图像二值化(Image Binarization):平均值法、双峰法、大津算法(OTSU)_大津法-程序员宅基地
技术标签: 计算机视觉(CV方向) 计算机视觉 二值化 数字图像处理
图像二值化(Image Binarization):平均值法、双峰法、大津算法(OTSU)
编程实现图像的二值化,分析不同的阈值对二值化图像的影响。
问题描述
传统的机器视觉通常包括两个步骤:预处理和物体检测。而沟通二者的桥梁则是图像分割(Image Segmentation)。图像分割通过简化或改变图像的表示形式,使得图像更易于分析。最简单的图像分割方法是二值化(Binarization)。
图像二值化(Image Binarization)就是将图像上的像素点的灰度值设置为0或255,也就是将整个图像呈现出明显的黑白效果的过程。二值图像每个像素只有两种取值:要么纯黑,要么纯白。
由于二值图像数据足够简单,许多视觉算法都依赖二值图像。通过二值图像,能更好地分析物体的形状和轮廓。二值图像也常常用作原始图像的掩模(又称遮罩、蒙版,Mask):它就像一张部分镂空的纸,把我们不感兴趣的区域遮掉。进行二值化有多种方式,其中最常用的就是采用阈值法(Thresholding)进行二值化。其将大于某个临界灰度值的像素灰度设为灰度极大值,小于这个值的为灰度极小值,从而实现二值化。
阈值法又分为全局阈值(Global Method)和局部阈值(Local Method),又称自适应阈值(Adaptive Thresholding)。本次实验主要实现全局阈值,阈值的选取基于以下三种方法:
- 平均值法
- 双峰法
- OTSU法
平均值法
为了应对每张图片的灰度值大不相同,阈值取为图像本身的平均值.
import cv2
import numpy as np
import matplotlib.pyplot as plt
img_name0 = 'lena_gray.bmp'
img0 = cv2.imread(img_name0)
plt.imshow(img0)
plt.show()

def mean_binarization(img):
img_gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
threshold = np.mean(img_gray)
img_gray[img_gray>threshold] = 255
img_gray[img_gray<=threshold] = 0
# For displaying a grayscale image set up the colormapping using the parameters cmap='gray', vmin=0, vmax=255.
plt.imshow(img_gray, cmap='gray')
plt.show()
return img_gray
img_gray0 = mean_binarization(img0)

双峰法
如果物体与背景的灰度值对比明显,直方图就会包含双峰(bimodal histogram),它们分别为图像的前景和背景。而它们之间的谷底即为边缘附近相对较少数目的像素点,一般来讲,这个最小值就为最优二值化的分界点,通过这个点可以把前景和背景很好地分开。
from collections import Counter
def hist_binarization(img):
img_gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
hist = img_gray.flatten()
plt.subplot(121)
plt.hist(hist, 256)
cnt_hist = Counter(hist)
most_commons = cnt_hist.most_common(2)
# get the grey values of bimodal histogram
begin, end = most_commons[0][0], most_commons[1][0]
if begin > end:
begin, end = end, begin
print(f'{
begin}: {
end}')
cnt = np.iinfo(np.int16).max
threshold = 0
for i in range(begin, end+1):
if cnt_hist[i] < cnt:
cnt = cnt_hist[i]
threshold = i
print(f'{
threshold}: {
cnt}')
img_gray[img_gray>threshold] = 255
img_gray[img_gray<=threshold] = 0
plt.subplot(122)
plt.imshow(img_gray, cmap='gray')
plt.show()
return img_gray
img_gray1 = hist_binarization(img0)

上述直方图两峰值没有间距,故未能较好体现双峰法的作用.
