无迹卡尔曼滤波详细介绍及仿真-程序员宅基地
技术标签: 算法
0 前言
著名学者Julier等提出近似非线性函数的均值和方差远比近似非线性函数本身更容易,因此提出了基于确定性采样的UKF算法。
该算法的核心思想是:采用UT变换,利用一组Sigma采样点来描述随机变量的高斯分布,然后通过非线性函数的传递,再利用加权统计线性回归技术来近似非x线性函数的后验均值和方差。
相比于EKF,UKF的估计精度能够达到泰勒级数展开的二阶精度。
1 UT变换

2 采样策略
根据Sigma点采样策略不同,相应的Sigma点以及均值权值和方差权值也不尽相同,因此UT变换的估计精度也会有差异,但总体来说,其估计精度能够达到泰勒级数展开的二阶精度。
为保证随机变量x经过采样之后得到的Sigma采样点仍具有原变量的必要特性,所以采样点的选取应满足:
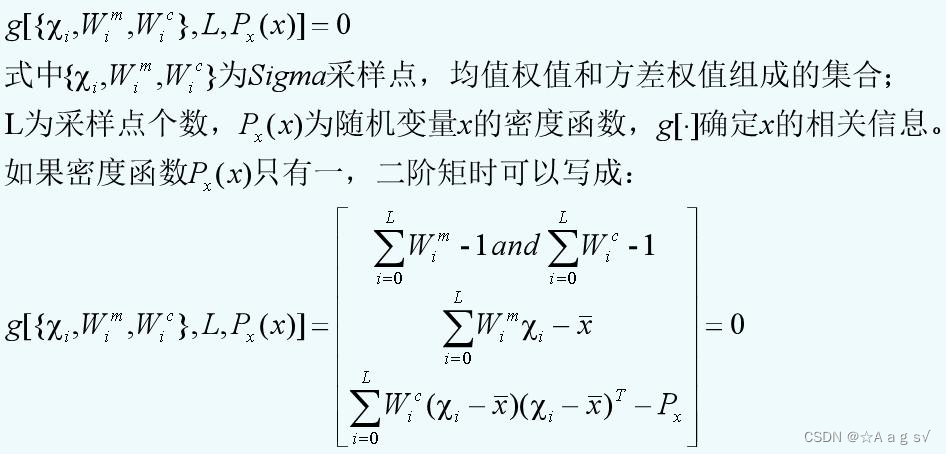
下面介绍两种常用的策略:比例采样和比例修正对称采样:
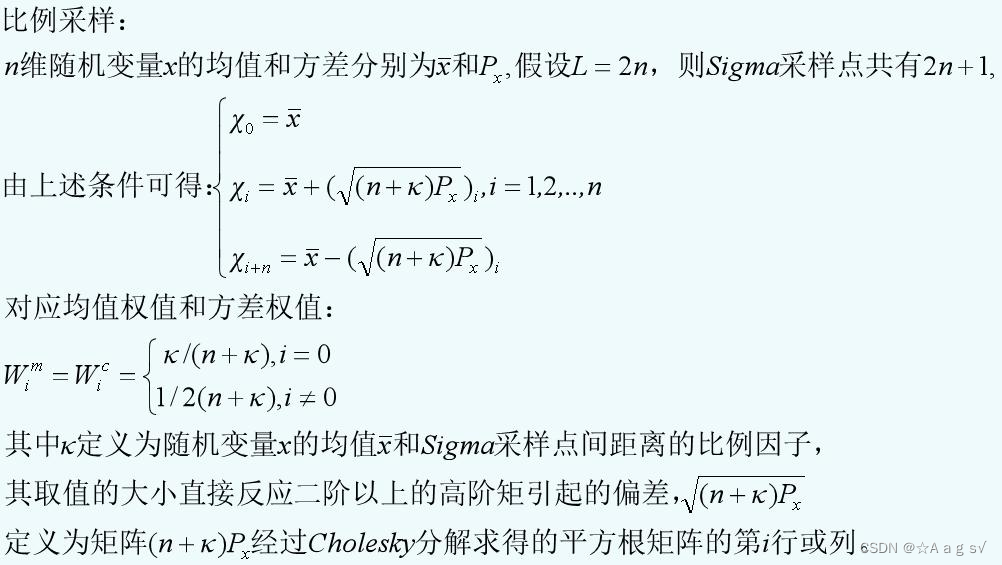
比例采样:
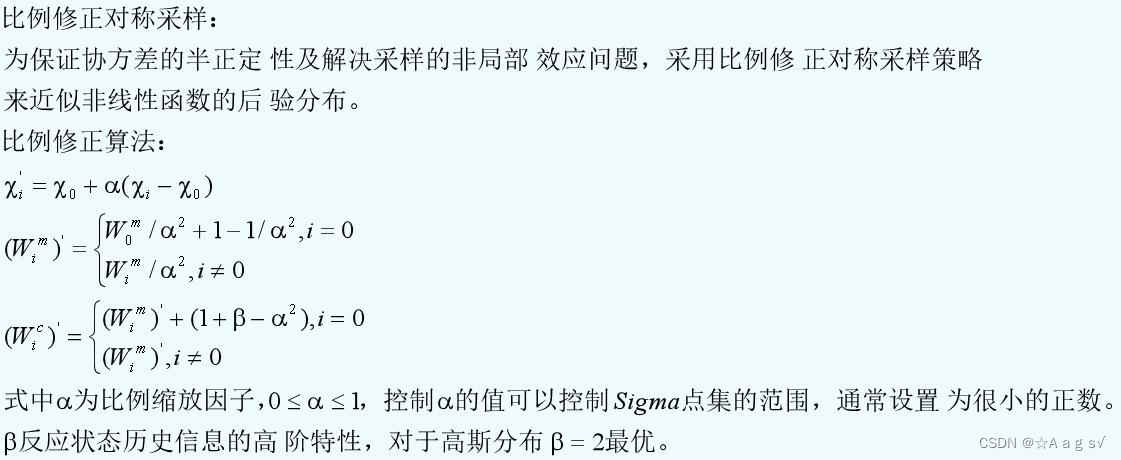
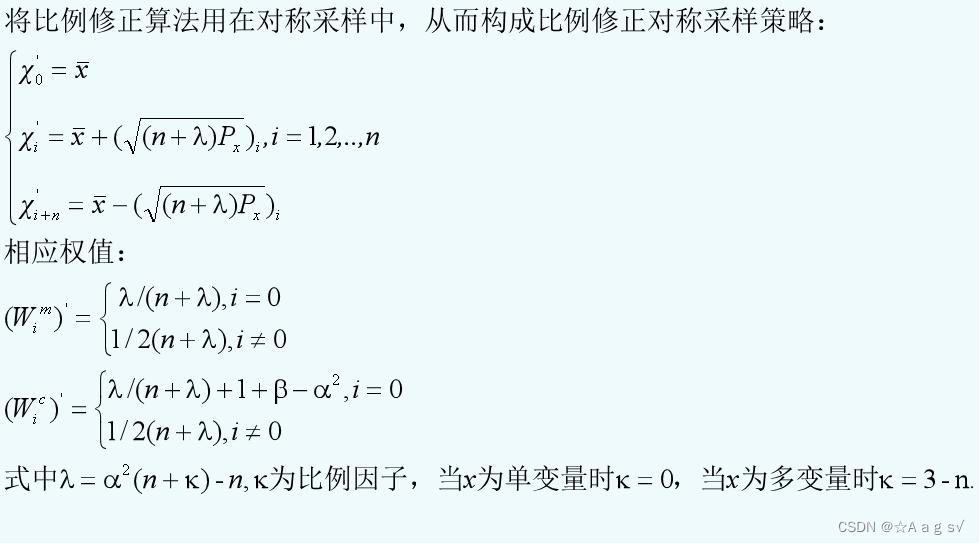
比例修正对称采样:
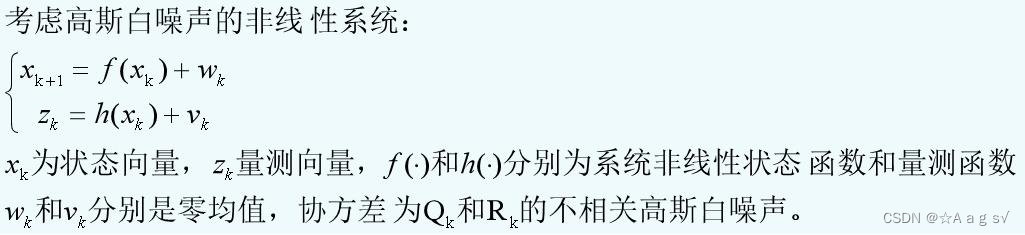
高斯白噪声非线性系统:
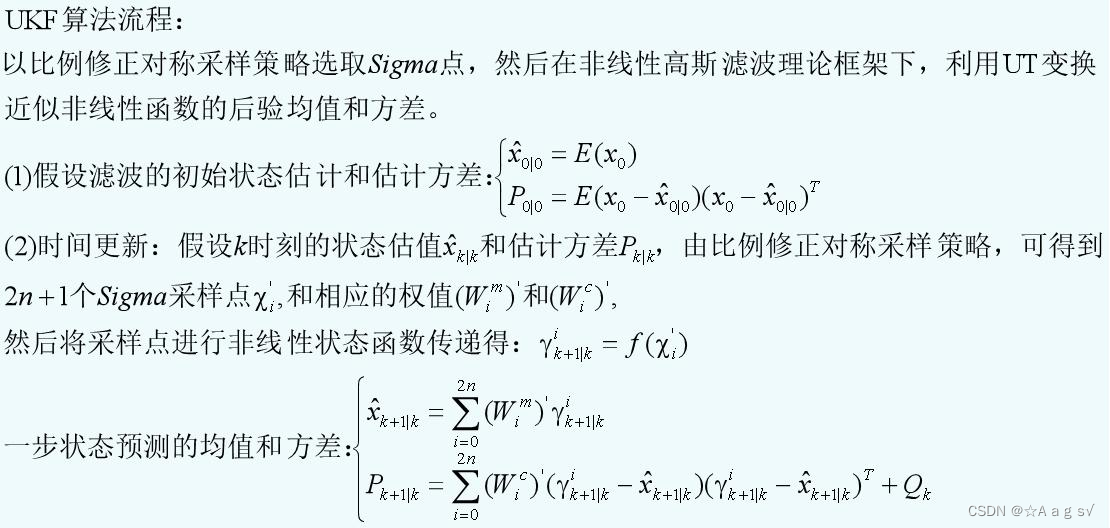
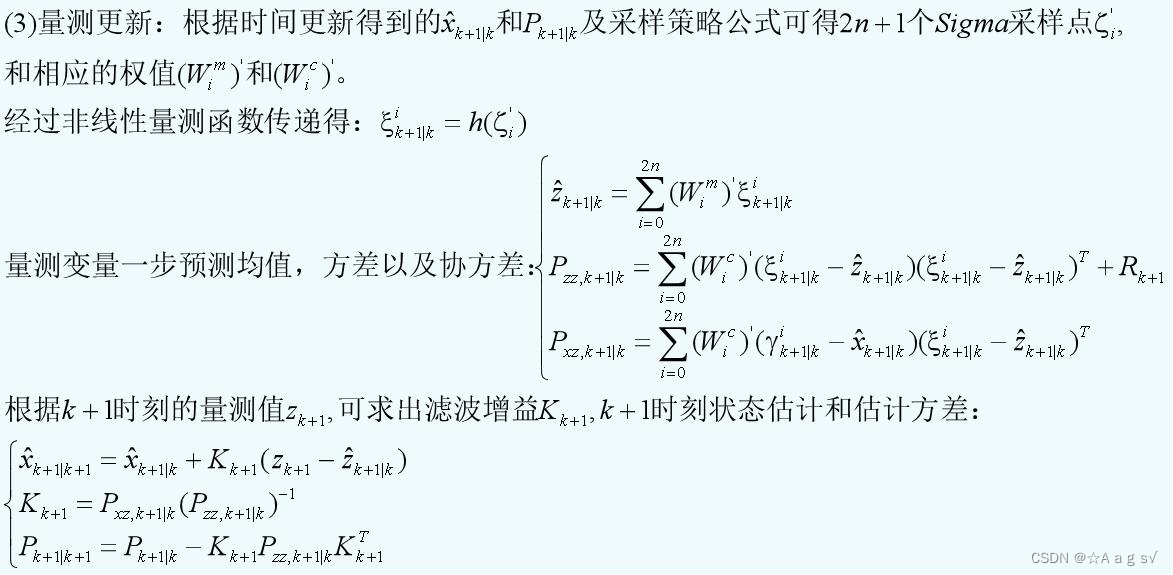
3 UKF算法流程
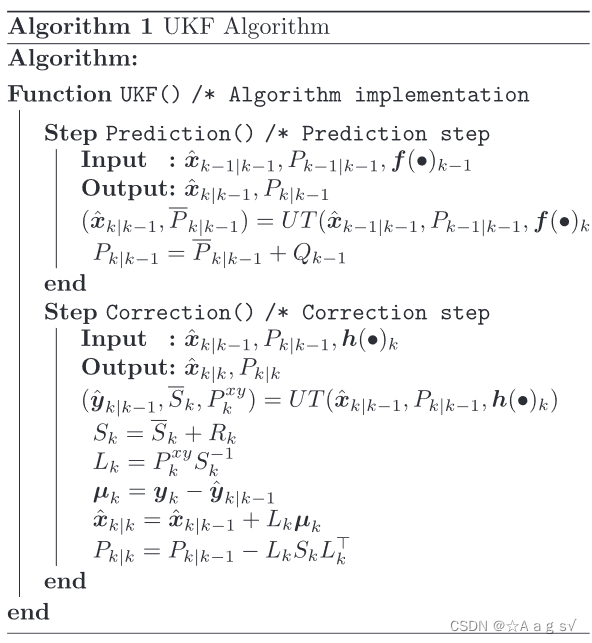
4 另一种UKF算法流程
5 UKF算法仿真
clc;close all;clear all;
rng(4); % 固定随机种子
n=6; % 6维
t=0.2;
q=0.1; %std of process
r=0.7; %std of measurement
Q=q^2*eye(n); % covariance of process
R=r^2; % covariance of measurement
f=@(x)[x(1)*x(2);t*x(3);0.05*x(1)*t*(x(2)+x(3));x(4)+t*x(6);x(5);x(6)]; % nonlinear state equations
%f=@(x)[x(1)+t*x(3);x(2)+t*x(4);x(3)+t*x(5);x(4)+t*x(6);x(5);x(6)]; % nonlinear state equations
h=@(x)[sqrt(x(1)+1);0.8*x(2)+0.3*x(1);x(3);x(4);x(5);x(6)]; % measurement equation
s=[0.3;0.2;1;2;2;-1]; % initial state
x=s+q*randn(n,1); %initial state % initial state with noise
