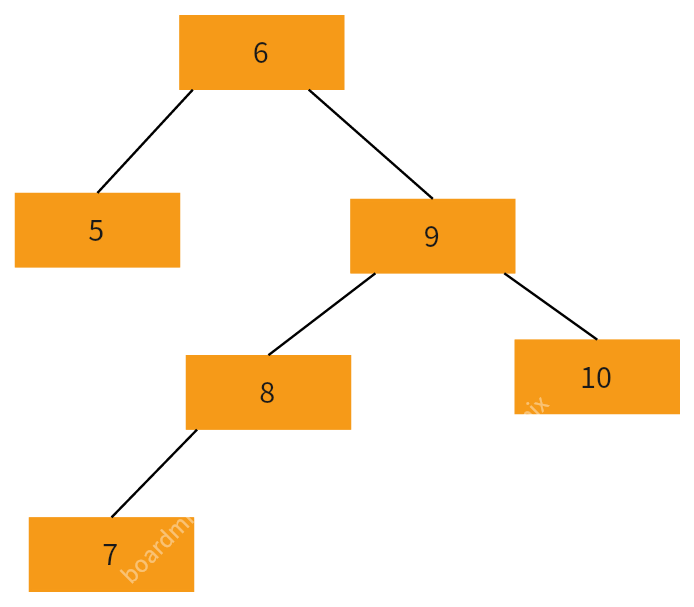
如果直接进行右旋,结果如下,并没有使二叉树回复平衡。
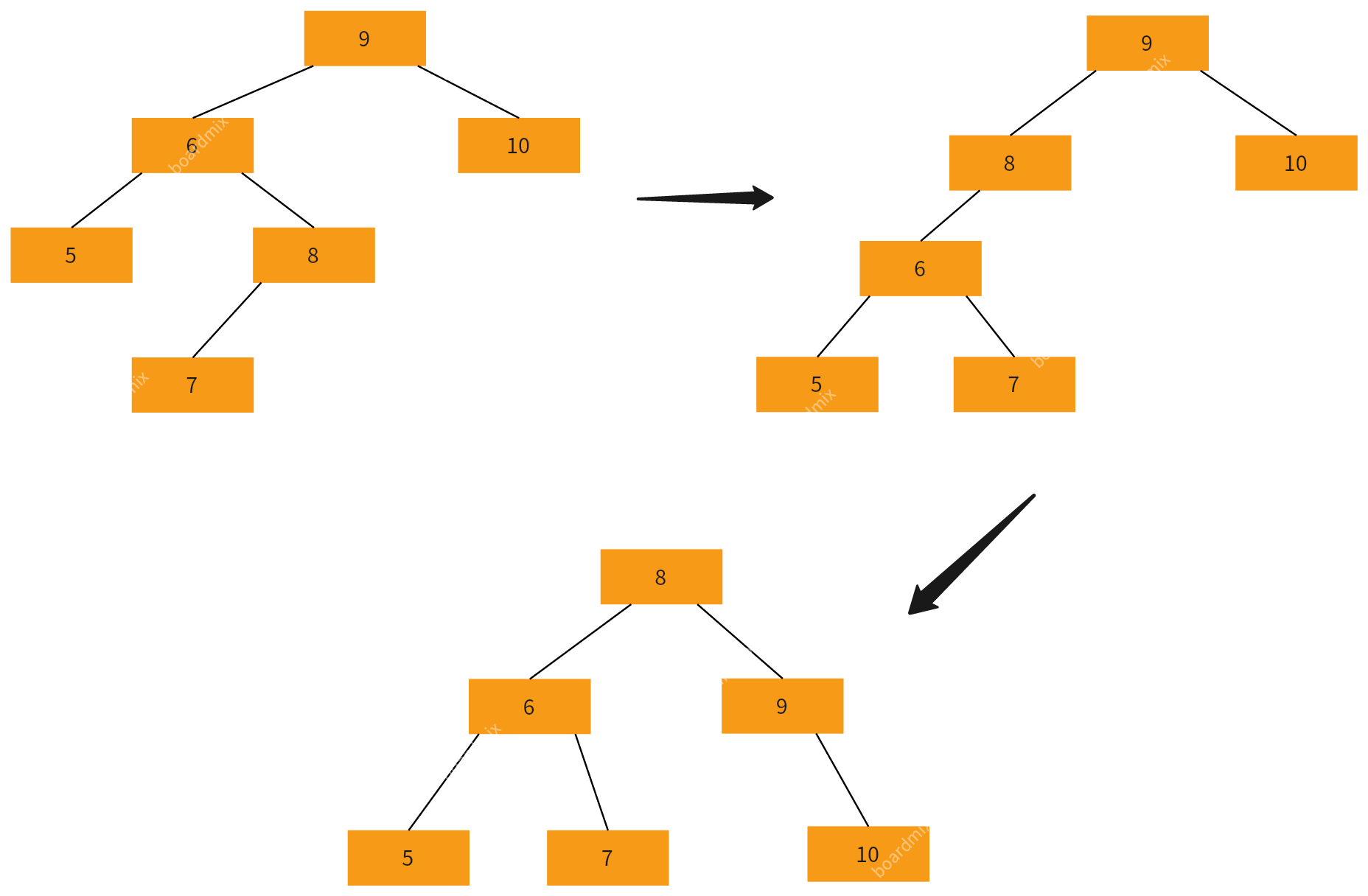
这时,我就就要先对左子树进行左旋操作,让左子树的左子树变为引起失衡的子树,再进行右旋,就可以将二叉树恢复平衡。
代码实现
inline treenode* AVLTree::LR_roate(treenode* root)
{
LL_roate(root->_l);//左旋左子树
return RR_roate(root);//
}
右左旋 ( R L ) (RL) (RL)
于左右旋同理,就不过多赘述,直接给出代码
inline treenode* AVLTree::RL_roate(treenode* root)
{
RR_roate(root->_r);
return LL_roate(root);
}
接口的具体实现
插入
插入同搜索二叉树基本相同,但是在每次插入之后要更新树的高度,并且检查树是否失衡,这样就可以在递归回退时找到最小不平衡子树,并且旋转调整他。
代码实现
inline void AVLTree::insert(int data)
{
if (!_root)//为空树时,直接赋值改变根节点
{
_root = new treenode(data);
return;
}
_insert(_root, data);//不为空就插入
}
inline void AVLTree::_insert(treenode*& root, int data)
{
//插入
//按照二叉搜索树进行插入
if (root->_val < data)
{
if (root->_r)
_insert(root->_r, data);
else
{
root->_r = new treenode(data);
root->_r->_parent = root;
}
}
else
{
if (root->_l)
_insert(root->_l, data);
else
{
root->_l = new treenode(data);
root->_l->_parent = root;
}
}
//更新深度
updata_deepth(root);
//判断是否失衡
if (get_balance_factor(root) == -2)
{
//LL型,左旋一次
//右子树的右子树插入导致失衡
if (get_balance_factor(root->_r) == -1)
root = LL_roate(root);
//RL型,先让右子树右旋再让根节点左旋
//右子树的左子树插入导致失衡
else if (get_balance_factor(root->_r) == 1)
root = RL_roate(root);
}
else if (get_balance_factor(root) == 2)
{
//RR型,右旋一次
//左子树的左子树插入导致失衡
if (get_balance_factor(root->_l) == 1)
root = RR_roate(root);
//LR型,先让左子树左旋再让根节点右旋
//左子树的右子树导致失衡
else if (get_balance_factor(root->_l) == -1)
root = LR_roate(root);
}
}
删除
对于删除,需要考虑三种情况:
- 删除节点为叶子节点:直接将删除即可
- 删除节点有一个子树:将该节点子树替代该节点的位置
- 删除节点有两个子树:用中序遍历的前驱或后继代替该节点位置,用递归将该种情况转化为前两种情况(细节见代码)
前驱和后继
删除有两个子树的节点时,让左子树的最大值(前驱)或是右子树的最小值(后继)替代该节点位置,依然满足搜索二叉树。