OTSU法
不难发现,上述双峰法具有明显的缺陷,因为直方图是不连续的,有非常多尖峰和抖动,要找到准确的极值点十分困难。日本工程师大津展之为这个波谷找到了一个合适的数学表达,并于1979年发表。这个二值化方法称为大津算法(Otsu’s method)。
从大津法的原理上来讲,该方法又称作最大类间方差法,因为按照大津法求得的阈值进行图像二值化分割后,前景与背景图像的类间方差最大。它被认为是图像分割中阈值选取的最佳算法,计算简单,不受图像亮度和对比度的影响,因此在数字图像处理上得到了广泛的应用。它是按图像的灰度特性,将图像分成背景和前景两部分。因方差是灰度分布均匀性的一种度量,背景和前景之间的类间方差越大,说明构成图像的两部分的差别越大,当部分前景错分为背景或部分背景错分为前景都会导致类间差别变小。因此,使类间方差最大的分割意味着错分概率最小。
优化目标
k ∗ = arg max k ∈ L σ 2 k^* = \mathop { \arg \max } \limits _{k\in L} \sigma ^2 k∗=k∈Largmaxσ2
σ 2 = ( M G ∗ p 1 − m ) 2 p 1 ( 1 − p 1 ) \sigma ^2 = \frac{(MG*p1-m)^2}{p1(1-p1)} σ2=p1(1−p1)(MG∗p1−m)2
推导
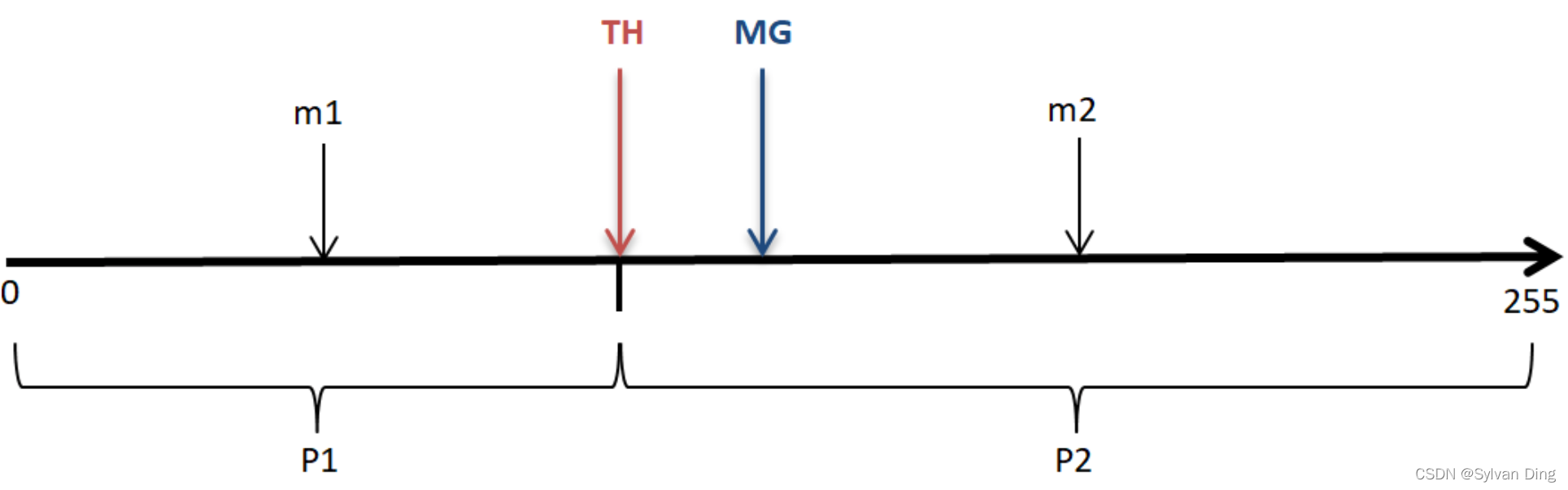
由所选定的阈值 k k k 将所有像素分为两类 C1( 小于等于 k k k ) 和 C2(大于 k k k ),两类像素的均值分别为 m 1 m1 m1、 m 2 m2 m2,全局均值为 M G MG MG.属于 C1、C2 的概率分别为 p 1 p1 p1、 p 2 p2 p2. L 是图像的像素级(0~255)
根据方差定义,得到
σ 2 = p 1 ( m 1 − M G ) 2 + p 2 ( m 2 − M G ) 2 \sigma ^2 = p1(m1-MG)^2 + p2(m2-MG)^2 σ2=p1(m1−MG)2+p2(m2−MG)2
又
p 1 ∗ m 1 + p 2 ∗ m 2 = M G p1*m1+p2*m2=MG p1∗m1+p2∗m2=MG
p 1 + p 2 = 1 p1+p2=1 p1+p2=1
其中,
p 1 = ∑ i = 0 k p i p1=\sum _{i=0} ^k p_i p1=i=0∑kpi
m 1 = ∑ i = 0 k i p i p 1 m1 = \frac{\sum _{i=0} ^k ip_i}{p1} m1=p1∑i=0kipi
m 2 = ∑ i = k + 1 L i p i p 2 m2 = \frac{\sum _{i=k+1} ^L ip_i}{p2} m2=p2∑i=k+1Lipi
p i p_i pi 是灰度值为 i 的像素点出现的频率(或概率)
则
σ 2 = p 1 p 2 ( m 1 − m 2 ) 2 \sigma ^2 = p1p2(m1-m2)^2 σ2=p1p2(m1−m2)2.