P = eye(n); % initial state covraiance
N=50; % total dynamic steps
xV = zeros(n,N); %estmate % allocate memory
sV = zeros(n,N); %actual
zV = zeros(n,N);
for k=1:N
z = h(s) + r*randn; % measurments 广播
zV(:,k) = z; % save measurment
sV(:,k)= s; % save actual state
s = f(s) + q*randn(n,1); % update process
[x, P] = ukf(f,x,P,h,z,Q,R); % ukf
xV(:,k) = x; % save estimate
end
for k=1:n % plot results
subplot(n,1,k)
plot(1:N, sV(k,:), '-', 1:N, xV(k,:), '--',1:N,zV(k,:),'*')
end
function [y,Y,P,Y1] = ut(f,X,Wm,Wc,n,Q)
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Unscented Transformation
% UT转换函数
% Input:
% f: nonlinear map 跑观测方程是h
% X: sigma points
% Wm: weights for mean
% Wc: weights for covraiance
% n: numer of outputs of f
% Q: additive covariance 跑观测方程是R
% Output:
% y: transformed mean
% Y: transformed smapling points
% P: transformed covariance
% Y1: transformed deviations(偏差)
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
L = size(X,2);
y = zeros(n,1);
Y = zeros(n,L);
for k=1:L
Y(:,k) = f(X(:,k));
y = y+Wm(k)*Y(:,k);
end
Y1 = Y-y(:,ones(1,L)); % 广播
P = Y1*diag(Wc)*Y1'+Q;
end
function [x,P] = ukf(f_func, x, P, h_func, z, Q, R)
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% UKF Unscented Kalman Filter for nonlinear dynamic systems
% 无损卡尔曼滤波(Unscented Kalman Filter)函数,适用于动态非线性系统
% for nonlinear dynamic system (noises are assumed as additive):