实现时,将该节点的值直接改为前驱(后继),然后要删除节点就变为前驱(后继),再递归找到前驱(后继),最后都会转化成前两种情况。
寻找前驱代码的实现(后继类似)
inline treenode* AVLTree::get_lmax(treenode* lroot)
{
while (lroot->_r)
lroot = lroot->_r;
return lroot;
}
代码实现
inline void AVLTree::erase(int data)
{
if (!_root)//空树不能进行删除
return;
_root = _erase(_root, data);
}
inline treenode* AVLTree::_erase(treenode* root, int data)
{
//1.删除节点
if (root->_val < data)
if (root->_r)
_erase(root->_r, data);
else if (root->_val > data)
if (root->_l)
_erase(root->_l, data);
else
{
//删除有三种情况
//1.删除节点为叶子节点
//直接删除
if (!root->_l && !root->_r)
{
if (root->_parent)
{
if (root->_parent->_l == root)
root->_parent->_l = nullptr;
else
root->_parent->_r = nullptr;
}
delete root;
root = nullptr;
}
//2.删除节点有一个子树
//将该子树代替掉删除节点的位置
else if (!root->_l || !root->_r)
{
if (root->_parent)
{
if (root->_parent->_l == root)
root->_parent->_l = root->_l ? root->_l : root->_r;
else
root->_parent->_r = root->_l ? root->_l : root->_r;
}
treenode* s = root->_l ? root->_l : root->_r;
s->_parent = root->_parent;
delete root;
root = s;
}
// 3.删除节点有两个子树
//用中序遍历的前驱或后继代替该节点
else
{
treenode* lmax = get_lmax(root->_l);
root->_val = lmax->_val;
_erase(root->_l, lmax->_val);
}
}
//2.调整高度
updata_deepth(root);
//3.调整最小不平衡子树
if (get_balance_factor(root) == 2)
{
if (get_balance_factor(root->_l) == 1)
root = RR_roate(root);
else
root = LR_roate(root);
}
else if (get_balance_factor(root) == -2)
{
if (get_balance_factor(root) == -1)
root = LL_roate(root);
else
root = RL_roate(root);
}
return root;
}
查找
很简单,这里只给出代码
inline treenode* AVLTree::find(int data)
{
if (!_root)
return nullptr;
return _find(_root, data);
}
inline treenode* AVLTree::_find(treenode* root, int data)
{
if (!root)
return nullptr;