进一步化简上式,
M G = ∑ i = 0 L i p i MG=\sum _{i=0} ^{L} ip_i MG=i=0∑Lipi
m = ∑ i = 0 k i p i m=\sum _{i=0} ^{k} ip_i m=i=0∑kipi
其中, m m m 是灰度阈值 k k k 的累加均值(相对整张图片而言的均值,而 m1 是 C1 类的类内均值), M G MG MG 是全局均值,和前文所述一致,则
m 1 = m p 1 m1=\frac{m}{p1} m1=p1m
m 2 = M G − m p 2 m2=\frac{MG-m}{p2} m2=p2MG−m
由此可的最终的类间方差公式:
σ 2 = ( M G ∗ p 1 − m ) 2 p 1 ( 1 − p 1 ) \sigma ^2 = \frac{(MG*p1-m)^2}{p1(1-p1)} σ2=p1(1−p1)(MG∗p1−m)2
def otsu(img):
img_gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
h, w = img_gray.shape[:2]
pixel = h * w
threshold_k = 0
max_var = .0
for k in range(255):
c1 = img_gray[img_gray <= k]
p1 = len(c1) / pixel
if p1 == 0:
continue
elif p1 == 1:
break
MG = np.sum(img_gray) / pixel
m = np.sum(c1) / pixel
d = (MG*p1 - m) ** 2 / (p1 * (1 - p1))
if d > max_var:
max_var = d
threshold_k = k
img_gray[img_gray <= threshold_k] = 0
img_gray[img_gray > threshold_k] = 255
print(f"{
threshold_k}")
plt.imshow(img_gray, cmap='gray')
plt.show()
return img_gray
img_gray2 = otsu(img0)

结果分析
OTSU算法得到的阈值产生了比上述两者都好的分割效果,其按图像的灰度特性,将Lena分成背景和前景两部分,接着遍历阈值,找到使得前景、背景二类间方差最大的阈值,作为二值化的阈值.
️Sylvan Ding 转载注明出处!
参考文献
智能推荐
hive使用适用场景_大数据入门:Hive应用场景-程序员宅基地
文章浏览阅读5.8k次。在大数据的发展当中,大数据技术生态的组件,也在不断地拓展开来,而其中的Hive组件,作为Hadoop的数据仓库工具,可以实现对Hadoop集群当中的大规模数据进行相应的数据处理。今天我们的大数据入门分享,就主要来讲讲,Hive应用场景。关于Hive,首先需要明确的一点就是,Hive并非数据库,Hive所提供的数据存储、查询和分析功能,本质上来说,并非传统数据库所提供的存储、查询、分析功能。Hive..._hive应用场景
zblog采集-织梦全自动采集插件-织梦免费采集插件_zblog 网页采集插件-程序员宅基地
文章浏览阅读496次。Zblog是由Zblog开发团队开发的一款小巧而强大的基于Asp和PHP平台的开源程序,但是插件市场上的Zblog采集插件,没有一款能打的,要么就是没有SEO文章内容处理,要么就是功能单一。很少有适合SEO站长的Zblog采集。人们都知道Zblog采集接口都是对Zblog采集不熟悉的人做的,很多人采取模拟登陆的方法进行发布文章,也有很多人直接操作数据库发布文章,然而这些都或多或少的产生各种问题,发布速度慢、文章内容未经严格过滤,导致安全性问题、不能发Tag、不能自动创建分类等。但是使用Zblog采._zblog 网页采集插件
Flink学习四:提交Flink运行job_flink定时运行job-程序员宅基地
文章浏览阅读2.4k次,点赞2次,收藏2次。restUI页面提交1.1 添加上传jar包1.2 提交任务job1.3 查看提交的任务2. 命令行提交./flink-1.9.3/bin/flink run -c com.qu.wc.StreamWordCount -p 2 FlinkTutorial-1.0-SNAPSHOT.jar3. 命令行查看正在运行的job./flink-1.9.3/bin/flink list4. 命令行查看所有job./flink-1.9.3/bin/flink list --all._flink定时运行job
STM32-LED闪烁项目总结_嵌入式stm32闪烁led实验总结-程序员宅基地