% x_k+1 = f(x_k) + w_k
% z_k = h(x_k) + v_k
% w ~ N(0,Q) meaning w is gaussian noise with covariance Q
% v ~ N(0,R) meaning v is gaussian noise with covariance R
% =============================参数说明=================================
% Inputs:
% fstate -[function]: 状态方程f(x)
% x - [vec]: 状态先验估计 "a priori" state estimate
% P - [mat]: 方差先验估计 "a priori" estimated state covariance
% hmeas -[function]: 量测方程h(x)
% z - [vec]: 量测数据 current measurement
% Q - [mat]: 状态方程噪声w(t) process noise covariance
% R - [mat]: 量测方程噪声v(t) measurement noise covariance
% Output:
% x - [mat]: 状态后验估计 "a posteriori" state estimate
% P - [mat]: 方差后验估计 "a posteriori" state covariance
% =====================================================================
% By Yi Cao at Cranfield University, 04/01/2008
% Modified by JD Liu 2010-4-20
% Modified by zhangwenyu, 12/23/2013
% Modified by yangkunfeng, 2022-8-23
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
if nargin<7
error('Not enough inputarguments!');
end
% 初始化,为了简化函数,求lamda的过程被默认
n_x = numel(x); %numer of states
n_z = numel(z); %numer of measurements
alpha = 1e-3; %default, tunable
kappa = 0; %default, tunable
beta = 2; %default, tunable
% UT转换部分
lambda = alpha^2*(n_x+kappa)-n_x; %scaling factor
c = n_x+lambda; %scaling factor
Wm = [lambda/c 0.5/c+zeros(1,2*n_x)]; %weights for means 广播
Wc = Wm;
