三维重建的定位定姿算法-程序员宅基地
点击上方“3D视觉工坊”,选择“星标”
干货第一时间送达

作者丨李城
编辑丨计算机视觉工坊
点击进入—>3D视觉工坊学习交流群
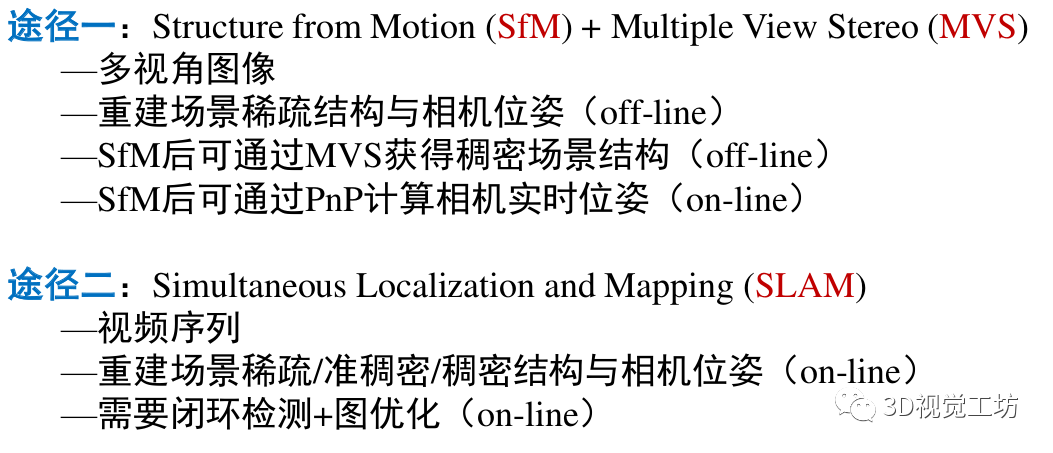
3D视觉的核心问题是恢复场景结构、相机位姿、和相机参数,而解决方式有两种,一种是off-line的sfm(structure from motion),一种on-line的slam(simultaneous localization and mapping)。Slam 与sfm的区别在于,大多数slam系统是需要提前标定相机,而sfm 则不需要提前标定(通常所说的三维重建和slam的区别,严格意义上应该是sfm 和slam的区别)。
Sfm 可以分为以下几类:Global SfM、Incremental SfM、Hybrid SfM、Distributed SfM,这里主要讲解Global SfM和ncremental SfM(主要集中在global sfm)。
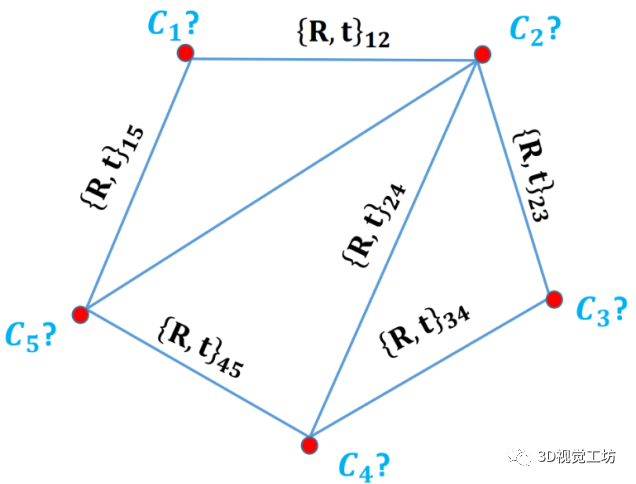
一、Global SfM workflow:

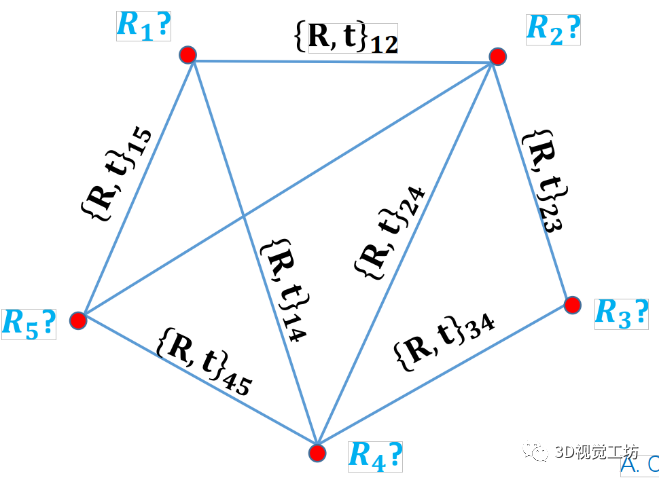
Global sfm 的内容包括rotation averaging 和anslation averaging。
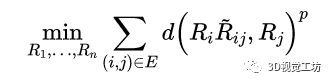
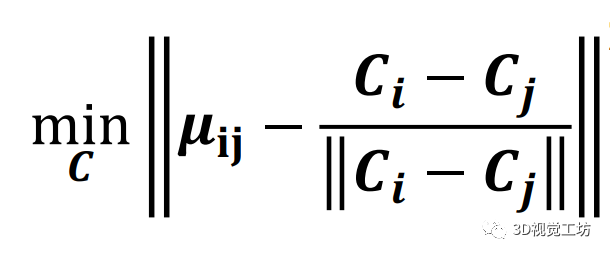
Rotation averaging
观测值:一组相机pose的相对rotation
目标:计算相机的绝对旋转
优化:L2范数,采用L2范数的原因有两个:1)估计一个好的旋转初始值 2)收敛快
理论基础:
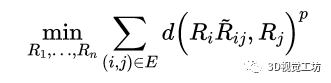
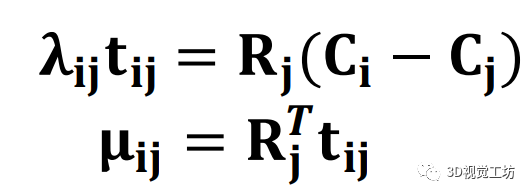
translation averaging
观测值:同rotation averaging 一样,观测值是两一组pose之间的相对translation
目标:计算相机的绝对旋转
优化:L1范数,原因是L1 范数对噪声鲁邦
理论基础:
Translation averaging 在global sfm 中计算困难,原因如下:
1、 两视图之间的运动不能恢复尺度(tvec 是从本质矩阵中恢复出来的,但是本质矩阵的秩是5,不包含尺度,所以global sfm 是属于三焦张量问题,即是至少tack 3帧才能进行运算。同时,global sfm 容易出现退化现象,当相机都处于同一条线上时候,对于无人机图像来说,这个时候轨迹就会出现bending map。
解决bending map 的手段有三点:
(1)提前对相机标定
(2)以无人机为例,飞行航线不要在恒定高度上飞行
(3)融合其他传感器,如gps 位置约束等
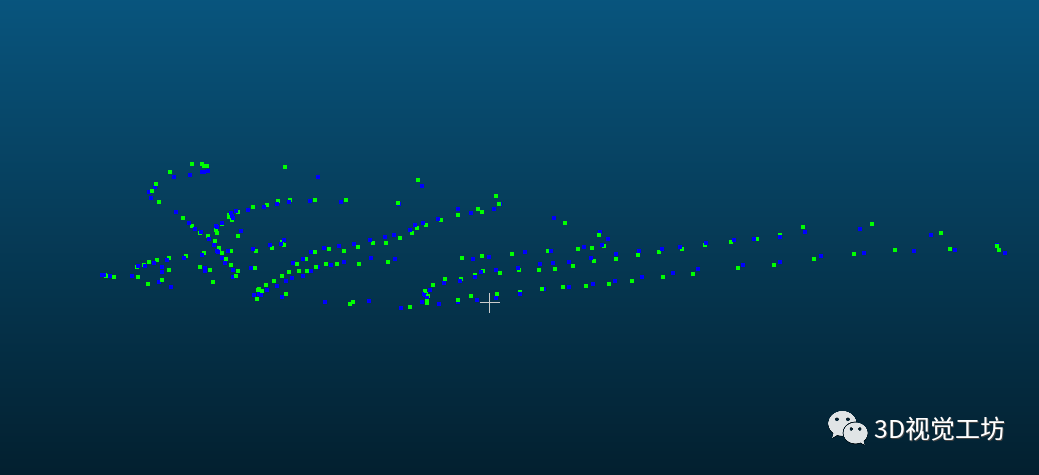
退化的case 如下:
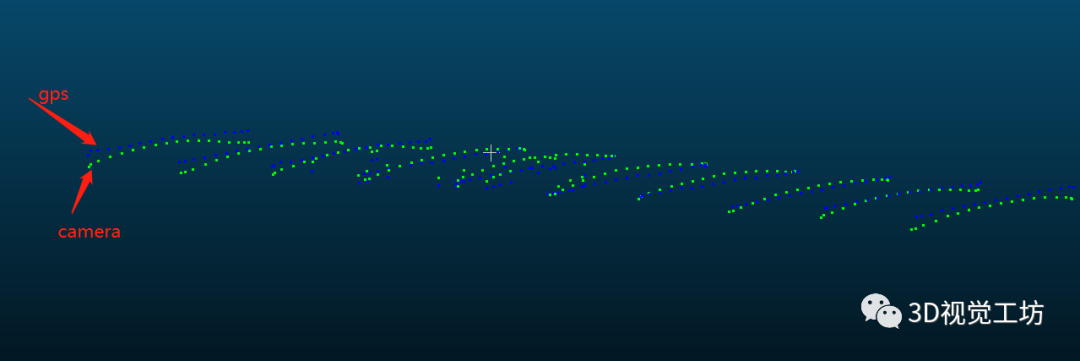
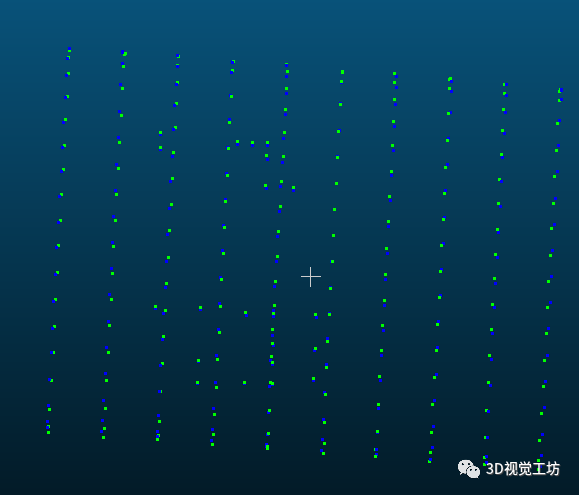