文章浏览阅读1k次,点赞2次,收藏6次。这个项目是基于STM32的LED闪烁项目,主要目的是让学习者熟悉STM32的基本操作和编程方法。在这个项目中,我们将使用STM32作为控制器,通过对GPIO口的控制实现LED灯的闪烁。这个STM32 LED闪烁的项目是一个非常简单的入门项目,但它可以帮助学习者熟悉STM32的编程方法和GPIO口的使用。在这个项目中,我们通过对GPIO口的控制实现了LED灯的闪烁。LED闪烁是STM32入门课程的基础操作之一,它旨在教学生如何使用STM32开发板控制LED灯的闪烁。_嵌入式stm32闪烁led实验总结
Debezium安装部署和将服务托管到systemctl-程序员宅基地
文章浏览阅读63次。本文介绍了安装和部署Debezium的详细步骤,并演示了如何将Debezium服务托管到systemctl以进行方便的管理。本文将详细介绍如何安装和部署Debezium,并将其服务托管到systemctl。解压缩后,将得到一个名为"debezium"的目录,其中包含Debezium的二进制文件和其他必要的资源。注意替换"ExecStart"中的"/path/to/debezium"为实际的Debezium目录路径。接下来,需要下载Debezium的压缩包,并将其解压到所需的目录。
Android 控制屏幕唤醒常亮或熄灭_android实现拿起手机亮屏-程序员宅基地
文章浏览阅读4.4k次。需求:在诗词曲文项目中,诗词整篇朗读的时候,文章没有读完会因为屏幕熄灭停止朗读。要求:在文章没有朗读完毕之前屏幕常亮,读完以后屏幕常亮关闭;1.权限配置:设置电源管理的权限。
随便推点
目标检测简介-程序员宅基地
文章浏览阅读2.3k次。目标检测简介、评估标准、经典算法_目标检测
记SQL server安装后无法连接127.0.0.1解决方法_sqlserver 127 0 01 无法连接-程序员宅基地
文章浏览阅读6.3k次,点赞4次,收藏9次。实训时需要安装SQL server2008 R所以我上网上找了一个.exe 的安装包链接:https://pan.baidu.com/s/1_FkhB8XJy3Js_rFADhdtmA提取码:ztki注:解压后1.04G安装时Microsoft需下载.NET,更新安装后会自动安装如下:点击第一个傻瓜式安装,唯一注意的是在修改路径的时候如下不可修改:到安装实例的时候就可以修改啦数据..._sqlserver 127 0 01 无法连接
js 获取对象的所有key值,用来遍历_js 遍历对象的key-程序员宅基地
文章浏览阅读7.4k次。1. Object.keys(item); 获取到了key之后就可以遍历的时候直接使用这个进行遍历所有的key跟valuevar infoItem={ name:'xiaowu', age:'18',}//的出来的keys就是[name,age]var keys=Object.keys(infoItem);2. 通常用于以下实力中 <div *ngFor="let item of keys"> <div>{{item}}.._js 遍历对象的key
粒子群算法(PSO)求解路径规划_粒子群算法路径规划-程序员宅基地
文章浏览阅读2.2w次,点赞51次,收藏310次。粒子群算法求解路径规划路径规划问题描述 给定环境信息,如果该环境内有障碍物,寻求起始点到目标点的最短路径, 并且路径不能与障碍物相交,如图 1.1.1 所示。1.2 粒子群算法求解1.2.1 求解思路 粒子群优化算法(PSO),粒子群中的每一个粒子都代表一个问题的可能解, 通过粒子个体的简单行为,群体内的信息交互实现问题求解的智能性。 在路径规划中,我们将每一条路径规划为一个粒子,每个粒子群群有 n 个粒 子,即有 n 条路径,同时,每个粒子又有 m 个染色体,即中间过渡点的_粒子群算法路径规划
量化评价:稳健的业绩评价指标_rar 海龟-程序员宅基地
文章浏览阅读353次。所谓稳健的评估指标,是指在评估的过程中数据的轻微变化并不会显著的影响一个统计指标。而不稳健的评估指标则相反,在对交易系统进行回测时,参数值的轻微变化会带来不稳健指标的大幅变化。对于不稳健的评估指标,任何对数据有影响的因素都会对测试结果产生过大的影响,这很容易导致数据过拟合。_rar 海龟
IAP在ARM Cortex-M3微控制器实现原理_value line devices connectivity line devices-程序员宅基地
文章浏览阅读607次,点赞2次,收藏7次。–基于STM32F103ZET6的UART通讯实现一、什么是IAP,为什么要IAPIAP即为In Application Programming(在应用中编程),一般情况下,以STM32F10x系列芯片为主控制器的设备在出厂时就已经使用J-Link仿真器将应用代码烧录了,如果在设备使用过程中需要进行应用代码的更换、升级等操作的话,则可能需要将设备返回原厂并拆解出来再使用J-Link重新烧录代码,这就增加了很多不必要的麻烦。站在用户的角度来说,就是能让用户自己来更换设备里边的代码程序而厂家这边只需要提供给_value line devices connectivity line devices