Wc(1) = Wc(1)+(1-alpha^2+beta); %weights for covariance
X = sigmas(x,P,c); %sigma points around x
[x1,X1,P_X1,err_X1] = ut(f_func,X,Wm,Wc,n_x,Q);%unscented transformation of process
% X1=sigmas(x1,P_X1,c); %sigma points around x1
% X2=X1-x1(:,ones(1,size(X1,2))); %deviation of X1
[z1,Z1,P_Z1,err_Z1] = ut(h_func,X1,Wm,Wc,n_z,R);%unscented transformation of measurments
% 滤波部分
P_X1_Z1 = err_X1*diag(Wc)*err_Z1'; %transformed cross-covariance %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
K = P_X1_Z1*inv(P_Z1); % 计算增益
x = x1+K*(z-z1); %state update x1是ut变换之后状态的先验
P = P_X1-K*P_X1_Z1'; % P = P_X1-K*P_Z1*K' %covariance update P1是ut变换之后状态和状态先验,P是后验
end
function X = sigmas(x,P,c)
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Sigma points around reference point
% 构造2n+1个sigma点
% Inputs:
% x: reference point
% P: covariance
% c: coefficient
% Output:
% X: Sigma points
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
A = sqrt(c)*chol(P)';
Y = x(:,ones(1,numel(x)));
X = [x Y+A Y-A];
end
仿真结果

智能推荐
稀疏编码的数学基础与理论分析-程序员宅基地
文章浏览阅读290次,点赞8次,收藏10次。1.背景介绍稀疏编码是一种用于处理稀疏数据的编码技术,其主要应用于信息传输、存储和处理等领域。稀疏数据是指数据中大部分元素为零或近似于零的数据,例如文本、图像、音频、视频等。稀疏编码的核心思想是将稀疏数据表示为非零元素和它们对应的位置信息,从而减少存储空间和计算复杂度。稀疏编码的研究起源于1990年代,随着大数据时代的到来,稀疏编码技术的应用范围和影响力不断扩大。目前,稀疏编码已经成为计算...
EasyGBS国标流媒体服务器GB28181国标方案安装使用文档-程序员宅基地