以上分别为侧面图和俯视图
以上结果是fusion low-cost gps的效果,但是依旧可以看出有弯曲的现象(不融合的效果特别差)
飞行方式改变,fusion low-cost gps,退化现象消失,如下:
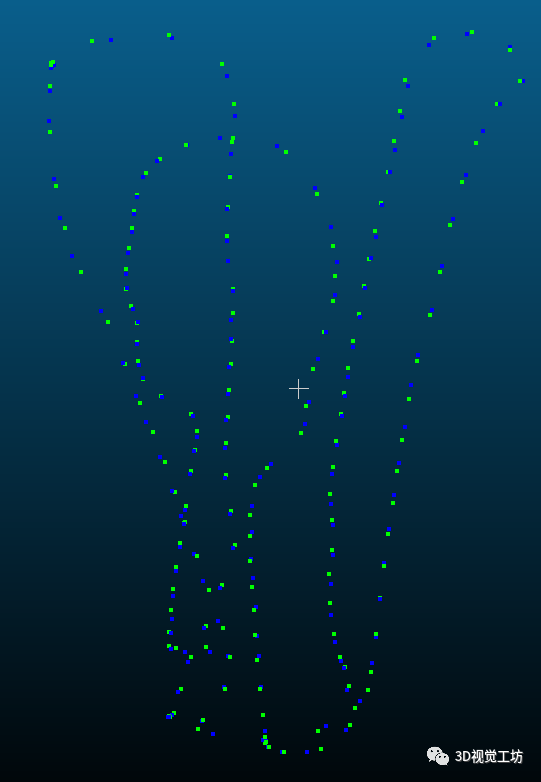
从侧面图和俯视图可以看出,当飞行方式发生改变,global sfm 退化现象消失。
2、 global sfm translation averaging第二个的痛点是对噪声敏感,其不像Incremental sfm,不断的ransac 和local ba 来减少bad EGs的影响。
如何去改善global sfm 的鲁棒性:
1)如果rotation 是已知的(不够精确),提供global rotation初始值给global sfm pipeline ,利用这些初始值在BA中增加relative rotation constraint
2)如果位置已知,sfm 增加位置约束,即最小化先验位置和估计的位置之间的gap,位置约束可以替代slam回环(如果是low cost gps ,位置约束不能保证精度,但可以起到一个control strcture 的作用(AR 常用)—参考vins-fusion思想 ,这个openmvg 中已经实现位置约束。
二、Incremental SfM workflow:

增量sfm这里不准备太多的叙述,需要注意的是初始化选择像对的基准:
enough matching
big baseline
三、global sfm和incremental sfm 优缺点和应用场景

应用场景:
1.当考虑速度不考虑精度的时候,并且当图像overlap 比较大的时候,用global sfm 可以达到理想效果,因为有更多的数据去average(Feature track based translation averaging)
2.如果考虑精度,选择Incremental sfm ,但是在大场景下,incremental sfm会随着图像的增多,速度越来越慢,同时由于误差的累计,会出现drfit ,这种情况下可以采用Distributed SfM。
参考文献 :
1.Rotation Averaging and Strong Duality[J].Anders Eriksson
2.Global Structure-from-Motion and Its Application[R]
3.Linear Global Translation Estimation with Feature Tracks[J].Zhaopeng Cui
本文仅做学术分享,如有侵权,请联系删文。
点击进入—>3D视觉工坊学习交流群
干货下载与学习
后台回复:巴塞罗那自治大学课件,即可下载国外大学沉淀数年3D Vison精品课件
后台回复:计算机视觉书籍,即可下载3D视觉领域经典书籍pdf
后台回复:3D视觉课程,即可学习3D视觉领域精品课程
3D视觉工坊精品课程官网:3dcver.com
1.面向自动驾驶领域的3D点云目标检测全栈学习路线!(单模态+多模态/数据+代码)
2.彻底搞透视觉三维重建:原理剖析、代码讲解、及优化改进
3.国内首个面向工业级实战的点云处理课程