if (data < root->_val)
return _find(root->_l, data);
else if (data > root->_val)
return _find(root->_r, data);
else
return root;
}
总结
平衡二叉树旋转时,交换的变量很多,要时刻记着哪些变量已经交换,哪些还没有,实现时要仔细不然很容易出现问题。
智能推荐
高效生产管理:选择顺通鞋厂ERP系统派单的理由-程序员宅基地
文章浏览阅读804次,点赞26次,收藏17次。然而,传统的生产管理模式已经难以满足现代企业的需求,因此选择一款适合自身业务特点的生产管理软件成为了企业的当务之急。顺通鞋业ERP系统的派单功能具备强大的数据分析能力,能够为企业提供全面的生产数据报表。ERP系统的派单功能作为高效生产管理的解决方案,企业将获得实时监控、简化流程、智能分析、灵活配置、安全可靠和优质服务等多方面的优势。显然,传统的生产管理模式已经难以满足现代企业的需求,因此选择一款适合自身业务特点的生产管理软件成为了企业的当务之急。ERP系统的派单功能将成为企业实现高效生产管理的有力武器。
COMSOL光电、FDTD光学器件超表面、TCAD半导体器件仿真技术与应用直播学习_comsol与tcad仿真能结合起来吗-程序员宅基地
文章浏览阅读362次。Ø 散射边界和端口边界的使用方法和技巧(波失方向和极化方向设置、S参数、反射率和透射率的计算和提取、高阶衍射通道反射投射效率的计算)Ø COMSOL WITH MATLAB 进行复杂的物理场或者集合模型的建立(如超表面波前的衍射计算)Ø COMSOL WITH MATLAB 进行复杂函数的设置(如石墨烯电导函数的设置和仿真)Ø 热电子光探测器的电磁场空间分布与FDTD材料折射率的导出(脚本计算不同金属层的吸收)Ø 利用S参数分析组并通过脚本实现金属纳米小球的吸收/散射消光与近场增强的计算。_comsol与tcad仿真能结合起来吗
〖程序员的自我修养 - 精炼面试篇⑫〗- HR面试避坑指南 - 工作能力类型问题的踩坑点-程序员宅基地
文章浏览阅读1.2w次,点赞25次,收藏24次。常见的个人能力踩坑点的问题学完了,接下来我们再看看关于 "工作能力" 的一些常见问题,面对这些问题我们又该如何的应对呢?该章节将会一一解答。
uni-app运行到小程序模拟器,微信开发者工具报错“ERR_CONNECTION_TIMED_OUT”_微信接口connect timed out-程序员宅基地
文章浏览阅读765次。uni-app运行到小程序模拟器,微信开发者工具报错“ERR_CONNECTION_TIMED_OUT”_微信接口connect timed out
鲲鹏弹性云服务器型号,鲲鹏弹性云服务器型号-程序员宅基地
文章浏览阅读238次。鲲鹏弹性云服务器型号 内容精选换一换弹性云服务器(Elastic Cloud Server)是一种可随时自动获取、计算能力可弹性伸缩的云服务器,可帮助您打造可靠、安全、灵活、高效的应用环境,确保服务持久稳定运行,提升运维效率。公有云平台支持弹性云服务器在专属主机与公共资源池之间迁移,具体包括:将创建在专属主机上的弹性云服务器迁移至其他专属主机。将创建在专属主机上的弹性云服务器迁移至公共资源池,即不..._以下哪种是鲲鹏通用增强型弹性云服务器
Springboot 超简单实现在线预览,Word文档 doc、xlsx、pdf、txt等_springboot在线预览word-程序员宅基地
文章浏览阅读1.6w次,点赞21次,收藏124次。前言PDF、TXT 只要资源可访问,根本就不需要进行任何处理,直接访问查看就完事了。也是因为这个PDF可以直接查看(现在浏览器基本支持了),那么我们实现Word文档在线预览,其实也是 把WORD文档 复制一份生成一份供预览的 PDF文件而已。先看看效果:正文这篇实例,实现在线预览WORD文档,分两步:一. 安装OpenOffice二.写点小代码一.安装OpenOffice不要看到安装东西就觉得麻烦,因为这个安装不需要做任何配置,你只需要..._springboot在线预览word