文章浏览阅读217次。EasyGBS - GB28181 国标方案安装使用文档下载安装包下载,正式使用需商业授权, 功能一致在线演示在线API架构图EasySIPCMSSIP 中心信令服务, 单节点, 自带一个 Redis Server, 随 EasySIPCMS 自启动, 不需要手动运行EasySIPSMSSIP 流媒体服务, 根..._easygbs-windows-2.6.0-23042316使用文档
【Web】记录巅峰极客2023 BabyURL题目复现——Jackson原生链_原生jackson 反序列化链子-程序员宅基地
文章浏览阅读1.2k次,点赞27次,收藏7次。2023巅峰极客 BabyURL之前AliyunCTF Bypassit I这题考查了这样一条链子:其实就是Jackson的原生反序列化利用今天复现的这题也是大同小异,一起来整一下。_原生jackson 反序列化链子
一文搞懂SpringCloud,详解干货,做好笔记_spring cloud-程序员宅基地
文章浏览阅读734次,点赞9次,收藏7次。微服务架构简单的说就是将单体应用进一步拆分,拆分成更小的服务,每个服务都是一个可以独立运行的项目。这么多小服务,如何管理他们?(服务治理 注册中心[服务注册 发现 剔除])这么多小服务,他们之间如何通讯?这么多小服务,客户端怎么访问他们?(网关)这么多小服务,一旦出现问题了,应该如何自处理?(容错)这么多小服务,一旦出现问题了,应该如何排错?(链路追踪)对于上面的问题,是任何一个微服务设计者都不能绕过去的,因此大部分的微服务产品都针对每一个问题提供了相应的组件来解决它们。_spring cloud
Js实现图片点击切换与轮播-程序员宅基地
文章浏览阅读5.9k次,点赞6次,收藏20次。Js实现图片点击切换与轮播图片点击切换<!DOCTYPE html><html> <head> <meta charset="UTF-8"> <title></title> <script type="text/ja..._点击图片进行轮播图切换
tensorflow-gpu版本安装教程(过程详细)_tensorflow gpu版本安装-程序员宅基地
文章浏览阅读10w+次,点赞245次,收藏1.5k次。在开始安装前,如果你的电脑装过tensorflow,请先把他们卸载干净,包括依赖的包(tensorflow-estimator、tensorboard、tensorflow、keras-applications、keras-preprocessing),不然后续安装了tensorflow-gpu可能会出现找不到cuda的问题。cuda、cudnn。..._tensorflow gpu版本安装
随便推点
物联网时代 权限滥用漏洞的攻击及防御-程序员宅基地
文章浏览阅读243次。0x00 简介权限滥用漏洞一般归类于逻辑问题,是指服务端功能开放过多或权限限制不严格,导致攻击者可以通过直接或间接调用的方式达到攻击效果。随着物联网时代的到来,这种漏洞已经屡见不鲜,各种漏洞组合利用也是千奇百怪、五花八门,这里总结漏洞是为了更好地应对和预防,如有不妥之处还请业内人士多多指教。0x01 背景2014年4月,在比特币飞涨的时代某网站曾经..._使用物联网漏洞的使用者