4.激光-视觉-IMU-GPS融合SLAM算法梳理和代码讲解
5.彻底搞懂视觉-惯性SLAM:基于VINS-Fusion正式开课啦
6.彻底搞懂基于LOAM框架的3D激光SLAM: 源码剖析到算法优化
7.彻底剖析室内、室外激光SLAM关键算法原理、代码和实战(cartographer+LOAM +LIO-SAM)
16.透彻理解视觉ORB-SLAM3:理论基础+代码解析+算法改进
重磅!粉丝学习交流群已成立
交流群主要有3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、多传感器融合、CV入门、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、视觉竞赛、车牌识别、硬件选型、ORB-SLAM系列源码交流、深度估计、TOF、求职交流等方向。
扫描以下二维码,添加小助理微信(dddvisiona),一定要备注:研究方向+学校/公司+昵称,例如:”3D视觉 + 上海交大 + 静静“。请按照格式备注,可快速被通过且邀请进群。原创投稿也请联系。

▲长按加微信群或投稿,微信号:dddvisiona
3D视觉从入门到精通知识星球:针对3D视觉领域的视频课程(三维重建系列、三维点云系列、结构光系列、手眼标定、相机标定、激光/视觉SLAM、自动驾驶等)、源码分享、知识点汇总、入门进阶学习路线、最新paper分享、疑问解答等进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业为一体的铁杆粉丝聚集区,6000+星球成员为创造更好的AI世界共同进步,知识星球入口:
学习3D视觉核心技术,扫描查看,3天内无条件退款

高质量教程资料、答疑解惑、助你高效解决问题
觉得有用,麻烦给个赞和在看~
智能推荐
机器学习模型评分总结(sklearn)_model.score-程序员宅基地
文章浏览阅读1.5w次,点赞10次,收藏129次。文章目录目录模型评估评价指标1.分类评价指标acc、recall、F1、混淆矩阵、分类综合报告1.准确率方式一:accuracy_score方式二:metrics2.召回率3.F1分数4.混淆矩阵5.分类报告6.kappa scoreROC1.ROC计算2.ROC曲线3.具体实例2.回归评价指标3.聚类评价指标1.Adjusted Rand index 调整兰德系数2.Mutual Informa..._model.score
Apache虚拟主机配置mod_jk_apache mod_jk 虚拟-程序员宅基地
文章浏览阅读344次。因工作需要,在Apache上使用,重新学习配置mod_jk1. 分别安装Apache和Tomcat:2. 编辑httpd-vhosts.conf: LoadModule jk_module modules/mod_jk.so #加载mod_jk模块 JkWorkersFile conf/workers.properties #添加worker信息 JkLogFil_apache mod_jk 虚拟
Android ConstraintLayout2.0 过度动画MotionLayout MotionScene3_android onoffsetchanged-程序员宅基地