随便推点
WPF基础到企业应用系列6——布局全接触-程序员宅基地
文章浏览阅读88次。本文转自:http://knightswarrior.blog.51cto.com/1792698/365351一. 摘要首先很高兴这个系列能得到大家的关注和支持,这段时间一直在研究Windows Azure,所以暂缓了更新,同时也本着想把它写好、宁缺毋滥的精神,在速度上自然也就慢了下来,这篇文章拖拖拉拉也经历了十多天才发布出来(每天写一 点),不过请大家放心,这个系列一定会继续写下去。由..._c#的 uniformgrid x:name="wrappanel
关于深度学习人工智能模型的探讨(二)(1)_深度学习可以用不完备性定理解释么-程序员宅基地
文章浏览阅读175次。第二章 不完备性定理2.1 一剑封喉1931年,希尔伯特先生刚刚退休,清闲了没几天。有一个叫哥德尔的小混混找上门来,仅仅用了一招。仅此一招,一剑封喉,就击败了武林大盟主希尔伯特。当年哥德尔粉碎希尔伯特梦想的,是一个简洁漂亮的小证明。当这个小小的证明一横空出世,就电闪雷鸣万道金光,对雄心勃勃的数学界来说更彷如晴天霹雳,宣判了希尔伯特纲领的彻底破产。真是令人沮丧,哥德尔不完全性定理一举粉碎了..._深度学习可以用不完备性定理解释么
matlab格兰杰因果检验,如何用STATA做panel data的格兰杰因果检验-程序员宅基地
文章浏览阅读889次。Granger causality testgcause var1 var2 [if exp] [in range] , lags(#) [ exog(varlist) regress]gcause is for use with time-series data.You must tsset your data beforeusing this commands; see help tsse..._格兰杰因果分析原理 matlab
初识Lua-OpenWrt路由界面配置_openwrt overview-程序员宅基地
文章浏览阅读2.4k次。OpenWrt路由的界面配置使用LuCI系统管理。在此,对其中的目录结构进行介绍:-目录结构以status模块为例进行说明,模块入口文件status.lua在目录lua\luci\contro_openwrt overview
ASM字节码编程 | 如果你只写CRUD,那这种技术栈你永远碰不到!!!_asm-commonsgit下载-程序员宅基地
文章浏览阅读2.8k次。小傅哥 | https://bugstack.cn 沉淀、分享、成长,专注于原创专题案例,以最易学习编程的方式分享知识,让自己和他人都能有所收获。目前已完成的专题有;Netty4.x实战专题案例、用Java实现JVM、基于JavaAgent的全链路监控、手写RPC框架、架构设计专题案例、源码分析、算法学习等。一、前言写这篇文章的时候我在想可能大部分程序员包括你我,常常都在忙于业务开发或奔..._asm-commonsgit下载
微信8.0.6内测版本更新啦,这次又“炸”了(附内测地址)-程序员宅基地
文章浏览阅读2.9k次。哈喽大家好,我是程序员双木L,不定时给大家带来各种好玩且有趣的功能!iOS微信8.0.6正式版已经发布,很多安卓微信用户就吐槽:iOS都8.0.6版本了,安卓咋还一直停留在8.0.3版本呢?最近,微信团队直接跳过了安卓微信8.0.4和8.0.5,直接发布了8.0.6测试版,这下终于跟iOS版本同步了微信团队的更新说明只是说了"解决了一些已知问题",下面就让小编带领大家看看有哪些变化吧:1、新版拍一拍可以设置使用动效表情我觉得最有意思的更新是:拍一拍支持添加表情啦,只需在拍一拍后缀加入炸弹、庆祝、烟_微信8.0.6