Visual Odometry and Depth Calculation--Epipolar Geometry--Direct Method--PnP_normalized plane coordinates-程序员宅基地
文章浏览阅读786次。A. Epipolar geometry and triangulationThe epipolar geometry mainly adopts the feature point method, such as SIFT, SURF and ORB, etc. to obtain the feature points corresponding to two frames of images. As shown in Figure 1, let the first image be and th_normalized plane coordinates
开放信息抽取(OIE)系统(三)-- 第二代开放信息抽取系统(人工规则, rule-based, 先抽取关系)_语义角色增强的关系抽取-程序员宅基地
文章浏览阅读708次,点赞2次,收藏3次。开放信息抽取(OIE)系统(三)-- 第二代开放信息抽取系统(人工规则, rule-based, 先关系再实体)一.第二代开放信息抽取系统背景 第一代开放信息抽取系统(Open Information Extraction, OIE, learning-based, 自学习, 先抽取实体)通常抽取大量冗余信息,为了消除这些冗余信息,诞生了第二代开放信息抽取系统。二.第二代开放信息抽取系统历史第二代开放信息抽取系统着眼于解决第一代系统的三大问题: 大量非信息性提取(即省略关键信息的提取)、_语义角色增强的关系抽取
10个顶尖响应式HTML5网页_html欢迎页面-程序员宅基地
文章浏览阅读1.1w次,点赞6次,收藏51次。快速完成网页设计,10个顶尖响应式HTML5网页模板助你一臂之力为了寻找一个优质的网页模板,网页设计师和开发者往往可能会花上大半天的时间。不过幸运的是,现在的网页设计师和开发人员已经开始共享HTML5,Bootstrap和CSS3中的免费网页模板资源。鉴于网站模板的灵活性和强大的功能,现在广大设计师和开发者对html5网站的实际需求日益增长。为了造福大众,Mockplus的小伙伴整理了2018年最..._html欢迎页面
计算机二级 考试科目,2018全国计算机等级考试调整,一、二级都增加了考试科目...-程序员宅基地
文章浏览阅读282次。原标题:2018全国计算机等级考试调整,一、二级都增加了考试科目全国计算机等级考试将于9月15-17日举行。在备考的最后冲刺阶段,小编为大家整理了今年新公布的全国计算机等级考试调整方案,希望对备考的小伙伴有所帮助,快随小编往下看吧!从2018年3月开始,全国计算机等级考试实施2018版考试大纲,并按新体系开考各个考试级别。具体调整内容如下:一、考试级别及科目1.一级新增“网络安全素质教育”科目(代..._计算机二级增报科目什么意思
conan简单使用_apt install conan-程序员宅基地
文章浏览阅读240次。conan简单使用。_apt install conan