文章浏览阅读335次。待老夫kotlin大成,扩展:MotionLayout 与 CoordinatorLayout,DrawerLayout,ViewPager 的 交互众所周知,MotionLayout 的 动画是有完成度的 即Progress ,他在0-1之间变化,一.CoordinatorLayout 与AppBarLayout 交互时,其实就是监听 offsetliner 这个 偏移量的变化 同样..._android onoffsetchanged
【转】多核处理器的工作原理及优缺点_多核处理器怎么工作-程序员宅基地
文章浏览阅读8.3k次,点赞3次,收藏19次。【转】多核处理器的工作原理及优缺点《处理器关于多核概念与区别 多核处理器工作原理及优缺点》原文传送门 摘要:目前关于处理器的单核、双核和多核已经得到了普遍的运用,今天我们主要说说关于多核处理器的一些相关概念,它的工作与那里以及优缺点而展开的分析。1、多核处理器 多核处理器是指在一枚处理器中集成两个或多个完整的计算引擎(内核),此时处理器能支持系统总线上的多个处理器,由总..._多核处理器怎么工作
个人小结---eclipse/myeclipse配置lombok_eclispe每次运行个新项目都需要重新配置lombok吗-程序员宅基地
文章浏览阅读306次。1. eclipse配置lombok 拷贝lombok.jar到eclipse.ini同级文件夹下,编辑eclipse.ini文件,添加: -javaagent:lombok.jar2. myeclipse配置lombok myeclipse像eclipse配置后,定义对象后,直接访问方法,可能会出现飘红的报错。 如果出现报错,可按照以下方式解决。 ..._eclispe每次运行个新项目都需要重新配置lombok吗
【最新实用版】Python批量将pdf文本提取并存储到txt文件中_python批量读取文字并批量保存-程序员宅基地
文章浏览阅读1.2w次,点赞31次,收藏126次。#注意:笔者在2021/11/11当天调试过这个代码是可用的,由于pdfminer版本的更新,网络上大多数的语法没有更新,我也是找了好久的文章才修正了我的代码,仅供学习参考。1、把pdf文件移动到本代码文件的同一个目录下,笔者是在pycharm里面运行的项目,下图中的x1文件夹存储了我需要转换成文本文件的所有pdf文件。然后要在此目录下创建一个存放转换后的txt文件的文件夹,如图中的txt文件夹。2、编写代码 (1)导入所需库# coding:utf-8import ..._python批量读取文字并批量保存
随便推点
Scala:访问修饰符、运算符和循环_scala ===运算符-程序员宅基地
文章浏览阅读1.4k次。http://blog.csdn.net/pipisorry/article/details/52902234Scala 访问修饰符Scala 访问修饰符基本和Java的一样,分别有:private,protected,public。如果没有指定访问修饰符符,默认情况下,Scala对象的访问级别都是 public。Scala 中的 private 限定符,比 Java 更严格,在嵌套类情况下,外层_scala ===运算符
MySQL导出ER图为图片或PDF_数据库怎么导出er图-程序员宅基地
文章浏览阅读2.6k次,点赞7次,收藏19次。ER图导出为PDF或图片格式_数据库怎么导出er图
oracle触发器修改同一张表,oracle触发器中对同一张表进行更新再查询时,需加自制事务...-程序员宅基地
文章浏览阅读655次。CREATE OR REPLACE TRIGGER Trg_ReimFactBEFORE UPDATEON BP_OrderFOR EACH ROWDECLAREPRAGMA AUTONOMOUS_TRANSACTION;--自制事务fc varchar2(255);BEGINIF ( :NEW.orderstate = 2AND :NEW.TransState = 1 ) THENBEG..._oracle触发器更新同一张表
debounce与throttle区别及其应用场景_throttle和debounce应用在哪些场景-程序员宅基地
文章浏览阅读513次。目录概念debouncethrottle实现debouncethrottle应用场景debouncethrottle场景举例debouncethrottle概念debounce字面理解是“防抖”,何谓“防抖”,就是连续操作结束后再执行,以网页滚动为例,debounce要等到用户停止滚动后才执行,将连续多次执行合并为一次执行。throttle字面理解是“节流”,何谓“节流”,就是确保一段时..._throttle和debounce应用在哪些场景
java操作mongdb【超详细】_java 操作mongodb-程序员宅基地
文章浏览阅读526次。regex() $regex 正则表达式用于模式匹配,基本上是用于文档中的发现字符串 (下面有例子)注意:若未加 @Field("名称") ,则识别mongdb集合中的key名为实体类属性名。也可以对数组进行索引,如果被索引的列是数组时,MongoDB会索引这个数组中的每一个元素。也可以对整个Document进行索引,排序是预定义的按插入BSON数据的先后升序排列。save: 若新增数据的主键已经存在,则会对当前已经存在的数据进行修改操作。_java 操作mongodb
github push 推送代码失败. 使用ssh rsa key. remote: Support for password authentication was removed._git push remote: support for password authenticati-程序员宅基地
文章浏览阅读1k次。今天push代码到github仓库时出现这个报错TACKCHEN-MB0:tc-image tackchen$ git pushremote: Support for password authentication was removed on August 13, 2021. Please use a personal access token instead.remote: Please see https://github.blog/2020-12-15-token-authentication_git push remote: support for password authentication was removed on august 1